Переходные электромеханические процессы в соответствии с целями анализа условно можно разделить на три основных вида:
переходные процессы при больших кратковременных возмущениях и малых изменениях частоты вращения ротора (динамическая устойчивость системы, большие качания генераторов и др.);
переходные процессы при больших возмущениях и больших изменениях частоты вращения ротора (работа синхронной машины при асинхронном режиме, процессы ресинхронизации после нарушения устойчивости, самосинхронизации генераторов, автоматическое повторное включение, асинхронный пуск двигателей и пр.);
переходные процессы при малых возмущениях и малых изменениях частоты вращения ротора (статическая устойчивость электрических систем, выбор способов автоматического регулирования возбуждения генераторов, обеспечивающих устойчивую работу системы).
Исследования переходных процессов первой группы дают возможность судить об устойчивости режима при больших возмущениях, возникающих вследствие резких и существенных изменений режима системы. Причинами таких изменений являются:
КЗ в системе и последующие их отключения;
изменения схемы соединения системы в результате отключений агрегатов или ЛЭП со значительными нагрузками;
нормальные включения или отключения ЛЭП с большой зарядной мощностью;
включения генераторов под действием самосинхронизации.
Во всех этих случаях возникают значительные отклонения параметров установившегося режима.
Восстановление исходного состояния системы после большого возмущения или состояния, допустимого для ее эксплуатации по параметрам режима, обеспечивает сохранение динамической устойчивости СЭС.
Исследования переходных процессов второй группы позволяют определить, будет ли восстановлена синхронная работа части или всей системы после выпадения из синхронизма. Способность системы восстанавливать исходное состояние после нарушения синхронной работы и некоторого, допустимого по условиям эксплуатации, асинхронного хода в результате большого возмущения позволяет обеспечить результирующую устойчивость СЭС.
Исследования переходных процессов третьей группы позволяют судить об устойчивости режима при малых возмущениях. К ним относятся нормальные переходные процессы, сопровождающие эксплуатационные режимы системы, которые связаны с изменениями нагрузки и с реакцией регулирующих устройств. Эти процессы возникают при включениях и отключениях генераторов, трансформаторов, линий, нагрузок и других элементов СЭС. Малые возмущения не должны приводить к прогрессивно возрастающему изменению параметров режима равновесия СЭС.
Восстановление исходного или весьма близкого к нему режима в условиях малых возмущений сохраняет статическую устойчивость СЭС.
При выполнении расчетов различают простейшие, простые и сложные позиционные консервативные системы и сложные диссипативные ЭС. Сложность систем может оцениваться в зависимости от степени идеализации математического описания процесса (консервативная позиционная система, диссипативная система), конфигурации (сложность сети, число учитываемых генераторов) и способа учета нагрузок (постоянные сопротивления, постоянные мощности, статические и динамические характеристики).
Консервативные позиционные системы — это такие системы, в которых мощность (момент) генераторов зависит только от взаимного положения их роторов. Идеализация здесь состоит в том, что любые возмущения приводят к незатухающим колебаниям в системе. Все регулирующие устройства в этих системах учитываются упрощенно. Рассмотрение диссипативной системы предполагает зависимость мощностей (моментов) генераторов как от взаимного положения, так и от скорости изменения их положения и других электрических и механических параметров, обусловленных динамикой регулирования.
В зависимости от задач расчетов и степени идеализации описания переходных электромеханических процессов различают:
ориентировочные расчеты (на первых стадиях проектирования и на перспективу эксплуатации);
уточняющие и настроечные расчеты при проектировании и в эксплуатации (выбор схем, режимов, уточнение параметров оборудования и т. д.);
оперативно-эксплуатационные в зависимости от конкретных задач и исследовательские расчеты.
Анализ переходных электромеханических расчетов ведется применительно к задачам основных режимов (нормальной работы ЭС при наиболее напряженных длительных условиях, ремонтных и послеаварийных, а также кратковременных особо тяжелых режимов).
Точность результатов анализа электромеханических процессов определяется степенью идеализации их магматическою описания, точностью используемых исходных данных, техническими средствами анализа.
В практических расчетах устойчивости СЭС принимается ряд допущений, которые, упрощая анализ электромеханических переходных процессов, не приводят к существенным погрешностям их расчета. Полагают, что:
электромеханические переходные процессы протекают при небольших изменениях частоты вращения синхронных машин (2— 3 % синхронной частоты);
напряжение и ток генератора, а также ток возбуждения изменяются мгновенно;
изменения режима СЭС можно отразить в ее схеме, если ввести в нее новые значения э. д. с. генераторов, мощностей, собственных и взаимных сопротивлений;
несимметричные режимы с помощью комплексной схемы замещения можно привести к симметричным режимам. При этом считают, что изменения движения ротора вызваны только моментами, создаваемыми токами прямой последовательности;
изменения сопротивлений генераторов и трансформаторов, обусловленные насыщением стали, можно не учитывать или учитывать приближенно уменьшением сопротивления схемы замещения до  .
.
результирующее потокосцепление обмотки возбуждения в продольной оси в течение всего переходного процесса постоянно, что соответствует постоянству э.д.с. на зажимах генератора.
Задачей поддержания требуемого режима СЭС является ограничение изменений параметров узловых точек системы в таких пределах, при которых сохраняется ее устойчивость, т. е. способность системы восстанавливать исходный или близкий к нему режим после его нарушения под воздействием различных возмущений.
Для предвидения характера переходного процесса и управления им необходимо овладеть способами изменения соответствующего режима СЭС в желательном направлении. Устойчивость системы определяется на основании расчета и анализа электромеханических переходных процессов с учетом нормального и послеаварийного установившихся режимов.
В процессе эксплуатации СЭС балансы мощности турбин и генераторов, электроприводов и нагрузок периодически нарушаются. Это происходит из-за несовпадения реального графика нагрузки с планируемым. С учетом принятых допущений уравнение баланса мощности для отдельного агрегата турбина - генератор в относительных единицах можно записать в виде
 (1)
(1)
где  - мощность турбины, определяющая исходный установившийся режим системы
- мощность турбины, определяющая исходный установившийся режим системы  ;
;
 - электромагнитная мощность генератора;
- электромагнитная мощность генератора;
 - потери в агрегате;
- потери в агрегате;  - демпферный коэффициент;
- демпферный коэффициент;
 - угол, определяющий пространственное положение продольной оси ротора;
- угол, определяющий пространственное положение продольной оси ротора;
 - постоянная инерции вращающихся масс турбины и генератора, причем
- постоянная инерции вращающихся масс турбины и генератора, причем
 (2)
(2)
Здесь  - масса подвижных элементов;
- масса подвижных элементов;  - суммарный диаметр подвижных масс;
- суммарный диаметр подвижных масс;  и
и  -синхронная и номинальная частоты вращения;
-синхронная и номинальная частоты вращения;  - номинальная мощность агрегата;
- номинальная мощность агрегата;  - маховый момент.
- маховый момент.
Выражение (1) называют уравнением электромеханических переходных процессов. Если потерями мощности в агрегате и потерями в демпферных контурах пренебречь, то это уравнение примет вид
 (3)
(3)
или
 (4)
(4)
где  - угловая скорость;
- угловая скорость;  - угловое ускорение вращающихся масс.
- угловое ускорение вращающихся масс.
Таблица 1 Выражение величин, входящих в уравнение (1)
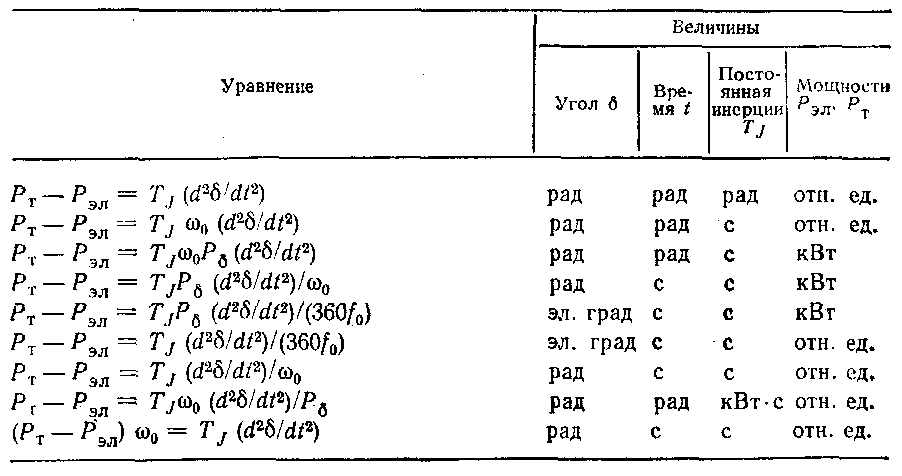
Форма записи уравнения (3) зависит от того, в каких единицах выражаются входящие в него величины (табл.1).
При  имеет место тормозящий момент, а при
имеет место тормозящий момент, а при  ускоряющий момент. Торможения или ускорения роторов генераторов являются следствием набросов и сбросов нагрузки. Возникающий при этом небаланс мощности покрывается за счет энергии вращающихся масс.
ускоряющий момент. Торможения или ускорения роторов генераторов являются следствием набросов и сбросов нагрузки. Возникающий при этом небаланс мощности покрывается за счет энергии вращающихся масс.
На устойчивость нагрузки существенное влияние оказывает изменение частоты вращения. Потребляемая электродвигателями активная (тормозная) мощность при номинальных значениях скольжения, коэффициента загрузки и без учета потерь зависит от частоты:
 (5)
(5)
Физически это означает, что при отклонениях частоты вращения двигателей с измененной угловой скоростью (ω = var) нужно изменять активную мощность.
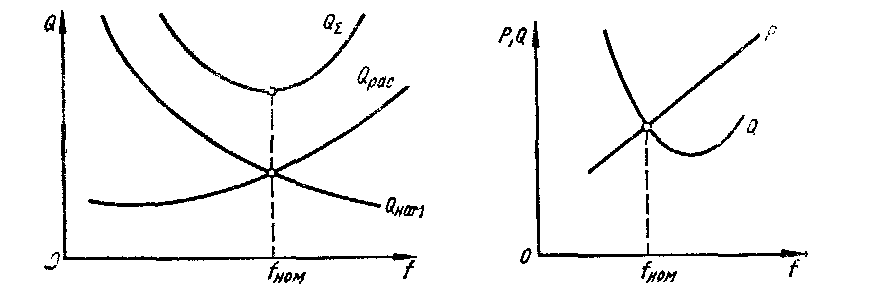
| Рис.1. Зависимость реактивной мощности электродвигателей от частоты
| Рис.2. Статические характеристики нагрузки энергетической системы
|
Зависимость реактивной мощности двигателей от частоты вращения определяется выражением

 (6)
(6)
С повышением частоты намагничивающая мощность Qнам падает, так как уменьшается насыщение, а мощность рассеяния Qpac увеличивается (рис.1).
Для энергетической системы в целом зависимость активной P и реактивной Q мощностей от частоты вращения генераторов выражается посредством статических характеристик (рис.2).
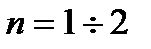
Мощность, развиваемая турбиной, зависит от массы пропускаемого через нее пара или воды в единицу времени и может изменяться с помощью первичных регуляторов, которые обладают статической или астатической характеристикой (рис.3). Статизм регулятора характеризуется коэффициентом статизма
 (7)
(7)
Первичные регуляторы частоты вращения имеют естественную статическую характеристику, С помощью дополнительных устройств (вторичных регуляторов) можно получить результирующую астатическую характеристику.
Частота в ЭЭС обычно регулируется ведущими электростанциями с учетом ограничения недопустимых перетоков мощности по транзитным электропередачам. При этом другие электростанции называются ведомыми по частоте. Ведущими могут быть также отдельные генераторы.
| Рис.3. Статическая (1)и астатическая (2) характеристики первичных регуляторов
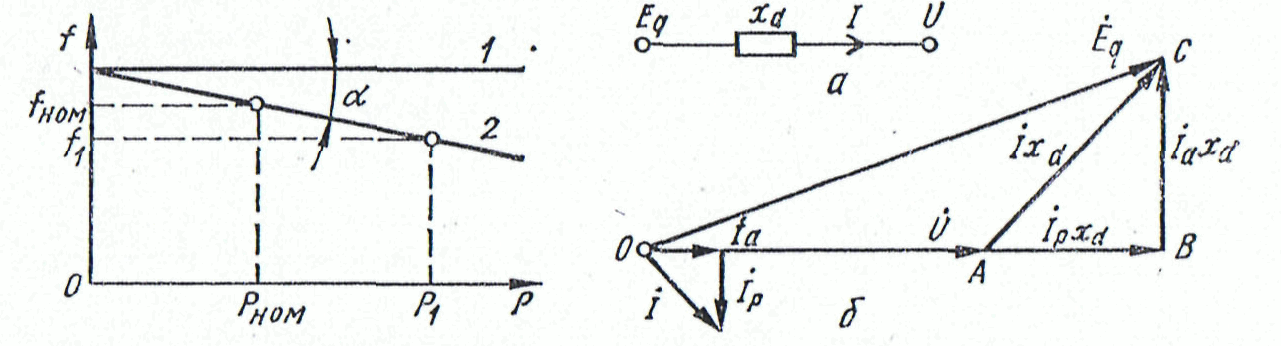
| Рис.4. Схема замещения синхронной машины синхронным сопротивлением (а) и ее векторная диаграмма (б)
|
Устойчивость СЭС в значительной мере определяется параметрами и характеристиками синхронных машин. При расчетах установившихся режимов синхронной машины используется схема ее замещения с синхронной э.д.с. Eq, приложенной за сопротивлением х d (рис.4, а). Эта э.д.с. пропорциональна установившемуся току возбуждения  . Поскольку
. Поскольку  и больше всего влияют на создание синхронного электромагнитного момента машины, они совместно с сопротивлением xd, за которым приложена э.д.с, получили название синхронных величин. Из векторной диаграммы (рис.4, б) и схемы замещения синхронной машины следует, что э.д.с. и напряжение
и больше всего влияют на создание синхронного электромагнитного момента машины, они совместно с сопротивлением xd, за которым приложена э.д.с, получили название синхронных величин. Из векторной диаграммы (рис.4, б) и схемы замещения синхронной машины следует, что э.д.с. и напряжение  на зажимах синхронной машины связаны соотношением
на зажимах синхронной машины связаны соотношением
 (8)
(8)
где  — ток статора (ток нагрузки синхронной машины).
— ток статора (ток нагрузки синхронной машины).
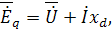
Рис.5. Схемы замещения синхронной машины переходными сопротивлениями и э. д. с. (а, б) и характер изменения ее результирующего магнитного потока (в)
При заданной нагрузке синхронной машины (I = const) напряжение на ее зажимах пропорционально э.д.с, значение которой зависит от тока возбуждения . Следовательно, напряжение синхронных машин можно регулировать изменением тока возбуждения. На этом принципе основаны устройства АРВ, предназначенные для регулирования напряжения на зажимах синхронной машины.
При расчетах электромеханических переходных процессов, используется схема замещения синхронной машины с переходной э.д.с. Е', приложенной за сопротивлением x' d (рис.5, а). Эта е.д.с. пропорциональна суммарному магнитному потоку, сцепленному с ротором. При всяком изменении режима результирующий магнитный поток генератора сначала остается неизменным, а затем плавно переходит к новому постоянному значению (рис.5, в). Индуцируемая этим потоком э.д.с. Е' так же, как и поток, в первый момент времени остается неизменной и сохраняет то же значение, которое было до изменения режима. Поэтому э.д.с. Е' является связующей величиной при переходе от одного режима синхронной машины к другому, отчего Е' и x' d получили название переходных величин.
Поскольку э.д.с. Е' мало отличается от проекции E' q этой е.д.с. на вектор , при расчетах часто полагают  и используют схему замещения, показанную на (рис.5, д).
и используют схему замещения, показанную на (рис.5, д).
Статическая устойчивость
Из рассмотрения простейших механических систем следует, что естьсостояния (режимы), в которых системы после случайного возмущения стремятся восстановить исходный или близкий к нему режим (рис.6). В других режимах случайное возмущение уводит системы от исходного состояния. В первом случае системы являются устойчивыми, во втором — неустойчивыми.
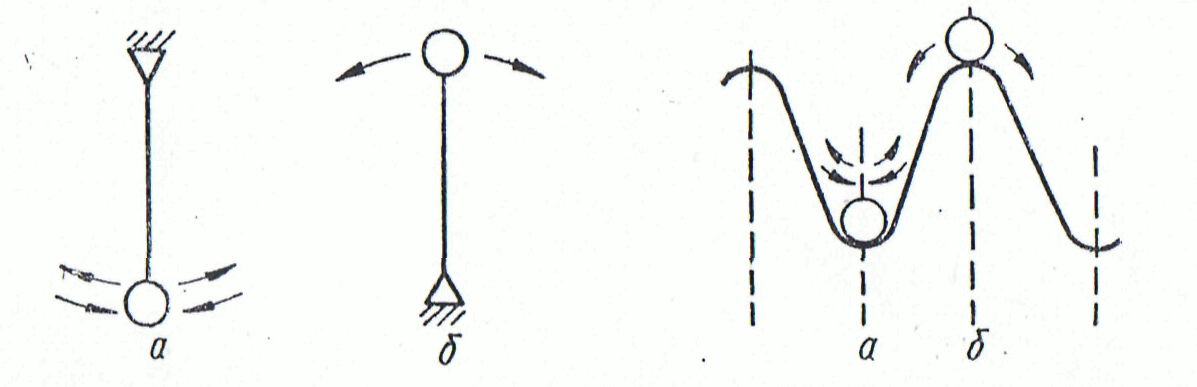
Рис.6. Устойчивые (а) и неустойчивые (б) состояния равновесия механических систем
В установившемся режиме между энергией источника WГ, поступающей в систему извне, и энергией, расходуемой в нагрузке и на покрытие потерь, имеется баланс. При каком-либо возмущении, проявляющемся в изменении параметра режима П на  , этот баланс нарушается.
, этот баланс нарушается.
Если система обладает такими свойствами, что энергия
 9
9
после возмущения расходуется более интенсивно, чем приобретается от внешнего источника  , то новый режим, возникший в результате возмущения, не может быть обеспечен энергией и в системе должен восстановиться прежний установившийся или близкий к нему режим. Такая система устойчива.
, то новый режим, возникший в результате возмущения, не может быть обеспечен энергией и в системе должен восстановиться прежний установившийся или близкий к нему режим. Такая система устойчива.
Из определения устойчивости следует, что условием сохранения устойчивости системы (критерием устойчивости) является соотношение
 (10)
(10)
или в дифференциальной форме
 (11)
(11)
Величину  называют избыточной энергией. Эта энергия положительна, если дополнительная генерируемая энергия, появившаяся при возмущении, возрастает интенсивнее, чем нагрузка системы с учетом потерь в ней. При этом условии критерий устойчивости запишется в виде
называют избыточной энергией. Эта энергия положительна, если дополнительная генерируемая энергия, появившаяся при возмущении, возрастает интенсивнее, чем нагрузка системы с учетом потерь в ней. При этом условии критерий устойчивости запишется в виде
 (12)
(12)
т. е. режим устойчив, если производная от избыточной энергии по определяющему параметру П отрицательна.
Для обеспечения статической устойчивости системы существенное значение имеет запас статической устойчивости, который определяет допустимые пределы ухудшения режима до нарушения статической устойчивости. Запас статической устойчивости может характеризоваться углами сдвига роторов генераторов и напряжениями в узловых точках системы.
Большое значение имеет наличие запаса статической устойчивости в послеаварийном режиме, который уменьшается по сравнению с запасом статической устойчивости в нормальном режиме, причем в последнем запас устойчивости по увеличению мощности электрической передачи должен составлять 15 — 20 %, а в после-аварийном режиме 5 — 10 %, но эти значения строго не лимитируются.
Чтобы проверить статическую устойчивость системы, необходимо составить дифференциальные уравнения малых колебаний для всех ее элементов и регулирующих устройств, а затем исследовать корни характеристического уравнения на устойчивость. Поскольку строгое решение такой задачи очень сложно, в инженерных расчетах применяются приближенные методы исследования устойчивости, которые основываются на использовании практических критериев устойчивости.
Рассмотрим простейшую схему электрической передачи, в которой генератор работает через трансформатор и линию на шины неизменного напряжения, т. е. на шины системы, мощность которой настолько велика по сравнению с мощностью рассматриваемой электрической передачи, что напряжение на ее шинах можно считать неизменным по амплитуде и фазе при любых режимах (рис.7, а).
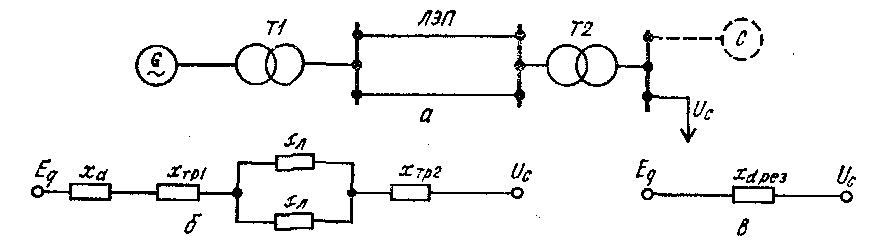
Рис.7. Схема электропередачи (а) и схемы ее замещения (б, в)
При исследовании характера переходного процесса удобно пользоваться угловой характеристикой  , где
, где  -электромагнитная мощность генератора; δ - угол сдвига по фазе между синхронной э. д. с. генератора Eq и напряжением на шинах приемной системы U с.
-электромагнитная мощность генератора; δ - угол сдвига по фазе между синхронной э. д. с. генератора Eq и напряжением на шинах приемной системы U с.
Из схем замещения рассматриваемой электропередачи (рис.7, б, в)следует, что результирующее сопротивление
 (13)
(13)
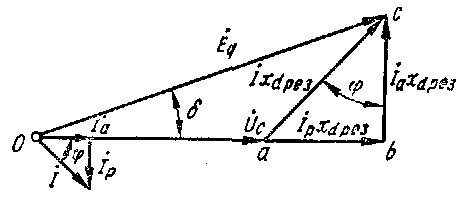
Рис.8. Векторная диаграмма для нормального режима работы электропередачи
Векторная диаграмма для нормального режима работы этой электропередачи показана на рис.8, откуда видно, что  , или
, или  . При этом
. При этом
 (14)
(14)
Умножив обе части равенства (14) на  , получим активную мощность, передаваемую приемной системе:
, получим активную мощность, передаваемую приемной системе:
 (15)
(15)
где

или

Из выражения (15) следует, что при постоянстве э. д. с. генераторов Е q и напряжения на шинах приемной системы Uc изменение передаваемой мощности Р зависит лишь от изменения угла δ.
Мощность, отдаваемую генератором в сеть, можно изменить также воздействием на регулирующие клапаны турбины. В исходном режиме мощность турбины уравновешивается мощностью генератора, работающего с неизменной частотой вращения. По мере открытия регулирующих клапанов (или направляющего аппарата у гидротурбин) мощность турбины возрастает, в результате чего равновесие вращающего и тормозящего моментов турбины и генератора нарушается, что вызывает ускорение вращения генератора.
При ускорении генератора вектор э. д. с.  перемещается относительно вращающегося с неизменной скоростью вектора напряжения приемной системы
перемещается относительно вращающегося с неизменной скоростью вектора напряжения приемной системы  . Связанное с этим увеличение угла δ приводит к соответствующему повышению мощности генератора по синусоидальному закону до тех пор, пока она вновь не уравновесит возросшую мощность турбины. Поскольку зависимость носит синусоидальный характер, с увеличением угла δ мощность Р сначала возрастает, а затем, достигнув максимального значения, начинает падать.
. Связанное с этим увеличение угла δ приводит к соответствующему повышению мощности генератора по синусоидальному закону до тех пор, пока она вновь не уравновесит возросшую мощность турбины. Поскольку зависимость носит синусоидальный характер, с увеличением угла δ мощность Р сначала возрастает, а затем, достигнув максимального значения, начинает падать.
При заданных значениях э. д. с. генератора Eq и напряжения приемника Uc существует определенный максимум передаваемой мощности, который называется идеальным пределом мощности. Он наступает при δ = 90° и определяется выражением
 (16)
(16)
Графическая зависимость активной мощности Р от угла δ показана на рис. 9.
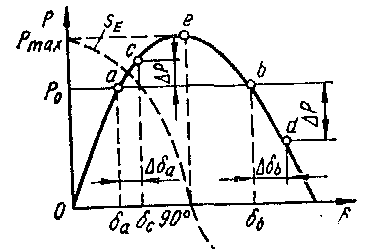
Рис.9. Угловая характеристика и характеристика синхронизирующей мощности генератора
В установившемся режиме мощность турбины Р 0 равна мощности генератора Р, т. е. между неизменной мощностью первичного двигателя и мощностью генератора существует равновесие. При этом каждому значению мощности турбины Р 0 соответствует две точки равновесия на угловой характеристике мощности генератора (см. рис.9) и, следовательно, два значения угла (δа и δb).
Однако устойчивый режим работы возможен лишь в точке а, что легко показать, рассмотрев характер движения ротора генератора при небольшом отклонении от точек равновесия (рис.10).
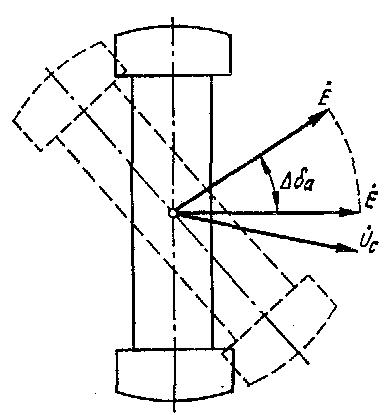
Рис.10. Изменение положения ротора генератора при малом возмущении
Предположим, что вследствие небольшого возмущения угол δа увеличился на Δδа. Этому случаю соответствуют переход рабочей точки на угловой характеристике из а в с и увеличение мощности генератора на Δ P т. е. положительному приращению угла соответствует положительное приращение мощности.
В результате увеличения мощности генератора при неизменной мощности турбины равновесие вращающего и тормозящего моментов турбины и генератора нарушается, и на валу машины возникает тормозящий момент. Под его влиянием ротор генератора начинает замедляться, что обусловливает перемещение связанного с ротором вектора э. д. с. генератора  сторону уменьшения угла δ. С уменьшением угла δ вновь восстанавливается исходный режим в точке а. Следовательно, данный режим системы является устойчивым. К этому же выводу можно прийти и при отрицательном приращении угла Δδ в точке а.
сторону уменьшения угла δ. С уменьшением угла δ вновь восстанавливается исходный режим в точке а. Следовательно, данный режим системы является устойчивым. К этому же выводу можно прийти и при отрицательном приращении угла Δδ в точке а.
В точке b на рис.9 положительное приращение угла Δδ сопровождается отрицательным изменением мощности генератора Δ Р. Уменьшение мощности генератора вызывает появление ускоряющего момента, под влиянием которого угол δ не уменьшается, а возрастает. С увеличением угла δ мощность генератора продолжает падать, что обусловливает дальнейшее увеличение угла δ и т, д. Процесс протекает прогрессивно и генератор выпадает из синхронизма, т. е. режим работы в точке b статически неустойчив.
Таким образом, состояние генератора, соответствующее точке а и любой другой точке на возрастающей части синусоидальной характеристики мощности, статически устойчиво, а состояние генератора, соответствующее всем точкам спадающей части характеристики, статически неустойчиво. Отсюда вытекает следующий критерий статической устойчивости системы:
или
 (17)
(17)
Из (17) следует, что статическая устойчивость системы обеспечивается, если приращения угла δ и мощности генератора Р имеют один и тот же знак.
Производную  принято называть синхронизирующей мощностью. Эта мощность характеризует реакцию генератора на увеличение угла сдвига ротора. Положительный знак ее является критерием статической устойчивости. Если АРВ отсутствует, то синхронизирующая мощность определяется выражением
принято называть синхронизирующей мощностью. Эта мощность характеризует реакцию генератора на увеличение угла сдвига ротора. Положительный знак ее является критерием статической устойчивости. Если АРВ отсутствует, то синхронизирующая мощность определяется выражением
 (18)
(18)
При δ <90° синхронизирующая мощность положительна и обеспечиваются устойчивые стационарные режимы работы системы (см. рис.9). Количественно статическая устойчивость характеризуется коэффициентом запаса

где Рmax и P0 – максимальная и номинальная мощности системы.
Динамическая устойчивость
Электроэнергетическая система динамически устойчива, если при каком-либо сильном возмущении сохраняется синхронная работа всех ее элементов. При исследовании устойчивости необходимо определить, как поведет себя система в экстремальных условиях и какие меры следует принять, чтобы избежать нежелательных последствий.
Для выяснения принципиальных положений динамической устойчивости рассмотрим явления, проходящие при внезапном отключении одной из двух параллельных цепей ЛЭП (рис, 11, а).
Схемы замещения электропередачи в нормальном режиме при работе с двумя включенными цепями и в режиме с одной отключенной цепью показаны на рис. 11, б и в соответственно. Результирующее сопротивление в нормальном режиме определяется выражением
 (19)
(19)
а после отключения одной из цепей - выражением
 (20)
(20)
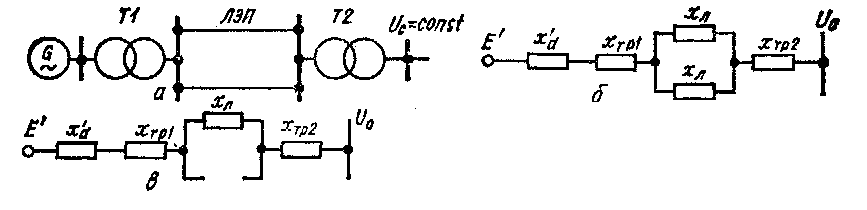
Рис.11. Схема электропередачи (а) и схемы ее замещения (б, в)
Так как 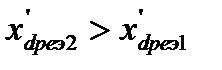 , то справедливо соотношение
, то справедливо соотношение

 (21)
(21)
Из(21) следует, что при неизменных  ,
,  и изменении
и изменении  максимальное значение передаваемой мощности меняется.
максимальное значение передаваемой мощности меняется.
При внезапном отключении одной из цепей ЛЭП ротор не успевает из-за инерции мгновенно изменить угол δ. Поэтому режим будет характеризоваться точкой b на другой угловой характеристике 2 на рис.12. После уменьшения его мощности возникает избыточный ускоряющий момент, под действием которого угловая скорость ротора, а следовательно, и угол δ увеличиваются. С увеличением угла мощность генератора возрастает по характеристике 2.
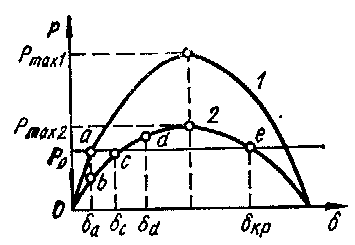
Рис. 12. Угловые характеристики мощности генератора при отключении одной цепи ЛЭП
В процессе ускорения ротор генератора по инерции проходит точку с, после которой его вращающий момент становится опережающим. Ротор начинает затормаживаться и, начиная с точки d, его угловая скорость уменьшается. При этом возникают затухающие колебания вокруг нового установившегося режима, соответствующего точке с. Если угловая скорость ротора возрастает до значения, соответствующего точке е или другим точкам на нисходящей части характеристики Р = f (δ), то генератор выпадает из синхронизма.
Следовательно, об устойчивости системы можно судить по изменению угла δ во времени. Изменение, показанное на рис. 13, а, соответствует устойчивой работе системы. При изменении δ по кривой, изображенной па рис. 13,б, система неустойчива.
Рис.13. Устойчивый (а) и неустойчивый (б) режимы работы системы
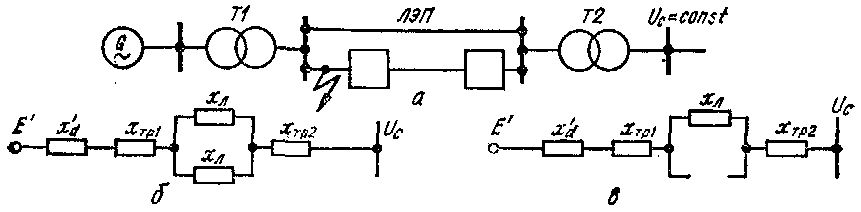
Pиc 14. Схема электропередачи (а) и схемы ее замещения для нормального (б) и послеаварийного (в) режимов
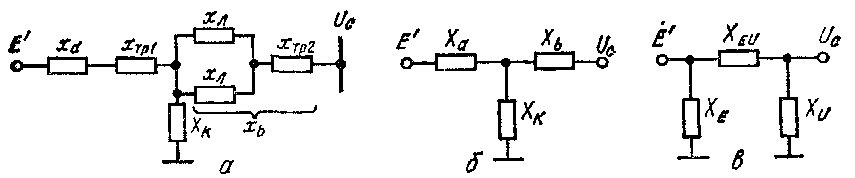
Рис.15. Схема замещения электропередачи для аварийного режима (а) и ее преобразования (б, в)
Рассмотрим переходный процесс при КЗ одной из цепей ЛЭП с последующим ее отключением (рис.14, а). Схемы замещения электропередачи для нормального и послеаварийного режимов показаны соответственно на рис. 14, б и в.
Угловая характеристика мощности генератора для нормального режима определяется выражением
 (22)
(22)
где

а для послеаварийного режима - выражением
 (23)
(23)
где

Схему замещения электропередачи для аварийного режима можно получить, если в точку КЗ включить шунтирующее сопротивление Хк (рис.15, а).
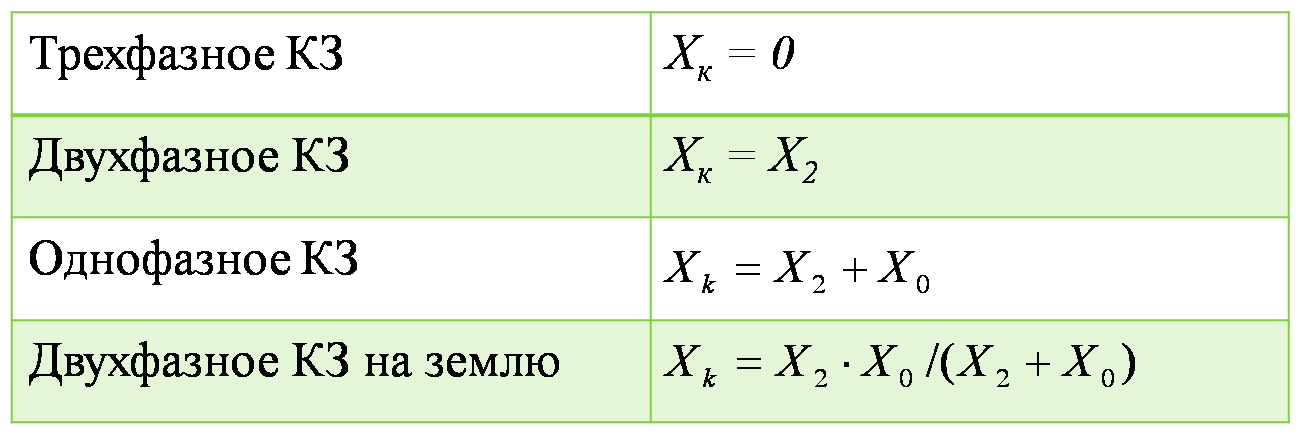
где Х0 и Х2 — суммарные сопротивления схем нулевой и обратной последовательностей относительно точки КЗ.
Схему замещения, показанную на рис.15, а,можно последовательно преобразовать из звезды (рис.15,б) в треугольник (рис. 15, в), в котором
 (24)
(24)
Сопротивления  и
и  , подключенные непосредственно к э. д. с.
, подключенные непосредственно к э. д. с.  и к напряжению
и к напряжению  , на активную мощность генератора в аварийном режиме существенно не влияют и могут не учитываться. При этом вся активная мощность генератора передается через сопротивление
, на активную мощность генератора в аварийном режиме существенно не влияют и могут не учитываться. При этом вся активная мощность генератора передается через сопротивление  , связывающее э. д. с. генератора с напряжением приемной системы , а угловая характеристика мощности генератора определяется выражением
, связывающее э. д. с. генератора с напряжением приемной системы , а угловая характеристика мощности генератора определяется выражением
 (25)
(25)
Амплитуда угловой характеристики мощности для аварийного режима зависит от сопротивления XEU. Это сопротивление является взаимным сопротивлением между э. д. с. E' и Uc. С уменьшением сопротивления шунта сопротивление XEUувеличивается, что приводит к снижению амплитуды угловой характеристики мощности. Наиболее тяжелый аварийный режим будет при трехфазном КЗ в начале ЛЭП, когда сопротивление XEU бесконечно велико, а амплитуда угловой характеристики мощности равна нулю. Самый легкий аварийный режим соответствует однофазному КЗ, при котором сопротивление шунта КЗ будет максимальным.
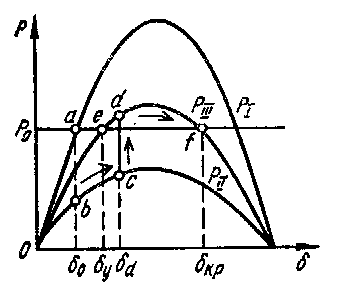
Рис. 16. Угловые характеристики мощности генератора для разных режимов
Угловые характеристики мощности генератора для нормального PI (δ), аварийного PII (δ) и послеаварийного PIII (δ) режимов показаны на рис. 16. Отдаваемая генератором мощность и угол между э. д. с. E'и напряжением Ucв нормальном режиме обозначены соответственно Р0 и δ0. В начальный момент КЗ из-за инерции ротора генератора угол δ мгновенно измениться не может. Это приводит к внезапному уменьшению мощности от точки а на характеристике Р I (δ) до точки b на характеристике PII (δ). В результате на валу генератора возникает некоторый избыточный ускоряющий момент, обусловленный разностью мощностей первичного двигателя и генератора, под влиянием которого ротор генератора начинает перемещаться относительно вектора напряжения приемной системы (угол δ увеличивается). Этому перемещению соответствует увеличение мощности по характеристике PII (δ) в направлении к точке с.
Если при каком-либо значении угла δоткл=δd поврежденная цепь отключится, то в этот момент произойдет изменение мощности генератора из точки с характеристики PII (δ) в точку d характеристики PIII (δ). Мощность же первичного двигателя генератора во время переходного процесса, ввиду инерционности системы регулирования частоты вращения турбины, останется неизменной и равной Р0. После отключения КЗ электромагнитная мощность генератора будет больше механической мощности турбины и на его валу появится тормозящий момент. Несмотря на это, ротор генератора еще некоторое время продолжает движение в сторону увеличения угла δ, пока не израсходуется запасенная им на пути от δ0 до δоткл кинетическая энергия. В этот период генератор покрывает избыток отдаваемой им электромагнитной мощности за счет кинетической энергии, запасенной им во время ускорения.
Если вся кинетическая энергия будет израсходована до достижения ротором генератора угла δкр (точка f на характеристике PIII (δ)), то под действием избыточного тормозящего момента ротор начнет перемещаться в обратном направлении по характеристике PIII (δ) и после нескольких колебаний перейдет в новый установившийся режим с углом δУ, Если ротор пройдет угол δкр, то избыточный момент вновь станет ускоряющим. С увеличением угла δ ускоряющий момент ротора будет прогрессивно возрастать и генератор выйдет из синхронизма. Таким образом, в первом случае система динамически устойчива, а во втором - неустойчива.
Рассмотренные переходные режимы системы при разных возмущениях позволяют сформулировать отличительные признаки статической и динамической устойчивости:
при статической устойчивости в процессе появления возмущений мощность генератора изменяется по одной и той же угловой характеристике, а после их исчезновения параметры системы остаются такими же, как и до появления возмущений;
при динамической устойчивости система переходит на другую угловую характеристику, причем после исчезновения возмущений ее параметры отличаются от первоначальных, но остаются в допустимых пределах.
Результирующая устойчивость
Результирующая устойчивость характеризует способность системы самопроизвольно восстанавливать синхронную работу после кратковременного нарушения устойчивости.
Если выпавшая из синхронизма система после устранения причины нарушения устойчивости вновь втягивается в синхронизм, то считают, что система с подключенными к ней генераторами обладает результирующей устойчивостью.
При расчете переходных процессов, вызванных нарушением устойчивости, пользуются понятиями асинхронного режима и асинхронного момента.
Асинхронным называется режим работы системы при больших отклонениях частоты вращения роторов ген






