РАБОТА 2. ОПРЕДЕЛЕНИЕ МОДУЛЯ ЮНГА ПО РАСТЯЖЕНИЮ ПРОВОЛОКИ
Цель paботы: исследование малого упругого продольного растяжения проволоки и определение модуля Юнга проволоки.
Описание лабораторной установки
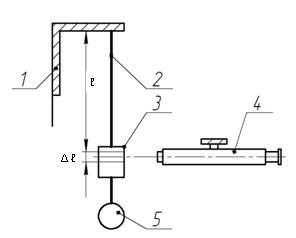
Рисунок 2.1 – Схема экспериментальной установки
В экспериментальной установке, изображенной на рисунке 2.1, металлическая проволока 2 одним концом неподвижно укреплена в верхнем кронштейне 1 прибора. Нижний конец закреплен в оправе 3, в середине которой размещен указатель с системой горизонтальных прямых. Зрительная труба 4, имеет вертикальную шкалу. Нижний конец проволоки нагружен постоянным грузом 5 для ее натяжения.
Порядок выполнения работы
1.Определить по шкале зрительной трубы положение горизонтальной черты, заданной преподавателем.
2. Записать в таблицу 2 положение n 0 черты без нагрузки.
3.Нагрузить проволоку последовательно грузами заданного преподавателем веса и произвести отчеты положения горизонтальной черты на шкале n.
4.Вычислить удлинение проволоки по формуле:
 (2.1)
(2.1)
где k - цена деления шкалы, указанная на рабочем месте.
5.Измерить диаметр проволоки микрометром и вычислить площадь поперечного сечения проволоки по формуле  (2.2)
(2.2)
где d-диаметр проволоки.
6. Произвести вычисление модуля Юнга для различных нагрузок по формуле (Т.2.4)
где L - длина проволоки (указана на рабочем месте).
7. Результаты измерений и вычислений записать в таблицу 2.
| F, Н
| n 0, дел
| n, дел
| Δℓ, м
| S, м2
| L,м
| E,Па
| E ср,Па
| Δ E,Па
| δE,%
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2 – Опытные и расчетные данные
8. Определить относительную погрешность по формуле
 (2.3).
(2.3).
9. Зная относительную погрешность вычислить абсолютную погрешность по формуле
ΔЕ= Еср·δЕ (2.4).
10. Записать окончательный результат в виде:
E=(Eср± ΔЕ) при δЕ= %
Контрольные вопросы
1.Ответьте на контрольные вопросы 1-12 теоретического введения к лабораторным работам 2, 3.
РАБОТА 4. ИЗУЧЕНИЕ УПРУГОГО УДАРА ШАРОВ
Цель paботы: экспериментальная проверка законов сохранения импульса и энергии при упругом ударе.
Теоретическое введение
Импульсом материальной точки называется векторная величина, равная произведению массы материальной точки на ее скорость  .
.
Импульсом системы тел называется векторная сумма импульсов всех тел, входящих в систему  .
.
Замкнутой системой тел называется такая система, на которую не действуют внешние силы. В замкнутой системе тел выполняется закон сохранения импульса: импульс замкнутой системы тел является величиной постоянной
 , если
, если  (4.1)
(4.1)
Ударом называется кратковременное взаимодействие двух тел, в результате которого за бесконечно малый промежуток времени происходит конечное изменение импульса. Удар называется центральным, если скорости соударяющихся тел до удара направлены по линии, соединяющей центры тел.
При ударе взаимодействие длится очень короткий промежуток времени  и возникают большие внутренние силы взаимодействия
и возникают большие внутренние силы взаимодействия  , так что внешними силами можно пренебречь и систему соударяющихся тел считать замкнутой. Следовательно, при ударе выполняется закон сохранения импульса.
, так что внешними силами можно пренебречь и систему соударяющихся тел считать замкнутой. Следовательно, при ударе выполняется закон сохранения импульса.
В зависимости от упругих свойств взаимодействующих тел соударения могут протекать весьма различно. Принято выделять два крайних случая: абсолютно упругий и абсолютно неупругий удары.
Абсолютно упругим называется удар, при котором после взаимодействия тела полностью восстанавливают свою форму. Таких ударов в природе не существует, так как всегда часть энергии затрачивается на необратимую деформацию тел. Однако для некоторых тел, например, стальных шаров, потерями механической энергии при столкновении можно пренебречь и считать удар абсолютно упругим. При абсолютно упругом ударе кроме импульса сохраняется и полная механическая энергия.
Полной механической энергией называется сумма кинетической и потенциальной энергий. Кинетическая энергия – это энергия движения, она вычисляется по формуле
 . (4.2)
. (4.2)
Потенциальная энергия – это энергия взаимодействия. При разных типах взаимодействия формулы для вычисления потенциальной энергии разные. В поле тяжести Земли потенциальная энергия вычисляется по формуле
 . (4.3)
. (4.3)
В замкнутой механической системе, в которой действуют только консервативные силы, полная механическая энергия сохраняется:
Ек + Еп = const. (4.4)
В случае центрального абсолютно упругого удара двух шаров с массами m1, m2 и скоростями  до удара и
до удара и  после удара можно записать законы сохранения импульса и механической энергии
после удара можно записать законы сохранения импульса и механической энергии
 , (4.5)
, (4.5)
 (4.6)
(4.6)
Для экспериментальной проверки закона сохранения импульса необходимо определить скорости шаров до удара, и скорости шаров послеих соударения. На установке правый шар с массой m1 отводят от положения равновесия на угол a0 (рисунок 4.1) и отпускают.

Рисунок 4.1. – Схема упругого удара шаров
Используем закон сохранения механической энергии для определения скорости первого шара перед ударом:
 (4.7)
(4.7)
Высоту h можно выразить через угол отклонения  :
:

Подставляя полученное выражение для h в уравнение (4.7), найдем скорость первого шара до удара
 (4.8)
(4.8)
Левый шар массой m2 висит неподвижно (v2 =0), его начальный импульс равен нулю. Закон сохранения импульса в проекции на ось Х в этом случае будет иметь вид:
 . (4.9)
. (4.9)
Величину скорости шаров  после удара найдем по углам отскока правого α1 и левого α2 шаров:
после удара найдем по углам отскока правого α1 и левого α2 шаров:
 (4.10)
(4.10)
Подставив выражения для скоростей (4.8) и (4.10) в закон сохранения импульса (4.9), получим формулу:
 (4.11)
(4.11)
Запишем выражение для кинетической энергии первого шара Ek1 до удара и кинетических энергий двух шаров  и
и  после удара, подставив в формулу (4.2) выражения (4.8) и (4.10)
после удара, подставив в формулу (4.2) выражения (4.8) и (4.10)

 (4.12)
(4.12)
Теоретическое введение
При подготовке к этой работе необходимо изучить теоретическое введение к работам 5,6,7,8.
После выстрела «пуля» попадает в «мишень» и прилипает к ее поверхности (рисунок 7.1). Соударение «пули» с «мишенью» происходит за столь короткое время, что поворотом рамки с «мишенью», а, следовательно, и действием момента сил упругости нити за это время можно пренебречь. Момент силы тяжести и силы натяжения нити относительно вертикальной оси равен нулю. Таким образом, относительно этой оси суммарный момент внешних сил, действующий на рамку и «пулю», равен нулю и при соударении выполняется закон сохранения суммарного момента импульса рамки и «пули». Момент импульса «пули» перед соударением L 1 = mv ℓ, где m - масса «пули», v – ее скорость, ℓ – прицельное расстояние.

Рисунок 7.1 – Схема опыта
После соударения рамка с грузами приходит во вращение с угловой скоростью ω, при этом ее момент импульса
 , (7.1)
, (7.1)
Здесь Ip - момент инерции рамки без грузов, M - масса каждого из грузов, ℓ1 - расстояние грузов от оси вращения. Вкладом в момент инерции массы прилипшей “пули” можно пренебречь из-за ее малости.
По закону сохранения момента импульса L 1 = L 2, следовательно:
 / (7.2)
/ (7.2)
Чтобы воспользоваться этой формулой, нужно найти угловую скорость рамки ω и момент инерции рамки с грузами  . Угловую скорость можно найти по углу максимального отклонения рамки φm после соударения. Вращение рамки тормозится под действием момента упругих сил в нити подвеса. При этом выполняется закон сохранения энергии. Кинетическая энергия вращающейся рамки переходит в потенциальную энергию закрученной нити:
. Угловую скорость можно найти по углу максимального отклонения рамки φm после соударения. Вращение рамки тормозится под действием момента упругих сил в нити подвеса. При этом выполняется закон сохранения энергии. Кинетическая энергия вращающейся рамки переходит в потенциальную энергию закрученной нити:
 , (7.3)
, (7.3)
где k - постоянная кручения проволоки (коэффициент пропорциональности между моментом упругих сил) Мупр и углом закручивания нити φ: Мупр= - kφ.
Знак минус здесь показывает, что направление момента упругих сил противоположно углу закручивания. Из соотношения (7.3) находим выражение для угловой скорости:
 . (7.4)
. (7.4)
Модуль кручения k и момент инерции определяют значение периода колебаний рамки (Т.5.14).
Обозначим период колебаний рамки без грузов Т1, а с грузами T2, тогда используя формулу (Т.5.14) можем записать:
 (7.5)
(7.5)
 (7.6)
(7.6)
Сравнивая (7.6) и (7.4) получим
 . (7.7)
. (7.7)
Из уравнения (7.5) выразим  .
.
Подставим полученное выражение в уравнение (7.6), возведя это уравнение предварительно в квадрат
 / (7.8)
/ (7.8)
Из уравнения (7.6) выразим k

и подставив полученное выражение в уравнение (7.8) после простейших преобразований получим
 (7.9)
(7.9)
Подставив (7.7) и (7.9) в выражение (7.2) получим окончательную формулу
 . (7.10)
. (7.10)
Порядок выполнения работы
1. Установить грузы и мишень на рамке. Убедиться, что «мишень» находится на линии «выстрела» и перпендикулярна ей.
2. Установить снаряд на направляющий стержень 12 стреляющего устройства, взвести пружину (до первого щелчка). Произвести «выстрел», повернув ручку 13 спускового устройства к себе или от себя. Визуально определить максимальный угол отклонения рамки φm по шкале угловых перемещений. При этом нужно смотреть сверху установки.
3. Извлечь снаряд из пластилина и повторить п.2 «выстрел» и измерение угла максимального отклонения не менее трех раз. Записать результаты измерений в таблицу 7.1
4. Измерить штангенциркулем расстояние ℓ от оси вращения рамки до центра отпечатка «пули» в «мишени». Записать результаты измерений в таблицу 7.1
Таблица 7.1. –Опытные данные
| n измерения
| φm
| ℓ
| ℓ1
|
| 1
|
|
|
|
| 2
|
|
|
|
| 3
|
|
|
|
| 4
|
|
|
|
| 5
|
|
|
|
5. Включить установку в сеть, нажав кнопку ''Сеть'' на задней панели электронного блока. При этом на табло секундомера и счетчика колебаний появятся «минусы». Отклонить рамку с грузами на угол 40° градусов и зафиксировать с помощью электромагнита.
6.Нажать на электронном блоке кнопку «СБРОС», при этом обнуляются показания счетчиков колебаний и времени.
7.Нажать кнопку «ПУСК», при этом выключится электромагнит, и начнутся крутильные колебания рамки.
8.Определить время t, за которое происходит N колебаний рамки. Для регистрации времени необходимо нажать кнопку «СТОП» после того, как произойдет N полных колебаний. Количество колебаний задает преподаватель (в пределах 10 ÷ 15). Записать результаты в таблицу 7.2.
9. Снять грузы с рамки и провести измерения времени t1, за которое происходит N1 колебаний рамки без грузов. N1 задает преподаватель (в пределах 10 ÷ 15). Записать результаты в таблицу 7.2.
Таблица 7.2. – Опытные и расчетные данные
| n измерения
| N1
| t1
| T1
| N2
| t2
| T2
|
| 1
|
|
|
|
|
|
|
| 2
|
|
|
|
|
|
|
| 3
|
|
|
|
|
|
|
10. Вычислить среднее значение угла максимального отклонения при выстреле.
11. Вычислить периоды колебания рамки с грузами и без грузов по формуле  .
.
12. Используя среднее значение угла, вычислить по формуле (7.10) скорость «пули» v.
13. Вычислить относительную погрешность по формуле:

14. Вычислить абсолютную погрешность

15. Записать окончательный результат. 
Контрольные вопросы
1. Ответьте на контрольные вопросы 1-16 теоретического введения к работам 5,6,7,8.
Теоретическое введение
Гироскопом называется массивное симметричное тело, вращающееся с большой угловой скоростью Ω относительно оси симметрии. Гироскоп, закрепленный так, что его центр тяжести С совпадает с неподвижной точкой гироскопа называется уравновешенным.
Если на ось гироскопа действует некоторая сила, создающая момент  , то момент импульса
, то момент импульса  относительно точки С изменяется в соответствии с основным уравнением вращательного движения
относительно точки С изменяется в соответствии с основным уравнением вращательного движения
 . (9.1)
. (9.1)
Момент  силы и вектор
силы и вектор  сонаправлены. По истечении времени dt момент импульса и ось вращения гироскопа изменят свою ориентацию в пространстве:
сонаправлены. По истечении времени dt момент импульса и ось вращения гироскопа изменят свою ориентацию в пространстве:
 . (9.2)
. (9.2)
Ось вращения повернется на некоторой угол dα вокруг оси симметрии гироскопа. Вращение оси гироскопа с угловой скоростью ω под действием постоянного момента сил M называется прецессией гироскопа.
При этом диск гироскопа участвует одновременно в двух вращательных движениях: быстром (вокруг своей оси) и медленном (с угловой скоростью ω, связанном с поворотом самой оси).
Так как угловая скорость вращения гироскопа очень большая, то при относительно медленном изменении ориентации оси гироскопа главный момент импульса практически направлен по оси гироскопа. Поскольку вектор не меняет своей длины, то изменение этого вектора за время dt обусловлено исключительно его вращением со скоростью ω и определяется выражением:

 . (9.3)
. (9.3)
Сравнивая (9.1) и (9.3), получим
 ,
,
или в скалярном виде
 . (9.4)
. (9.4)
Учитывая, что для быстро вращающего гироскопа
 , (9.5)
, (9.5)
где I – момент инерции гироскопа относительно его оси, получим для угловой скорости прецессии
 (9/6)
(9/6)
Особенности прецессионного движения:
1) прецессия не обладает «инертностью» (прецессия существует, пока действуют моменты),
2) ось вращения прецессии не совпадает с направлением момента силы M, а перпендикулярна ему.
Применения гироскопов:
- в качестве компаса. Свободный гироскоп сохраняет свою ориентацию в пространстве (например, направление на полярную звезду) независимо от движения Земли и всевозможных толчков.
- в качестве автоматического устройства управления курсом торпед.
- в качестве автопилота в летательных аппаратах. В данном случае используется два гироскопа. Один задает горизонтальную плоскость, а второй - направление.
- в качестве успокоителя качки на кораблях.
Теоретическое введение
Плоскопараллельным движением твердого тела называется такое движение, при котором каждая частица тела движется в плоскости, параллельной некоторой неподвижной плоскости. Плоскопараллельное движение слагается из поступательного и вращательного движений. Примером такого движения служит маятник Максвелла. Маятник Максвелла состоит из тонкого металлического стержня (2) с симметрично укрепленным на нем диском (1) (рисунок 10. 1).

Рисунок 10.1 – Маятник Максвелла
К концам стержня прикреплена нить, пропущенная через два отверстия в планке (5), которая укреплена на массивном штативе. Нити тщательно, виток к витку, наматываются на стержень (от его концов к диску). После освобождения маятника он начинает движение из верхнего положения под действием силы тяжести: поступательное - вниз и вращательное - вокруг своей оси симметрии. Вращение, продолжаясь по инерции в низшей точке, когда нити уже размотаны, приводит вновь к наматыванию нитей на стержень, а, следовательно, и к подъему маятника. Затем движение маятника вверх замедляется, он останавливается, снова начинается движение вниз и т. д. Такой колебательный характер движения вверх-вниз напоминает движение маятника, и поэтому устройство называется маятником Максвелла. Цикл движения маятника Максвелла может быть подразделен на три стадии: спуск, удар, поднятие вверх. В процессе падения и подъема маятника его ускорение имеет постоянную величину. Удар приводит к кратковременной смене знака ускорения, связанной со значительным увеличением его модуля.
Движение маятника Максвелла можно рассматривать как суперпозицию поступательного движения (вниз и вверх) и вращения, происходящего под действием силы тяжести и силы натяжения нитей. Тогда, пренебрегая силами трения, запишем уравнения движения маятника Максвелла:
𝑚𝑎 = 𝑚𝑔 − 2𝑇, (10.1)
I 𝜀 = 2𝑟T, (10.2)
𝑎 = 𝑟ε, (10.3)
где m - масса маятника, I - момент инерции диска маятника относительно его оси, r - радиус стержня маятника, Т - сила натяжения одной нити, g - ускорение силы тяжести, а - ускорение поступательного движения центра масс маятника, ε - угловое ускорение маятника.
Из уравнений (10.1), (10.2) и (10.3) выведем формулу для ускорения поступательного движения маятника
 . (10.4)
. (10.4)
С другой стороны, для равноускоренного движения
 , (10.5)
, (10.5)
где 𝑡1 - время опускания маятника, ℎ1 - высота, на которую опускается центр масс маятника. Из выражений (10.4) и (10.5) получаем формулу для экспериментального определения момента инерции маятника
 (10.6)
(10.6)
РАБОТА 1. ИЗУЧЕНИЕ РАВНОУСКОРЕННОГО ДВИЖЕНИЯ НА МАШИНЕ АТВУДА
Цель paботы: изучение законов прямолинейного равноускоренного движения грузов в поле тяготения Земли.
Теоретическое введение
В работе изучается равноускоренное движение системы связанных грузов. Движение грузов описывается основным уравнением динамики (II законом Ньютона)
 , (1.1)
, (1.1)
где m – масса тела,  – ускорение этого тела,
– ускорение этого тела,  - сумма сил, действующих на тело.
- сумма сил, действующих на тело.




Рисунок 1.1– Движение связанных грузов
Машина Атвуда представляет собой блок, через который перекинута нить с грузами массой m1 и m2 (рисунок 1.1).. Если массы грузов имеют одинаковые значения, система находится в безразличном равновесии, и грузы неподвижны. В случае, если массы грузов отличаются на величину Δ m, система придет в движение и грузы начнут перемещаться с ускорением а.
Запишем уравнение динамики в проекции на вертикальную ось для первого груза:
m1· a= T - m1g. (1.2)
Запишем уравнение динамики в проекции на вертикальную ось для второго груза
- m2·a = T+ m2g. (1.3)
Вычитая из уравнения (1.2) уравнение (1.3) и учитывая, что натяжение нити для первого и второго груза одинаковы в приближении невесомости блока, получим выражение:
(m1 + m2)·a = (m2 –m1)·g. (1.4)
Отсюда следует:
 (1. 5)
(1. 5)
Для определения ускорения используем закон равноускоренного прямолинейного движения. Пройденный путь определяется формулой:
 . (1.6)
. (1.6)
При движении с нулевой начальной скоростью 
 .
.
Тогда экспериментальное значение ускорения связанных тел можно определить по формуле:
 (1.7)
(1.7)
Описание лабораторной установки
Машина Атвуда (рисунок 1.2) состоит из легкого блока (2) в виде сплошного диска, способного вращаться вокруг неподвижной горизонтальной оси, расположенной в верхней части вертикальной стойки (1).

Рисунок 1.2 -– Внешний вид машины Атвуда
На стойке нанесена шкала с сантиметровыми отметками. Через блок перекинута легкая нить, на концах которой закреплены грузики в виде цилиндров (3,4) разной массы m1 и m2. В левой верхней части стойки установлено электромагнитное пусковое устройство, позволяющее фиксировать положение грузиков. При отключении электромагнита грузики приходят в движение, одновременно включается электронный секундомер. Пройдя путь S, правый цилиндрик попадает своим нижним основанием в кронштейн (6), на котором установлен фотодатчик, останавливающий секундомер.
Порядок выполнения работы
1. Включить в сеть шнур питания прибора.
2. Перекинуть нить с двумя грузами через блок и убедиться, что система находиться в равновесии.
3. Установить кронштейн с фотодатчиком в нижней части шкалы вертикальной стойки так, чтобы плоскость кронштейна, окрашенная в красный цвет, совпала с одной из рисок шкалы, а правый груз при движении вниз проходил в центре рабочего окна фотодатчика.
4. Переместить нить с грузами так, чтобы правый груз занял верхнее положение.
5. Нажать на кнопку “СЕТЬ” секундомера, при этом должно включиться табло индикации и электромагнит, удерживающий систему в положении покоя.
ВНИМАНИЕ! Для предотвращения перегревания катушки электромагнитного тормоза - время его непрерывной работы не должно превышать 15 секунд, затем необходим перерыв не менее, чем на 5 секунд.
6. Положить на правый груз один из перегрузков, указанных преподавателем..
7. При помощи визира по шкале стойки определить путь S груза, как расстояние от нижней плоскости груза в верхнем положении до оптической оси фотодатчика.
8.Нажать кнопку «Старт» секундомера. При этом происходит растормаживание электромагнитного тормоза. Система связанных грузов приходит в движение, а таймер секундомера начинает отсчет времени.
9. При пересечении правым грузом оптической оси фотодатчика отсчет времени прекратится. Записать показания таймера, т.е. время движения грузов.
10. Повторить опыт еще 2 раза.
11. Результаты измерений записать в таблицу 1.1.
Таблица 1. 1 – Опытные и расчетные данные
| № опыта
| m1,кг
| m2,кг
| s, м
| t, с
| a, м/с2
| g, м/с2
| g ср, м/с2
| δg,%
| Δ g, м/с2
|
| 1
|
|
|
|
|
|
|
|
|
|
| 2
|
|
|
|
|
|
|
|
|
|
| 3
|
|
|
|
|
|
|
|
|
|
12.Зная пройденный путь и время движения определить значение ускорения а по формуле (1.7).
13.Рассчитать ускорение свободного падения g по формуле (1.5).
14.Определить среднее значение ускорения свободного падения g ср.
15. Вычислить относительную погрешность по формуле
 (1. 8)
(1. 8)
16. Вычислить абсолютную погрешность по формуле
 . (1.9)
. (1.9)
17. Записать окончательный результат в виде
g =(g ср ± Δg ср) м/с2 при δ g = … %
18.Сравнить теоретическое и экспериментальное значения ускорения свободного падения, определив величину
 (1.10)
(1.10)
Контрольные вопросы
1. Что такое траектория, путь, перемещение материальной точки?
2. Что называется скоростью?
3. Что называется ускорением?
4. Какое движение называется равномерным?
5. Какое движение называется равноускоренным?
6. Как зависит скорость от времени при прямолинейном равноускоренном движении?
7. Как зависит пройденный путь от времени при прямолинейном равноускоренном движении?
8. Сформулируйте законы Ньютона.
9. Выведите рабочую формулу для определения ускорения свободного падения.
10. Какие причины влияют на расхождение теоретического и экспериментального значений ускорения свободного падения?
10.






