Основы ТАУ
Основные понятия ТАУ (теории автоматического управления)
Любой физический процесс, протекающий в какой-либо технологической установке, машине, аппарате, агрегате и т.д. можно охарактеризовать значениями одного или нескольких параметров. Это могут быть температура на выходе из печи, расход сырья в колонну и т.п. Для того чтобы обеспечить нормальный режим работы технологического объекта, на эти параметры накладываются ограничения. Они либо должны сохранять постоянные значения, либо изменяться по некоторому закону вне зависимости от внешних возмущений.
Автоматическое регулирование – поддержание постоянного значения некоторой физической величины или изменение ее по некоторому возможно заранее неизвестному закону с помощью автоматических устройств.
Объект регулирования (управления) ОУ – машина, аппарат, агрегат в котором производится регулирование.
Регулируемая величина – физическая величина, которая подлежит регулированию.
Автоматический регулятор – совокупность устройств, обеспечивающих процесс регулирования без участия человека.
Автоматическая система регулирования АСР – совокупность объекта регулирования (управления) и регулятора.
АСР = ОУ + Р
Задающее воздействие (задание) – требуемое значение регулируемой величины, которое должен поддерживать регулятор.
Ошибка регулирование (рассогласование) – разность между заданным и действительным значениями регулируемой величины.
Возмущающее воздействие (возмущение) – любое внешнее воздействие на объект, вызывающее нежелательное отклонение регулируемой величины от заданного значения.
Основным возмущением всегда является изменение нагрузки на объект. Например, увеличение расхода нефти через змеевик трубчатой печи приводит к уменьшению ее температуры на выходе. Регулятор автоматически увеличит расход топлива к горелкам и вернет температуру к прежнему значению.
Управляющее (регулирующее) воздействие – воздействие, оказываемое регулятором на объект для компенсации действия возмущения.
Примеры АСР:
в быту: АСР температуры в электрическом чайнике, холодильнике, утюге, АСР расхода подаваемой воды в стиральной машине и АСР уровня в бачке в туалете
в авиации и в мореплавании: изменение курса самолета либо корабля по заданному закону,
в промышленности: АСР уровня в емкости, колонне и т.п., температура потока, расход потока, скорость вращения двигателя насоса, регулирования напряжения дуги.
Принципы регулирования
В АСР используются два основных принципа регулирования:
регулирование по отклонению (принцип Ползунова-Уатта);
регулирование по возмущению (принцип Понселе).
Регулирование по отклонению
АСР по отклонению составляют подавляющее большинство АСР применяемых в промышленности. Основная особенность АСР по отклонению – наличие отрицательной обратной связи (ООС).
Рассмотрим пример АСР уровня
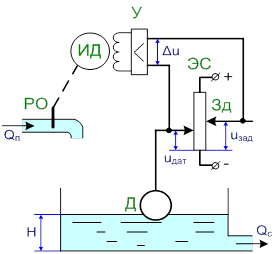
ОУ – емкость.
Регулируемая величина – уровень.
Возмущающее воздействие – величина стока.
Управляющее воздействие – величина притока, с помощью него можно поддержать уровень.
Величина уровня измеряется с помощью поплавка (датчика). Поплавок жестко связан штоком с левым движком реохорда. А задание (Зд) устанавливается правым движком.
Если ошибка регулирования равна нулю, то есть регулируемая величина равна заданию, то положение движков реохорда совпадает и разность напряжений между ними равна нулю (∆u=0).
При изменении стока происходит изменение уровня, поплавок меняет положение, а вместе с ним движется левый движок реохорда. При этом появляется ошибка регулирования в виде ∆u=uзад-uдат. ∆u подается на вход электронного усилителя (У), где усиливается и подается на обмотку управления исполнительный двигателя (ИД). В зависимости от знака ∆u двигатель вращается в ту или другую сторону, перемещая регулирующий орган РО (задвижку) и изменяя при этом величину притока до тех пор пока ∆u не станет равным нулю, то есть H=Hзад.
(Qп=Qс, а H=Hзад.)
На объект могут действовать и другие возмущения. Однако, при появлении отклонения уровня от заданного значения, вне зависимости от причины (возмущения) вызвавшей это отклонение, регулятор начинает работать.
Таким образом, регулятор реагирует только на отклонение регулируемой величины от задания.
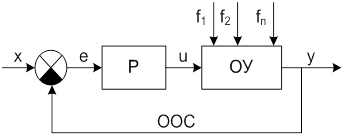
Изобразим функциональную схему АСР по отклонению, рис.

На схеме обозначены
x – задание, в рассматриваемом примере (x=uзад)
y – регулируемая величина, уровень (H)
e – ошибка регулирования, рассогласование.
На схеме выделен элемент сравнения ЭС. Таким образом, принято обозначать сумматор. Входящие стрелки показывают суммируемые сигналы, выходящая стрелка – результат. Если стрелка входит в заштрихованную область, то сигнал суммируется со знаком «-».
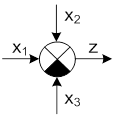 z=x1+x2-x3
z=x1+x2-x3
По сравнению с предыдущей схемой, здесь добавлено управляющее устройство УУ (или собственно регулятор), которое анализирует знак ошибки e, ее величину и, возможно, скорость изменения и по тому или иному закону вырабатывает управляющий сигнал на ИД. На схеме представлены основные элементы АСР. В реальных АСР некоторые из указанных элементов могут отсутствовать, некоторые конструктивно объединяться в один элемент (например, задающее устройство часто конструктивно объединено с регулятором).
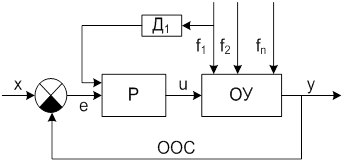
Для удобства исследования схему часто упрощают. Исполнительный двигатель, регулирующий орган и датчик вводят в состав объекта. В результате получаем укрупненную схему АСР, изображенную на рисунке
Входными сигналами при исследованиях считаются x, f1, f2,… fn
Выходными сигналами – y и e.
АСР по отклонению является замкнутой системой с отрицательной обратной связью.
Она получила наиболее широкое распространение в промышленности, так как она реагирует на любые возмущения, которые отклоняют регулируемую величину от заданного значения. К недостаткам АСР по отклонению следует отнести некоторую инерционность, так как АСР реагирует не на причину – возмущение, а на следствие – отклонение, которое появляется не мгновенно, а, как правило, через некоторое время.
Регулирование по возмущению
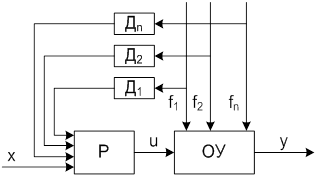
Рассмотрим функциональную схему регулирования по возмущению
АСР работает следующим образом.
Возмущения f1, f2,… fn измеряются датчиками Д1, Д2, … Дn, сигналы от датчиков поступают в регулятор. Регулятор вырабатывает управляющее воздействие для компенсации действия возмущений. В отличии от АСР по отклонению, АСР по возмущению реагирует не на следствие, а на причину – возмущение. Это обеспечивает более высокое быстродействие системы.
АСР реализует принцип регулирования Понеселе.
Она является разомкнутой, так как не имеет обратной связи. Из-за отсутствия обратной связи (нет контроля за регулируемой величиной) могут возникать значительные отклонения регулируемой величины. По этой причине разомкнутые АСР используют редко. Кроме того, при наличии большого числа возмущений требуется большое число датчиков, что экономически не всегда оправдано.
Рассмотрим пример АСР уровня по возмущению
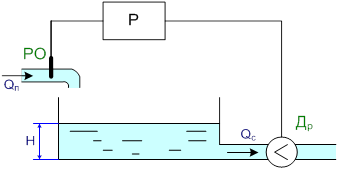
ОУ – емкость.
Регулируемая величина – уровень.
Возмущающее воздействие – величина стока.
Управляющее воздействие – величина притока.
АСР работает следующим образом.
Сигнал от датчика расхода Др (возмущения) поступает в регулятор. Регулятор перемещает регулирующий орган РО (заслонку), изменяя приток, обеспечивает равество Qп=Qс, так как только в этом случае уровень постоянен. Так как любые измерения осуществляются с ошибкой, то в действительности Qп≠Qс и уровень может сильно измениться.
Классификация АСР
Существует большое количество АСР, отличающихся друг от друга по различных признакам. Для удобства анализа АСР классифицируют.
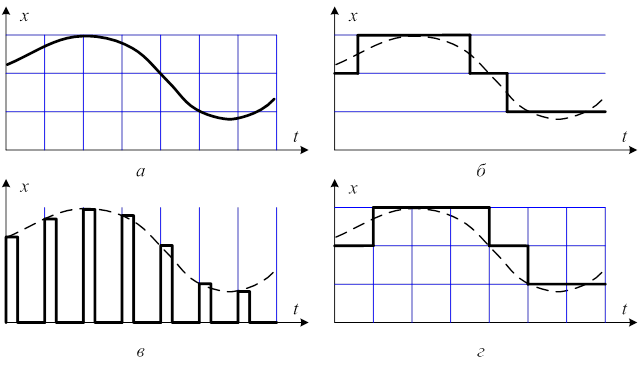
Непрерывные и дискретные
В зависимости от прохождения и характера сигнала в системе автоматического управления они делятся на непрерывные и дискретные (прерывистые).
В непрерывных сигналы изменяются непрерывно, и обратная связь осуществляется непрерывно.
В дискретных системах часть сигналов имеет дискретный характер – квантуются.
Дискретные:
релейные – квантование по уровню сигнала, означает, что сигнал может принимать только определенные значения;
импульсные – квантование по времени, означает, что сигнал изменяется в только определенные моменты времени
цифровые – квантование по уровню и по времени.
Основные задачи ТАУ
В курсе ТАУ рассматриваются 3 основные задачи:
- Задача анализа
Задача АСР, необходимо оценить поведение системы при различных возмущающих и задающих воздействиях.
Разработка метода анализа.
- Задачи синтеза
Задан объект управления, входные и выходные сигнала.
Заданы требования к качеству регулирования проектируемой системы.
Необходимо спроектировать регулятор, обеспечивающих выполнения заданных требований.
- Задачи идентификации модели.
Для решения первых двух задач нужны модели объекта регулирования.
Под моделью понимается совокупность уравнений, позволяющих по входным сигналам рассчитать выходные.
Основы ТАУ
Основные понятия ТАУ (теории автоматического управления)
Любой физический процесс, протекающий в какой-либо технологической установке, машине, аппарате, агрегате и т.д. можно охарактеризовать значениями одного или нескольких параметров. Это могут быть температура на выходе из печи, расход сырья в колонну и т.п. Для того чтобы обеспечить нормальный режим работы технологического объекта, на эти параметры накладываются ограничения. Они либо должны сохранять постоянные значения, либо изменяться по некоторому закону вне зависимости от внешних возмущений.
Автоматическое регулирование – поддержание постоянного значения некоторой физической величины или изменение ее по некоторому возможно заранее неизвестному закону с помощью автоматических устройств.
Объект регулирования (управления) ОУ – машина, аппарат, агрегат в котором производится регулирование.
Регулируемая величина – физическая величина, которая подлежит регулированию.
Автоматический регулятор – совокупность устройств, обеспечивающих процесс регулирования без участия человека.
Автоматическая система регулирования АСР – совокупность объекта регулирования (управления) и регулятора.
АСР = ОУ + Р
Задающее воздействие (задание) – требуемое значение регулируемой величины, которое должен поддерживать регулятор.
Ошибка регулирование (рассогласование) – разность между заданным и действительным значениями регулируемой величины.
Возмущающее воздействие (возмущение) – любое внешнее воздействие на объект, вызывающее нежелательное отклонение регулируемой величины от заданного значения.
Основным возмущением всегда является изменение нагрузки на объект. Например, увеличение расхода нефти через змеевик трубчатой печи приводит к уменьшению ее температуры на выходе. Регулятор автоматически увеличит расход топлива к горелкам и вернет температуру к прежнему значению.
Управляющее (регулирующее) воздействие – воздействие, оказываемое регулятором на объект для компенсации действия возмущения.
Примеры АСР:
в быту: АСР температуры в электрическом чайнике, холодильнике, утюге, АСР расхода подаваемой воды в стиральной машине и АСР уровня в бачке в туалете
в авиации и в мореплавании: изменение курса самолета либо корабля по заданному закону,
в промышленности: АСР уровня в емкости, колонне и т.п., температура потока, расход потока, скорость вращения двигателя насоса, регулирования напряжения дуги.
Принципы регулирования
В АСР используются два основных принципа регулирования:
регулирование по отклонению (принцип Ползунова-Уатта);
регулирование по возмущению (принцип Понселе).
Регулирование по отклонению
АСР по отклонению составляют подавляющее большинство АСР применяемых в промышленности. Основная особенность АСР по отклонению – наличие отрицательной обратной связи (ООС).
Рассмотрим пример АСР уровня
ОУ – емкость.
Регулируемая величина – уровень.
Возмущающее воздействие – величина стока.
Управляющее воздействие – величина притока, с помощью него можно поддержать уровень.
Величина уровня измеряется с помощью поплавка (датчика). Поплавок жестко связан штоком с левым движком реохорда. А задание (Зд) устанавливается правым движком.
Если ошибка регулирования равна нулю, то есть регулируемая величина равна заданию, то положение движков реохорда совпадает и разность напряжений между ними равна нулю (∆u=0).
При изменении стока происходит изменение уровня, поплавок меняет положение, а вместе с ним движется левый движок реохорда. При этом появляется ошибка регулирования в виде ∆u=uзад-uдат. ∆u подается на вход электронного усилителя (У), где усиливается и подается на обмотку управления исполнительный двигателя (ИД). В зависимости от знака ∆u двигатель вращается в ту или другую сторону, перемещая регулирующий орган РО (задвижку) и изменяя при этом величину притока до тех пор пока ∆u не станет равным нулю, то есть H=Hзад.
(Qп=Qс, а H=Hзад.)
На объект могут действовать и другие возмущения. Однако, при появлении отклонения уровня от заданного значения, вне зависимости от причины (возмущения) вызвавшей это отклонение, регулятор начинает работать.
Таким образом, регулятор реагирует только на отклонение регулируемой величины от задания.
Изобразим функциональную схему АСР по отклонению, рис.
На схеме обозначены
x – задание, в рассматриваемом примере (x=uзад)
y – регулируемая величина, уровень (H)
e – ошибка регулирования, рассогласование.
На схеме выделен элемент сравнения ЭС. Таким образом, принято обозначать сумматор. Входящие стрелки показывают суммируемые сигналы, выходящая стрелка – результат. Если стрелка входит в заштрихованную область, то сигнал суммируется со знаком «-».
z=x1+x2-x3
По сравнению с предыдущей схемой, здесь добавлено управляющее устройство УУ (или собственно регулятор), которое анализирует знак ошибки e, ее величину и, возможно, скорость изменения и по тому или иному закону вырабатывает управляющий сигнал на ИД. На схеме представлены основные элементы АСР. В реальных АСР некоторые из указанных элементов могут отсутствовать, некоторые конструктивно объединяться в один элемент (например, задающее устройство часто конструктивно объединено с регулятором).
Для удобства исследования схему часто упрощают. Исполнительный двигатель, регулирующий орган и датчик вводят в состав объекта. В результате получаем укрупненную схему АСР, изображенную на рисунке
Входными сигналами при исследованиях считаются x, f1, f2,… fn
Выходными сигналами – y и e.
АСР по отклонению является замкнутой системой с отрицательной обратной связью.
Она получила наиболее широкое распространение в промышленности, так как она реагирует на любые возмущения, которые отклоняют регулируемую величину от заданного значения. К недостаткам АСР по отклонению следует отнести некоторую инерционность, так как АСР реагирует не на причину – возмущение, а на следствие – отклонение, которое появляется не мгновенно, а, как правило, через некоторое время.
Регулирование по возмущению
Рассмотрим функциональную схему регулирования по возмущению
АСР работает следующим образом.
Возмущения f1, f2,… fn измеряются датчиками Д1, Д2, … Дn, сигналы от датчиков поступают в регулятор. Регулятор вырабатывает управляющее воздействие для компенсации действия возмущений. В отличии от АСР по отклонению, АСР по возмущению реагирует не на следствие, а на причину – возмущение. Это обеспечивает более высокое быстродействие системы.
АСР реализует принцип регулирования Понеселе.
Она является разомкнутой, так как не имеет обратной связи. Из-за отсутствия обратной связи (нет контроля за регулируемой величиной) могут возникать значительные отклонения регулируемой величины. По этой причине разомкнутые АСР используют редко. Кроме того, при наличии большого числа возмущений требуется большое число датчиков, что экономически не всегда оправдано.
Рассмотрим пример АСР уровня по возмущению
ОУ – емкость.
Регулируемая величина – уровень.
Возмущающее воздействие – величина стока.
Управляющее воздействие – величина притока.
АСР работает следующим образом.
Сигнал от датчика расхода Др (возмущения) поступает в регулятор. Регулятор перемещает регулирующий орган РО (заслонку), изменяя приток, обеспечивает равество Qп=Qс, так как только в этом случае уровень постоянен. Так как любые измерения осуществляются с ошибкой, то в действительности Qп≠Qс и уровень может сильно измениться.
Комбинированное регулирование.
Функциональная схема приведена на рисунке
В комбинированных АСР используются оба принципа регулирования – по отклонению и по возмущению одновременно.
Основное возмущение – нагрузка, компенсируется по разомкнутому контуру, а все остальные возмущения и погрешности компенсируются за счет ООС.
Комбинированные АСР являются наиболее эффективными.
Классификация АСР
Существует большое количество АСР, отличающихся друг от друга по различных признакам. Для удобства анализа АСР классифицируют.






