Ленточные конвейеры служат для перемещения в горизонтальном и наклонном (до 18…22°) направлениях сыпучих, мелкокусковых и штучных грузов. Ленточные конвейеры изготовляют стационарными длиной до 150…200 м, передвижными и переносными длиной 5, 10, 15 и 20 м. Основными частями ленточного конвейера (рис. 5.1, 5.2) являются: металлическая рама, на которой установлены роликоопоры рабочей и холостой ветвей ленты 2. По концам конвейера лента огибает головной 4 и хвостовой 1 барабаны. Головной барабан обычно приводной, а хвостовой соединен с натяжным устройством, предназначенным для устранения возможного проскальзывания ленты. На конвейерах небольшой длины натяжные устройства выполняются винтовыми. Они требуют регулярного контроля натяжения ленты и его регулирования. На длинных конвейерах натяжение осуществляется автоматически под весом груза, соединенного с натяжным барабаном. Так как при изготовлении барабанов сложно избежать малозаметной конусности, то для исключения сбегания ленты в сторону барабаны должны иметь максимальный диаметр посередине со стрелой выпуклости 1,5…3,0 мм.
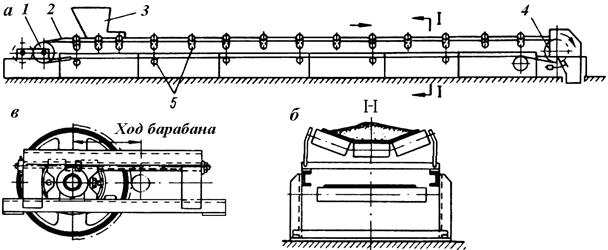
Рис. 5.1. Ленточный конвейер:
а – схема стационарного горизонтального конвейера; б – поперечный разрез; в – натяжное устройство; 1 –
натяжной барабан; 2 – лента; 3 – загрузочный бункер; 4 – приводной барабан; 5 – роликовые опоры
Роликоопоры установлены по всей длине конвейера и служат для восприятия веса перемещаемого груза и уменьшения провисания ленты. При гладкой ленте роликоопоры рабочей ветви выполняются однорольными, а при желобчатой состоят из двух или трех роликов (рис.5.1, б), а роликоопоры холостой ветви, как правило, выполняются однорольными.
Лента является одновременно и тяговым, и несущим органом. Наиболее часто применяют прорезиненные тканевые ленты, состоящие из нескольких слоев прорезиненной хлопчатобумажной ткани. Такие ленты прочны, гибки, мало вытягиваются и очень удобны при монтаже. Ширина ленты стандартизирована: 300, 400, 500, 650, 800, 1000, 1200, 1400 и 1600 мм. Для стационарных конвейеров большой длины применяют прорезиненные ленты,
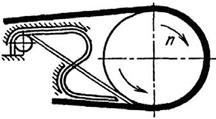
армированные стальными канатами. Соединение прорезиненных лент выполняется склеиванием с последующей вулканизацией стыка или сшиванием сыромятными ремешками. Высокоскоростные конвейеры, например, на роторных экскаваторах, а также конвейеры для вертикального подъема груза снабжаются прижимной лентой, опирающейся на гибкие ролики, выполненные в виде витых пружин. Простейшим устройством для удержания ленты от движения в обратную сторону, например, при отключении электродвигателя служит ленточный останов (рис. 5.3).
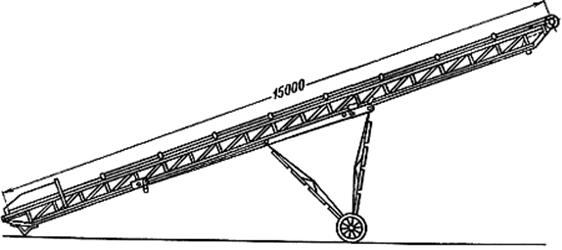
Рис. 5.2. Передвижной конвейер
Рис. 5.3. Ленточный останов
Загрузка конвейеров происходит через подвижные или стационарные бункеры или воронки, а разгрузка производится через концевой барабан (рис.5.1) или с помощью плужковых сбрасывателей (5.4, а). При необходимости подачи материала в различные бункеры, он разгружается с помощью разгрузочных тележек (рис. 5.4, б), которые могут иметь перекидной затвор.
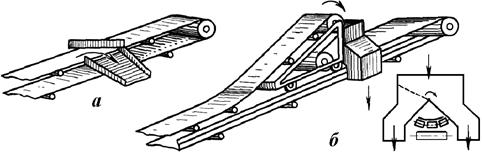
Рис. 5.4. Разгрузочные устройства ленточных конвейеров:
а – плужковый сбрасыватель; б – разгрузочная тележка
Вращение от двигателя к приводному барабану передается через редуктор, передаточное число которого определяется по формуле
n дв
 i =
i =
n б
n двπ D б
 = ,
= ,
60 V л
где n дв – число оборотов вала двигателя в мин; n б – число оборотов приводного барабана; D б
– диаметр приводного барабана; V л – скорость движения ленты, м/с.
Скорость ленты принимается не более 2 м/с для отсутствия пыления некоторых сыпучих материалов и избежания проскальзывания материала при его разгоне (во время попадания на ленту). Высокоскоростные конвейеры, например, на роторных экскаваторах, а также конвейеры для вертикального подъема груза снабжаются прижимной лентой, опирающейся на гибкие ролики, выполненные в виде витых пружин (рис. 5.5). Угол наклона ленточного конвейера без прижимной ленты должен быть меньше угла трения (в движении) материала по ленте конвейера.
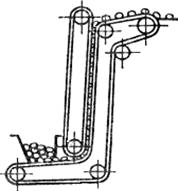
Рис. 5.5. Конвейер с прижимной лентой
Мощность, расходуемая на привод ленточного конвейера, определяется по формуле:
1 ⎛ QV 2 ⎞
 N = ⎜ QH +
N = ⎜ QH +
367 ⎝
fQL +
⎟ кВт,
 2 g η ⎠
2 g η ⎠
где Q – производительность конвейера в т/ч; Н – высота подъема материала в м (для наклонных конвейеров); L – длина конвейера в м; f – коэффициент сопротивления движения ленты с учетом трения в подшипниках (f = 0,05); V – скорость движения ленты в м/сек; η – к.п.д. конвейера η = 0,5…0,7.

 Зная окружное усилие Р, можно при заданном угле (α) обхвата лентой приводного барабана определить натяжение концов ленты: сбегающего
Зная окружное усилие Р, можно при заданном угле (α) обхвата лентой приводного барабана определить натяжение концов ленты: сбегающего
t = P
(e μα -1)
и набегающего
T = Pe μα
(e μα - 1). Такой простой способ
определения мощности двигателя и натяжения ленты пригоден только для конвейеров прямолинейной формы и небольшой длины, в которых угол обхвата
α £ 250o заведомо обеспечивает передачу необходимого тягового усилия.
В конвейерах сложной формы и большой длины натяжение ленты следует определять на отдельных ее участках, обходя по контуру весь конвейер (рис. 5.6). Минимальное натяжение S 1 имеет место у холостой ветви, т.е. после схода ленты с приводного барабана. Минимальное натяжение рабочей ветви S4 определяют, исходя из нормального провеса ленты между роликовыми опорами. Усилие натяжения ленты должно обеспечить не только необходимую силу трения между лентой и приводным барабаном, но и определенную стрелку провеса груженой ленты между роликовыми опорами, не превышающую
значения
f = ξ × l р, где ξ – коэффициент провеса (0,03 для прорезиненных лент и 0,012 для
стальных лент); l р – расстояние между опорами.
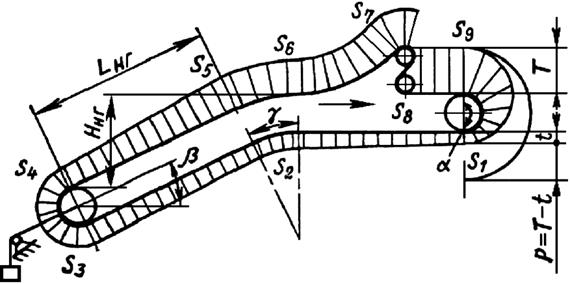
Рис.5.6. Расчетная схема ленточного конвейера
Эпюра на роликах разгрузочного устройства не показана (кроме участка на верхнем ролике)
Для конвейера, показанного на рис. 5.5 натяжение в конце наклонного груженого участка составит
S 5 = S 4 + W 4 ,
где W 4
= W нг
= (q + q
) gL
(sin β + w cosβ)
– сопротивление перед входом на роликовую
направляющую перед горизонтальным участком ленты;
q – погонная масса транспортируемого материала в кг;
q л – погонная масса ленты в кг;
w – коэффициент сопротивления перемещению ленты с грузом (включает сопротивление на роликовых опорах и деформацию ленты).
Натяжение ленты после огибающего ролика
 S 6 = S 5 + W ог,
S 6 = S 5 + W ог,
где
W ог
= 2 S 5
(w sin γ
2 + ξ) – сопротивление на огибающем ролике (в данном случае
γ = β); w – коэффициент сопротивления огибающего ролика; ξ – коэффициент провеса.
Натяжение ленты перед разгрузочным устройством
S 7 =
S 6 +
W 6-7 ,
где
W 6-7
= (q + q
6-7 w
– сопротивление на горизонтальном и наклонном участках до
разгрузочного устройства.
Натяжение после разгрузочного устройства
S 8 = S 7 + W ру,
где W ру – сопротивление на разгрузочном устройстве, определяемое в зависимости от его типа.
Максимальное натяжение ленты перед приводным барабаном
S 9 = S 8 + W 8-9,
где
W 8-9 = q л gL 8-9 w
– сопротивление на горизонтальном порожнем участке перед
приводным барабаном.
Натяжение ленты перед натяжным барабаном
S 3 = S 4 - W нб ,
⎛ d α ⎞
где
W нб
= (S + S)× ⎜⎜ D
μ sin + ζ⎟
 2
2
– сопротивление на натяжном барабане; μ –

⎝ б ⎠
коэффициент трения подшипников; (
S +
S)
– геометрическая сумма натяжений ветвей
ленты, огибающих барабан (без большой погрешности она равна 2 S 4).
Натяжение в точке перегиба нижней ветви ленты
S 2 = S 3 - W нп,
где W нп = q л gL нп (sin β + w cosβ) – сопротивление на наклонном порожнем участке.
Натяжение сбегающей ветви
S 1 = S 2 - W гп,
где W гп = q л gL гп w
– сопротивление на горизонтальном порожнем участке.
Зная S 9 и S 1, определяют необходимое окружное усилие на приводном барабане
P = S 9 - S 1 = T - t

 Необходимый угол охвата α определится из соотношения
Необходимый угол охвата α определится из соотношения
e μα =
S
S 1 = T t.
 Для обеспечения необходимого угла охвата α можно применить прижимные ролики, увеличивающие угол охвата.
Для обеспечения необходимого угла охвата α можно применить прижимные ролики, увеличивающие угол охвата.
Если из выражения
e μα = S
S 1 = S н
S сб
угол охвата получается настолько
большим, что он конструктивно неприемлем, следует увеличить натяжение ленты за счет массы дополнительного груза
т доп (в кг), которая может быть определена из уравнения:
S - S
e μα¢

m доп =
0,5 e
-1),
н сб
¢
где α′ – фактически используемый угол охвата барабана лентой.
Аналогичным методом могут быть определены натяжения ленты на различных участках, необходимый угол обхвата, окружное усилие, мощность привода и при других конфигурациях конвейеров.
Работоспособность всех элементов мощных конвейеров должна быть проверена при пусковом режиме.
В некоторых конструкциях погрузочных машин применяются скребковые конвейеры, перемещающие груз скребками по неподвижной поверхности, а также внутри трубы или желоба.
В тех случаях, когда необходимо транспортировать горячие и острокромочные материалы, а также кусковые или штучные грузы большой массы, применяют цепные пластинчатые транспортеры.
Элеваторы служат для перемещения грузов и материалов в вертикальном или круто наклонном (α ≈ 60º) направлениях. Для транспортирования сыпучих (цемент, песок) и мелкокусковых (щебень, гравий, шлак) материалов используют ковшовые элеваторы, а для штучных – полочные и люлечные. Несущим органом в элеваторе являются ковши или полки, а тяговым – втулочно-роликовая цепь или прорезиненная лента, на которой они смонтированы. Ковшовые элеваторы используются в дробильно-
сортировочных установках, растворных узлах, установках по приготовлению бетонных и асфальтобетонных смесей.
Рис.5.7. Ковшовые конвейеры (элеваторы):
а – ленточный; б – двухцепной; в – одноцепной; г – наклонный закрытый; д – наклонный открытый; е –
люлечный; ж – полочный; з – пассажирский кабинный
Ковшовый элеватор имеет бесконечный замкнутый тяговый орган 1 (рис. 5.6), на котором с равными интервалами укреплены ковши 2. Тяговым органом являются ленты (рис. 5.7, а), две или одна цепь (рис. 5,7, б и в). Лента огибает приводной 3 и натяжной 4 барабаны, укрепленные в крайних точках элеватора. Цепь огибает укрепленные в этих же точках звездочки. В пролете между крайними точками тяговый орган в вертикальных элеваторах небольшой высоты опор не имеет. В наклонных и высоких вертикальных элеваторах лента опирается на направляющие ролики. Цепи катятся роликами по направляющим (рис. 5.7, г) или опираются, так же как и лента, на направляющие ролики.
Элеватор защищен металлическим кожухом с окнами для осмотра, состоящим из отдельных секций. Наклонные элеваторы иногда бывают открытыми, без кожуха (рис. 5.7, д). С кожухом соединяют загрузочный и разгрузочный башмаки в местах загрузки и разгрузки. Привод барабана или звездочек устанавливают в верхней части элеватора. Вал нижнего барабана или звездочки вращается в передвигающихся подшипниках, связанных с винтовым натяжным устройством.
Элеваторы применяют для транспортирования материала на высоту до 50 м при производительности до 500 м3/ч. Они особенно удобны для заполнения высоких хранилищ – силосов или бункеров.
Различают элеваторы быстроходные, со скоростью тягового органа
1,25…2,0 м/с, тихоходные, со скоростью 0,4…1,0 м/с.
Быстроходные элеваторы применяют для транспортирования порошкообразных, мелко- и среднекусковых материалов; тихоходные – для транспортирования среднекусковых абразивных, крупнокусковых и плохо подвижных материалов.
Ковши крепят к тяговому органу с зазорами (в элеваторах с расставленными ковшами) или вплотную один к другому (в элеваторах с сомкнутыми ковшами). Первые элеваторы быстроходные, вторые – тихоходные. Загрузка ковшей быстроходных элеваторов происходит при прохождении ими нижнего (загрузочного) башмака, путем зачерпывания рис. 5.7, а и б). В тихоходных элеваторах загрузка производится путем засыпания материала в ковш (рис. 5.7, в, г и д).
В тихоходных элеваторах разгрузка ковшей осуществляется гравитационным путем, т.е. естественным высыпанием транспортируемого материала в лоток, при повороте ковшей вокруг верхней звездочки. В быстроходных элеваторах разгрузка ковшей происходит путем выбрасывания материала из ковшей под действием возникающей при повороте ковша вокруг звездочки силы инерции. Промежуточным типом являются элеваторы с гравитационно-центробежной разгрузкой (рис. 5.6, б), в которых разгрузка происходит в основном путем высыпания, но некоторая часть материала, находящаяся на поверхности ковша, выбрасывается под действием силы инерции. В таких (преимущественно цепных) элеваторах целесообразно размещать ковши между цепями и отклонять их направляющими роликами (рис. 5.7, б).
Разновидностью ковшовых элеваторов являются подъемники непрерывного действия для штучных грузов. В этих устройствах к тяговым цепям крепят не ковши, а шарнирно подвешенные площадки – люльки (рис. 5.7, е), что дает возможность не только поднимать, но и опускать грузы. Такие элеваторы называют люлечными. При жестком креплении полок к тяговым цепям элеватор делают наклонным (рис. 5.7, ж), он используется преимущественно для подъема различных штучных грузов, подающихся самотеком на полки и самотеком скатывающихся с них. Такие элеваторы используются в основном как погрузочно-разгрузочные устройства.
Элеваторы применяют и как пассажирские подъемники непрерывного действия (рис. 5.7, з). Кабины для пассажиров подвешивают шарнирно к двум цепям, что обеспечивает свободное прохождение через верхние и нижние звездочки.
Производительность ковшовых элеваторов колеблется от 5…10 до
150…200 м3/ч, определяется по формуле:
 П = 3600 v qk
П = 3600 v qk
t н
м3/ч;
П = 3600 v
 t
t
qk н γ
т/ч,
где v – скорость движения ковшей (0,4…2 м/с); t – шаг ковшей в м; v / t – число ковшей, разгружаемых за 1 с; q – емкость одного ковша; (колеблется в пределах от 0,65 до 35 л); k н – коэффициент наполнения ковшей материалом, равный 0,75…0,8 (цемент, сухой песок);
0,6…0,9 (щебень, гравий) и 0,4…0,6 (влажный песок); γ – объемный (насыпной) вес транспортируемого материала в т/м3.