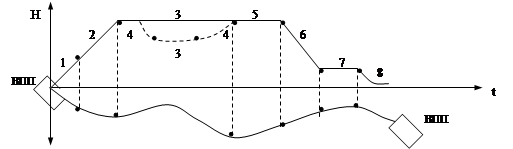
Любой самолет осуществляет полет по определенным этапам. Это:
1.- взлет;
2.-набор высоты;
3.- крейсерский полет (полет по заданному маршруту);
4.- смена высоты крейсерского полета с сохранением скорости (смена эшелона);
5.- разгон или торможение на постоянной высоте;
6.- снижение с торможением;
7.- заход на посадку;
8.- полет по глиссаде посадки и приземление. См. рис.
Реализация целей этапов производится вследствие соответствующего управ-лениядвижением. Движение с-та как твердого тела характеризуется шестью степенями свободы - тремя вращательными и тремя поступательными. Каждый этап полета, каждый маневр характеризуется заданным законом изменения тех или иных фазовых координат. Поэтому управление полетом производится по принципу соответствующего регулирования фазовых координат.
Управление полетом может быть ручным, полуавтоматическим и авто- матическим. Задачи управления можно разделить на три уровня:
- обеспечение требуемой устойчивости и управляемости;
- стабилизация тех или иных фазовых координат;
- целенаправленное управление траекторией.
Процесс управления полетом определяется информационным взаимодействием при выполнении операций наблюдения, обработки информации, формировании цели системы, построения траектории и выработки сигналов управления. Бортовая система управления представляет собой человеко-машинный комплекс в составе летчика (экипажа), информационно-управляющих устройств кабины, датчиков и информационных систем, математического обеспечения БЦВМ навигационного комплекса, систем автоматического управления, реализующих принципы алгоритмизации и автоматизации режимов управления.
В основе разработки больших систем лежит концепция системного подхода и целевого управления. Использование этой концепции требует четкого представления о цели, условиях разработки и использования системы, а также о формировании критерия, позволяющего оценить степень достижения этой цели разрабатываемой системой. Концепция целевого управления требует обеспечения максимально возможного при данных условиях и ограничениях качества решения основной задачи (цели) системы в целом.
Одним из методов решения такого рода задач большой размерности является теория многоуровневого иерархического управления. Идея решения состоит в декомпозиции и формировании максимально упрощенных локальных задач, составляющих нижний уровень управления, с координацией последних для обеспечения решения основной задачи (цели) системы в целом. Ограничения и критерии качества решения частных задач различных иерархических уровней и разных локальных подсистем, входящих в бортовую систему управления, должны быть заданы так, чтобы оптимизация этих частных критериев и обеспечила максимизацию общего критерия качества работы системы в целом. Т.е. критерии качества каждого уровня иерархии должны задаваться в соответствии с «потребностями» более высокого уровня управления, т.е. исходя из более общей постановки задачи.
Выделение уровней в иерархической системе формально описывается следующим образом. Пусть система описывается векторным дифференциальным уравнением в форме Коши
 ,
,
где  - вектор координат состояния системы;
- вектор координат состояния системы;  - вектор управляющих воздействий;
- вектор управляющих воздействий;  - вектор возмущений.
- вектор возмущений.
Вектор состояния разбивают на два субвектора  . Субвектор
. Субвектор  характеризует состояние верхнего (старшего) уровня, а субвектор
характеризует состояние верхнего (старшего) уровня, а субвектор  описывает состояние нижнего или исполнительного уровня (локальной системы). Процедура деления на уровни не поддается полной формализации. Обычно к верхнему уровню относят те координаты и процессы, которые непосредственно влияют на решение главной задачи (целевой функции). Применительно к системам управления полетом характерным является выделение в качестве верхнего – траекторного уровня, нижнего – пилотажного. В результате оптимизации верхнего уровня получаются зависимости и программы, которые рассматриваются как задающие воздействия для нижнего уровня. Нижний уровень строится по принципу оптимальной в определенном смысле отработки задающих воздействий, сформированных на верхнем уровне, и представляет собой локальную систему стабилизации.
описывает состояние нижнего или исполнительного уровня (локальной системы). Процедура деления на уровни не поддается полной формализации. Обычно к верхнему уровню относят те координаты и процессы, которые непосредственно влияют на решение главной задачи (целевой функции). Применительно к системам управления полетом характерным является выделение в качестве верхнего – траекторного уровня, нижнего – пилотажного. В результате оптимизации верхнего уровня получаются зависимости и программы, которые рассматриваются как задающие воздействия для нижнего уровня. Нижний уровень строится по принципу оптимальной в определенном смысле отработки задающих воздействий, сформированных на верхнем уровне, и представляет собой локальную систему стабилизации.
1.2. Способы автоматизации процесса управления ЛА
Автоматизация процесса управления ЛА принципиально развивается в двух направления:
1. создание систем с включением летчика в контур управления;
2. разработка систем управления без участия летчика в процессе управления.
К первому направлению относятся следующие способы управления:
- ручной;
- директорный;
- комбинированный.
Ручной режим управления относится к автоматизированному управлению вследствие того, что для его функционирования используются сигналы ошибок параметров движения самолета, получаемые в бортовых вычислителях. Чисто ручное, неавтоматизированное управление обычно не используется из-за низкой точности выдерживания требуемых параметров траектории полета. В ручном режиме летчик пилотирует по первичной информации о состоянии объекта с использованием пилотажных приборов, стремясь уменьшить отклонения от траектории или ошибки прицеливания. При таком способе управления летчик полностью использует маневренные возможности самолета, осуществляет координирование усилий и расхода рулей по каналам управления в соответствии с манерой пилотирования и сложившимся «образом полета».
Недостаток ручного режима – летчик может быть перегружен задачами пилотирования.
Директорный режим управления освобождает летчика от операций по сбору и обработке информации о положении самолета, сводя задачу пилотирования к отработке команд управления по перегрузке и крену.
Достоинства:
- летчик участвует в процессе управления и постоянно готов заменить собой отказавшую автоматику, т.е. перейти к ручному пилотированию;
- сохраняются положительные качества ручного пилотирования, а именно: правильное дозирование перемещения ручки правления самолетом (РУС); рациональное распределение перегрузки по каналам управления; адаптация управления к изменяющимся условиям полета;
- существенное снижение нагрузки на летчика в сравнении с ручным режимом.
Недостатки:
- точность отработки ошибок управления (директорных сигналов) недостаточно высока;
- в сложных условиях требует повышенного внимания к командным стрелкам, при этом возрастает психо-физиологическая напряженность, что часто влечет к большим ошибкам в отработке директорных сигналов.
Автоматический режим управления - реализуется не только автоматизированный сбор и обработка информации о состоянии ЛА, но и формирование законов управления, а также сам процесс управления.Автоматический режим управления осуществляется с помощью контуров автоматической отработки заданных команд, например, по перегрузке и крену.
Достоинства:
- освобождает летчика от утомительных и монотонных операций по перемещению органов управления, работе скнопками, и переключателями, отслеживания команд управления;
- наилучшие характеристики процессов управления, отработки команд управления.
Недостаток:
- летчик не участвует в непосредственном пилотировании самолетом, необходимо значительное время на включение в процесс управления при отказах автоматических устройств управления.






