Приборы
Электродинамические и ферродинамические приборы применяют для измерения постоянных и переменных токов и напряжений, мощности в цепях переменного и постоянного тока, фазового сдвига между переменными токами и напряжениями. Они являются наиболее точными электромеханическими приборами для цепей переменного тока.
Вращающий момент в электродинамических и ферродинамических механизмах возникает в результате взаимодействия магнитных полей неподвижных и подвижной катушек с токами. Измерительный механизм (рисунок 2.10) имеет две последовательные соединённые неподвижные катушки 1, разделенные воздушным зазором, и подвижную катушку 2. Ток к подвижной катушке подводится через пружинки, создающие противодействующий момент.
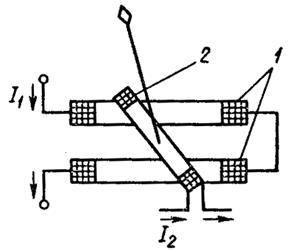
Рисунок 2.10
Электромагнитная энергия двух катушек с токами
 , (2.19)
, (2.19)
где L 1 и L 2 – индуктивности неподвижных и подвижной катушек,
M 1, 2 – взаимная индуктивность катушек,
i 1 и i 2 – токи, протекающие через катушки.
Уравнение преобразования, т.е. зависимость угла отклонения подвижной части от токов, протекающих через катушки, найдётся дифференцированием We, определяемой согласно (2.19) по углу поворота a, и приравниванием результата к противодействующему моменту, создаваемому возвратными пружинами. Поскольку индуктивности L2 и L2 не зависят от угла поворота, то и уравнение преобразования будет иметь вид
 . (2.20)
. (2.20)
Для постоянных токов I1, I2 уравнение (2.20) примет вид
 .
.
Для токов, имеющих синусоидальную форму i1 = Im1 sin w t, i2 = Im2 sin( w t+ j ), угол отклонения определяется из (2.20)
 (2.21)
(2.21)
Произведя несложные математические преобразования, и учитывая, что подвижная часть механизма из-за инерционности не будет реагировать на переменную составляющую, получим
 . (2.22)
. (2.22)
Для синусоидальных токов действующее значение  ,
,  , и формула (2.22) примет вид
, и формула (2.22) примет вид
a = S I1 I2 cos j,
где  - чувствительность электродинамического (ферродинамического) измерительного механизма.
- чувствительность электродинамического (ферродинамического) измерительного механизма.
При несинусоидальных токах, содержащих в общем случае постоянные составляющие, угол отклонения определяется суммой слагаемых, содержащих произведения действующих токов одной частоты, т.е.
a = S (I01I02 + I11I12 cos j 1 + I21I22 cos j 2 +…),
где I01 и I02 – постоянные составляющие токов,
I11 и I12 – первые гармоники действующих токов,
I21 и I22 – вторые гармоники действующих токов,
j 1 и j 2 – фазовые сдвиги между гармоническими составляющими токов в катушках.
На работу электродинамических измерительных механизмов сильное влияние оказывают внешние магнитные поля, так как собственное магнитное поле, создаваемое измерительным сигналом, невелико. Для защиты применяют магнитное экранирование, или применяют астатические механизмы. Электродинамические измерительные механизмы работают как на постоянном, так и на переменном токе (примерно до 10 кГц) с высокой точностью и обладают высокой стабильностью. По сравнению с магнитоэлектрическими приборами они имеют малую чувствительность, большое собственное потребление. Сложность конструкции, малая перегрузочная способность, дороговизна также являются существенным недостатком этих механизмов.
Ферродинамические измерительные механизмы отличаются от электродинамических тем, что неподвижные катушки у них имеют магнитопровод из листового магнитного материала, позволяющего существенно увеличить магнитный поток, а, следовательно, вращающий момент и чувствительность приборов. Однако использование ферромагнитного сердечника приводит к появлению погрешностей, вызванных нелинейностью кривой намагничивания, а также гистерезисом при работе на постоянном токе. Но, в отличие от электродинамических, ферродинамические приборы меньше подвержены влиянию внешних магнитных полей, так как имеют достаточно сильные собственные поля.
В ферродинамических и электродинамических амперметрах на малыетоки (до 0,5 А) неподвижные и подвижную катушки соединяют последовательно. В этом случае токи в катушках равны и угол отклонения
 . (2.23)
. (2.23)
Для получения линейной зависимости, а, следовательно, равномерной шкалы, у амперметров так располагают неподвижные катушки, чтобы зависимость  корректировала функцию (2.23), приближая ее к линейной. Практически шкала линейна на участке 25-100% ее длины.
корректировала функцию (2.23), приближая ее к линейной. Практически шкала линейна на участке 25-100% ее длины.
В амперметрах на токи свыше 0,5 ампер катушки включают параллельно. Для схемы с параллельным включением I1 =k1I, I2 = k2I, где I1 и I2 – токи в катушках, k1 и k2 – коэффициенты пропорциональности.
Угол отклонения подвижной части амперметра при этом равен
 .
.
Изменение пределов измерения чаще всего производится путём включения неподвижных катушек последовательно или параллельно. Для расширения пределов измерения используют измерительные трансформаторы тока. Электродинамические вольтметр ы состоят из амперметров при последовательном соединении подвижной и неподвижных катушек и добавочного сопротивлени я, соединённого последовательно. В многопредельных вольтметрах используется секционированный добавочный резистор.
Для измерения мощности в электродинамических (ферродинамических) приборах используется независимое включение катушек (рисунок 2.11).
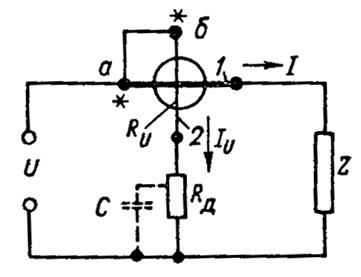
Рисунок 2.11
В этом случае неподвижные катушки 1 включают последовательно с нагрузкой Z, на которой измеряется потребляемая мощность. Подвижная катушка 2 с добавочным резистором RД включается параллельно нагрузке. На основании выражения (2.20) для ваттметра работающего на постоянном токе
 ,
,
где  - измеряемая мощность,
- измеряемая мощность,
 - чувствительность.
- чувствительность.
При работе в цепях переменного тока угол отклонения определится из (2.22)
 ,
,
где  - активная составляющая полной измеряемой мощности,
- активная составляющая полной измеряемой мощности,
 - чувствительность.
- чувствительность.
Изменение пределов измерения в небольших пределах осуществляется изменением величины добавочного сопротивления подвижной катушки. Для измерения мощности при больших напряжениях и токах применяют измерительные трансформаторы напряжения и тока.
Индукционные приборы
Принцип действия индукционных измерительных механизмов основан на взаимодействии магнитных потоков электромагнитов и вихревых токов, индуктированных магнитными потоками в подвижной части, выполненного в виде алюминевого диска (рисунок 2.12)
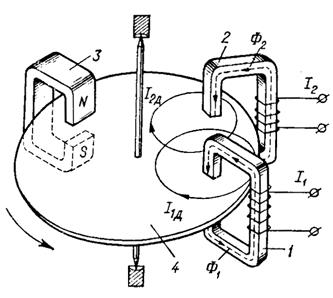
Рисунок 2.12
Магнитные потоки Ф1 и Ф2 электромагнитов 1 и 2, создаваемые переменными токами I 1 и I 2 пронизывают алюминевый диск 4 подвижной части, расположенный в зазорах магнитопровода и наводят в диске соответственно токи I 1Д и I 1Д. Анализ работы прибора показывает, что вращающий момент пропорционален произведению переменных составляющих токов I 1 и I 2
M вр = k f I1I2 sin j, (2.24)
где k – коэффициент пропорциональности,
f – частота токов I 1 и I 2,
j - фазовый сдвиг между токами.
Из (2.24) следует, что вращающий момент, а, следовательно, и показания пропорциональны действующему значению тока подаваемого на прибор. Постоянным магнитом 3 и диском 4 осуществляется магнитоиндукционное успокоение подвижной части. Применяются индукционные приборы в интегрирующих приборах (счетчиках электрической энергии переменного тока). Действительно, подключая одну из катушек электромагнитов последовательно с нагрузкой, а другую катушку к источнику напряжения U, получим
M вр = k f U I cos j,
где U I cos j = Pa – активная мощность, выделяемая на нагрузке.






