Тема: Спроектировать привод к мешалке реактора
Задание на выполнение курсового проекта по механике
Исходные данные:
Мощность на рабочем валу машины - N р.в.=10 кВт
Скорость рабочего вала машины - nр.в.=32 об/мин
Скорость вращения электродвигателя - nс =750 об/мин
ПВ=100 %
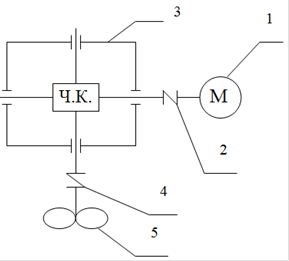
Рис.1.1.Кинематическая схема привода.
Введение
Приводы в химическом машиностроении многообразны по конструкции и различаются в зависимости от вида машины. Привод - устройство для приведения в действие машин от двигателя через передаточные механизмы. Соединение вала машины с валом электродвигателя возможно лишь в относительно редких случаях. Однако в химическом машиностроении это имеет место. В основном для привода машины необходима установка повышающей или понижающей передачи. Оптимальный тип передачи определяют с учетом ряда факторов: эксплуатационных условий, характера нагрузки, срока службы, техники безопасности, удобства расположения, обслуживания, стоимости привода.
Наиболее совершенным и прогрессивным является индивидуальный привод, т.к. он устраняет потери энергии в трансмиссиях, допускает наиболее рациональное размещение узлов, агрегатов машин, улучшает условия труда. Индивидуальный привод к рабочему валу машины осуществляется разными вариантами, в которые входят электродвигатель, открытые передачи, редуктор, муфты. Редуктор предназначен для уменьшения частоты вращения и увеличения вращающегося момента. В корпусе редуктора размещены зубчатые или червячные передачи, неподвижно закрепленные на валах. Обычно в червячной передаче ведущим является червяк. Валы опираются на установленные в корпус подшипники.
Червяки проектируются однозаходные и многозаходные, в основном с правым направлением витка. С увеличением числа витков червяка возрастает угол подъема винтовой линии, что повышает КПД передачи. Червячные передачи характеризуются большими скоростями скольжения в месте контакта червяка и червячного колеса.
Оптимизация выбора привода
Так как в исходных данных проекта известны скорость вращения рабочего вала машины и вала электродвигателя, определим ориентировочно общее передаточное отношение
Uпр. = nс/nр.в.
Uпр = 750/32 = 23,44
Особенностью заданного привода является вертикальное расположение рабочего вала, поэтому принимаем, что привод состоит из червячного редуктора с боковым расположением червяка.
Таким образом, кинематическая схема привода состоит из электродвигателя 1 типа 4А, соединительных муфт 2,4, редуктора 3, и мешалки 5, см. рис. 1.1.
Кинематический расчет привода и выбор электродвигателя
Определение КПД привода
η = ηчп · ηп2 ,
где ηчп = 0.99 - КПД червячной передачи [1 с.40];
ηп = 0.995 - КПД пары подшипников.
η = 0.88 · 0.9952 = 0.776
Определим расчетную мощность электродвигателя
Nэлр = Nр.в. /η,
Nэлр = 10/0.776 = 12.9 кВт.
Выбираем электродвигатель
Зная nс = 750 об/мин
Nэлр = 12.9 кВт.
По ГОСТ 19523-81 принимаем электродвигатель 4А180М8УЗ, рис.2.1. табл. 2.1, Nэл = 15кВт, S = 2.6% [1 с.43]. Электродвигатель будет работать с недогрузкой
- 100%
X = 1290/15 = 86%,
- X%
которая составляет 14%, что вполне допустимо, так как<15%.
Определяем асинхронную частоту вращения электродвигателя
nас = nс· (1- (S%/100));
nас = 750 · (1- (2.6/100)) =730 об/мин.

| Тип двигателя
| Число полюсов
| Габаритные размеры, мм.
| Установочные присоединительные размеры, мм.
| Масса, кг.
|
|
|
| l30
| l32
| h31
| d30
| l1
| l2
| l10
| l31
| d1
| d2
| d10
| d33
| b1
| b2
| b10
| h
| h1
| h2
| h5
| h6
| h10
|
|
| 4А180М
| 4,6,8
| 702
| 818
| 470
| 410
| 110
| 110
| 241
| 121
| 48
| 48
| 15
| 42/36
| 14
| 14
| 279
| 180
| 9
| 9
| 51.5
| 51.5
| 20
| 185
|
Определяем момент на валах привода
M1 = Mэл = 30 · Nэлр/π · nас;
M1 = 30 · 12900/3.14 · 730 = 168.8 Н·м;
M2 = M1 · Uпр.’· ηчп · ηп2;
M2 = 168.8 · 22.4 · 0.88 · 0.9952 = 2936 Н·м.
Определяют КПД передачи
η = (0.95-0.96)·tg  /tg( +
/tg( +  );
);
η = (0.95-0.96)·tg9006’/tg(9006’+1020’) = 0.82,
где = 1020’ - приведенный угол трения [1 с.98].
Уточняем передаваемый момент;
M1 = M2/Uпр.’·η;
M1 = 2936/22.4·0.82 = 159.8 Н·м;
Быстроходный вал - червяк
d = 16.4·4√ Nэлр/n1·[  0];
0];
где [ 0] = 0.50 - допускаемый угол закручивания на 1м длины вала [1 c.104],
d = 16.4·4√ 12.9·103/730·0.5 = 40 мм;
Чтобы ведущий вал редуктора можно было соединить с помощью стандартной муфты с валом электродвигателя dдв = 55 мм [2 c.391],
принимаем диаметр выходного конца dв1 = 60 мм,
диаметр вала под уплотнением dу1 = 70 мм,
диаметр вала под подшипником dп1 = 75 мм.
Тихоходный вал
червячный вал электродвигатель привод
d = 16.4·4√ 12.9·103/33·0.5 = 86 мм;
принимаем диаметр выходного конца dв3 = 85 мм,
диаметр под уплотнитель dу3 = 90 мм,
диаметр под подшипник dп3 = 95 мм,
диаметр под колесом dк3 = 100 мм.
Предварительный выбор подшипников
Предварительно назначаем радиально - упорные конические ролика - подшипники средней серии № 27215 - для быстроходного вала и легкой серии № 7219 - для тихоходного вала по ГОСТ 333 - 79.
| N
| d мм
| D мм
| B мм
| C кН
| C0 мм
| e
| Y
|
| 27315
| 75
| 160
| 37
| 119
| 95.1
| 0.826
| 0.726
|
| 7219
| 95
| 170
| 32
| 168
| 131
| 0.41
| 1.48
|
Быстроходный вал
Эквивалентная нагрузка
Осевые составляющие реакций опор;
Sa = 0.83 · e · A = 0.83 · 0.826 · 4240 = 2907 H;B = 0.83 · e · B = 0.83 · 0.826 · 1657 = 1136 H;
Результирующие осевые нагрузки;
FaA = SA = 2907 H;
FaB = SA + Fa = 2907 + 13048 = 15955 H;
Проверяем подшипник А.
Отношение Fa / Fr = 3019 / 4240 = 0.71 < e; следовательно X = 1, Y = 0 [1 c.117].
P = (X · V · A + Y · Fa) · Kб · Kт = 4240 · 1.1 = 4664 H;
X = 1 - коэффициент радиальной нагрузки;
V =1 - вращается внутреннее кольцо подшипника [1 с.117];
Kт = 1.1 - коэффициент безопасности [1 с.119];
Kт = 1 - работа при t < 1000 [1 с.119];
Проверяем подшипник B.
Отношение Fa / Fr = 16067 / 1657 = 9.7 > e; следовательно X = 0.45, Y = 0.858 [1 c.117].
P = (X·V·B+Y·Fa)·Kб·Kт=(0.45·1657+0.858·16067)·1.1==4664H;
Тихоходный вал
Эквивалентная нагрузка
Осевые составляющие реакций опор;
Sc = 0,83·е·С = 0.83·0.41·12957 = 4409 Н;
SD = 0.83 · 0.41 · 14683 = 4997 Н;
Результирующие осевые нагрузки;
FaС = SС = 4409 Н;
FaD = SС + Fa = 4997 + 2556 = 7553 H;
Проверяем подшипник C.
Отношение; Fa/Fr = 4409/12957 = 0.34 < е; следовательно Х = 1 Y = 0 [1 c.117];
Р = 12957 · 1.1 = 14253 Н;
Проверяем подшипник D.
Отношение; Fa/Fr = 7553/14683 = 0.51 > е; следовательно Х = 0.45 Y = l.48 [1 c.117];
Р = (0.45 · 14683 +1.48 · 7553) · 1.3 = 19564 Н;
Допускаемая стрела прогиба
[f] = (0.005 + 0.01) · m = (0.005+0.01) · 10 = 0.05  0.1 мм; Условие f < [f] выполнено.
0.1 мм; Условие f < [f] выполнено.
Выбор шпонки
Для соединения валов с деталями выбираем призматические шпонки по ГОСТ 23360-78 [2 c.169].
Напряжение смятия шпонки;
σcм =  < [σ]см = 100 МПа [2 c.170],
< [σ]см = 100 МПа [2 c.170],
где 1 - длина шпонки;
b - ширина шпонки;
t1- глубина паза вала.
Быстроходный вал
Шпонка на выходном конце ведущего вала b  h l = l4 9 50 мм;
h l = l4 9 50 мм;
σcм =  = 59.5 МПа;
= 59.5 МПа;
Тихоходный вал
Шпонка под колесом b h l = 28 16 140 мм;
σcм =  = 87.4 МПа;
= 87.4 МПа;
Шпонка на выходном конце b h l = 22 14 160 мм;
σcм =  = 83.4 МПа;
= 83.4 МПа;
Условие σcм < [σ]см выполняется во всех случаях.
Смазка редуктора
Смазка червячного зацепления осуществляется окунанием колеса в масляную ванну.Объем масляной ванны.
V = (0.5 ÷ 0.8)·N = (0.5 ÷ 0.8) ·12.9 ≈ 7 л.
Рекомендуемое значение вязкости масла:
при Vс = 4.7 м/с - υ = 20·10-6 м2/с,
по этой величине выбираем масло индустриальное И-20А [2 c.253].
Смазка подшипниковых узлов осуществляется благодаря разбрызгиванию масла червячным колесом.
Толщина фланцев
b = 1.5·δ = 1.5·12 = 18 мм.
Толщина нижнего пояса
р = 2.35·δ = 2.35·12 = 28 мм.
Толщина ребер
m = b = 12 мм.
Диаметр болтов
фудаментых d1= 0. 036·aw+12 = 0,036·280+12 = 22 мм, примем болты М20;
болты у подшипников d2 = 0.75·d1 = 0.75·20 = 15 мм, примем болты М16;
болты, соединяющие крышку с корпусом d3 = 0.6·d1 = 0.6·20 = 12 мм, примем болты М12
Подбор и проверка муфт
Для передачи вращающего момента с вала электродвигателя на ведущий вал редуктора и с ведомого вала на вал мешалки используем упругую втулочно-пальцевую муфты по ГОСТ 21424-75, для которых допускаемые передаваемые моменты:
[M]1 = 500 Н·м,
[M]2 = 8000 Н·м.
Расчетный момент:
Mр1= k·M1 = 1,5·168.8 = 253.2 Н·м < [M]l
где к = 1,5 - коэффициент эксплуатации.
Mр2 = k·M2 = 1,5·2936 = 4404 Н·м < [M]2,
Список используемой литературы
1. Киселёв Б.Р. Проектирование приводов машин химического производства. - Иваново.: ИГХТУ, 1987.
. Чернавский С.А. Курсовое проектирование деталей машин. -М.: Машиностроение, 1987.
. Шейнблер А.Е. Курсовое проектирование деталей машин. -М.: Высш. шк., 1991.
. Анурьев В.И. Справочник конструктора - машиностроения. Т3. -М.: “Машиностроение”, 1978.
Тема: Спроектировать привод к мешалке реактора
Задание на выполнение курсового проекта по механике
Исходные данные:
Мощность на рабочем валу машины - N р.в.=10 кВт
Скорость рабочего вала машины - nр.в.=32 об/мин
Скорость вращения электродвигателя - nс =750 об/мин
ПВ=100 %
Рис.1.1.Кинематическая схема привода.
Введение
Приводы в химическом машиностроении многообразны по конструкции и различаются в зависимости от вида машины. Привод - устройство для приведения в действие машин от двигателя через передаточные механизмы. Соединение вала машины с валом электродвигателя возможно лишь в относительно редких случаях. Однако в химическом машиностроении это имеет место. В основном для привода машины необходима установка повышающей или понижающей передачи. Оптимальный тип передачи определяют с учетом ряда факторов: эксплуатационных условий, характера нагрузки, срока службы, техники безопасности, удобства расположения, обслуживания, стоимости привода.
Наиболее совершенным и прогрессивным является индивидуальный привод, т.к. он устраняет потери энергии в трансмиссиях, допускает наиболее рациональное размещение узлов, агрегатов машин, улучшает условия труда. Индивидуальный привод к рабочему валу машины осуществляется разными вариантами, в которые входят электродвигатель, открытые передачи, редуктор, муфты. Редуктор предназначен для уменьшения частоты вращения и увеличения вращающегося момента. В корпусе редуктора размещены зубчатые или червячные передачи, неподвижно закрепленные на валах. Обычно в червячной передаче ведущим является червяк. Валы опираются на установленные в корпус подшипники.
Червяки проектируются однозаходные и многозаходные, в основном с правым направлением витка. С увеличением числа витков червяка возрастает угол подъема винтовой линии, что повышает КПД передачи. Червячные передачи характеризуются большими скоростями скольжения в месте контакта червяка и червячного колеса.
Оптимизация выбора привода
Так как в исходных данных проекта известны скорость вращения рабочего вала машины и вала электродвигателя, определим ориентировочно общее передаточное отношение
Uпр. = nс/nр.в.
Uпр = 750/32 = 23,44
Особенностью заданного привода является вертикальное расположение рабочего вала, поэтому принимаем, что привод состоит из червячного редуктора с боковым расположением червяка.
Таким образом, кинематическая схема привода состоит из электродвигателя 1 типа 4А, соединительных муфт 2,4, редуктора 3, и мешалки 5, см. рис. 1.1.






