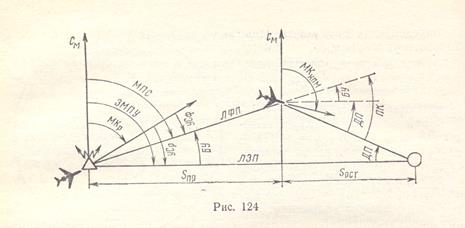
Используют, когда уклонение ВС от ЛЗП или оставшееся расстояние до КПМ (ППМ) малы. Полет выполняется в такой последовательности (рис. 27):
1. Точно пройти радиостанцию с МКр или МК=ЗМПУ.
2. Через 5—15 мин полета определить МПС: МПС = МК + КУР ± 180°;
3. Сравнением МПС с ЗМПУ определить сторону: и величину бокового уклонения: БУ = МПС - ЗМПУ;
4. По пройденному и оставшемуся расстоянию или времени определить ДП и рассчитать ПК по формулам:
ДП = Sпр/Socт· БУ ПК = БУ + ДП
или с помощью НЛ-10М (рис. 23);
5. Определить курс следования в КПМ (ППМ) и занять его:
МККПМ = МКр — (± ПК)
6. Дальнейший контроль пути по направлению осуществляется выдерживанием рассчитанного МККПМ.
Рис. 27. Исправление пути по направлению при полете от РСТ с выходом на КПМ (ППМ).
Определение места ВС.
Место ВС в полете определяется в целях контроля пути, определения навигационных элементов и восстановления потерянной ориентировки. С помощью радиокомпаса место ВС может быть определено по одной и двум радиостанциям.
Расчет истинного пеленга самолета (ВС).
Для решения некоторых навигационных задач, например, для определения места ВС, необходимо проложить на карте линию равных пеленгов самолета (ЛРПС). Для этого необходимо сначала определить пеленг самолета (ВС). Поскольку на любой карте нанесены обычные географические меридианы, называемые в навигации истинными, и именно к ним будет прикладываться транспортир, то речь идет о расчете истинного пеленга самолета (ИПС).
Очевидно, что магнитный пеленг самолета (ВС) можно определить как
МПС = МК + КУР ± 180.
Как было показано ранее, этот МПС – это направление от РНТ на ВС, измеренное от магнитного меридиана места ВС(поскольку именно от него измерен МК, используемый для расчета МПС). Но ведь на карте нужно проложить ЛРПС на карте от истинного меридиана радиостанции. Следовательно, вновь возникает задача перехода от одного меридиана (магнитного меридиана МС) к другому (истинному меридиану РНТ).
Для этого к МПС нужно прибавить магнитное склонение в точке расположения ВС (поскольку именно от меридиана МС известен МПС) и учесть угол схождения меридианов, чтобы перейти от истинного меридиана МС к истинному меридиану РНТ (при необходимости).
ИПС = МК + КУР ± 180 + ΔМ + (λр - λ) · sin φср,
где ΔМ – магнитное склонение в районе нахождения ВС;
λр - долгота радиостанции;
λ – долгота ВС;
φср – средняя широта (РНТ и ВС).
В этой формуле первые три слагаемые – это и есть МПС, отсчитанный от меридиана ВС (поскольку от него отсчитан МК). Последние два слагаемые обеспечивают переход от магнитного меридиана ВС к истинному меридиану РНТ. И еще раз подчеркнем: долгота места ВС λ присутствует в формуле вовсе не потому, что именно там находится ВС, а потому что от этого меридиана измеряется МК!
Прокладка ЛРПС на карте.
Истинный пеленг ВС - это угол между северным направлением истинного меридиана РНТ и направлением на ВС по ортодромии на земной сфере. Но если пилот собирается прокладывать ЛРПС, то он будет это делать на карте, а карта – это плоскоеизображение земной поверхности.
Как уже не раз отмечалось, на не слишком больших расстояниях ортодромию (ЛРПС) допустимо изображать на карте в виде прямой линии.
Аэронавигационные карты специально создают в таких проекциях, чтобы это было возможным. Картографическая проекция – это способ отображения сферической Земли на плоскости. По нормативам аэронавигации определение места ВС по РТС разницу в ЛРПС и ИПС можно пренебречь.
Определение места ВС по двум радиостанциям.
Определение места ВС – это полный контроль пути, поскольку если известно место ВС, то можно определить и уклонение от ЛЗП (контроль пути по направлению), и пройденное или оставшееся расстояние (контроль пути по дальности). Определять МС по двум РНТ удобно в случае, когда на борту имеется два комплекта АРК или АРК имеет возможность настройки двух комплектов на пульте управления, каждый из которых можно настроить на свою радиостанцию. Разумеется, перед определением места ВС пилот должен убедиться, что АРК правильно настроены, прослушать позывные ОПРС.
По возможности одновременно необходимо зафиксировать по приборам и записать:
- время,
- магнитный курс,
- магнитные пеленги самолета (ВС) обеих РТС (МПС1 и МПС2).
Время необходимо записать потому, что расчет и прокладка пеленгов займут определенное время и пилот, определив место ВС, должен знать к какому моменту времени это место относится – ведь ВС продолжает движение.
1. Точность определения пеленгов. Все величины, входящие в формулу для расчета ИПС = МК + КУР ± 180 + ΔМ + (λр - λ) · sin φср, не являются абсолютно точными. Погрешности определения каждой из них складываются. Точность определения курса характеризуется средней квадратической погрешностью порядка 1º, курсового угла радиостанции (или МПС) 2-3º. Не абсолютно точным является и магнитное склонение, да и долгота ВС, учитываемая при учете угла схождения меридианов. Суммарная СКП определения пеленга составляет около 3-4º.
2. У даление ВС до каждой из РНТ. Поскольку пеленги рассчитаны неточно, то и ИПС проложены не в нужном направлении. А ведь каждый градус погрешности на удалении около 60 км дает линейное смещение ИПС величиной в 1 км. Поэтому чем дальше ВС от радиостанции, тем более неточно проходит линия положения.
3. Погрешности графической работы на карте. Вообразим, что пеленги рассчитаны абсолютно точно. Значит ли это, что совершенно точным будет и место ВС на карте. Разумеется, нет. Ведь пилот будет прокладывать эти пеленги транспортиром. На какие-то доли градуса он ошибется при выравнивании транспортира по меридиану, какую-то погрешность допустит при отсчете угла. Все эти погрешности неизбежны и они являются случайными. Они добавляются к тем погрешностям, которые упоминались ранее. Эксперименты показывают, что СКП графической работы на карте при отсчете углов по транспортиру составляют около 1-2º.
4. Угол пересечения линий положения. На первый взгляд это может оказаться неожиданным, но при прочих равных условиях точность определения места ВС по двум линиям положения зависит от того под каким углом ω они пересекаются друг с другом. Точность обратно пропорциональна синусу этого угла. Поскольку максимальное значение синус имеет при ω=90º, то в этом случае при прочих равных условиях и будет достигнута максимальная точность. Если же ω=30º, то точность будет вдвое ниже (sin 30º=0,5). А если линии положения пересекаются под совсем уж острым углом, то и погрешность определения места ВС может быть громадной. В предельном случае, когда ω=0, определить МС вообще невозможно, поскольку оба ИПС совпадут, то есть «пересекутся» во всех своих точках.
Работа экипажа:
- настроить АРК на РТС, расположенную вблизи ЛЗП (при наличии);
- настроить АРК на боковую РТС;
- снять показания МПС1 от первой РТС и значение фактического времени;
- переключить АРК на боковую РТС и снять показания МПС2;
- рассчитать ИПС1 = МПС1 + ∆М;
- рассчитать ИПС2 = МПС2 + ∆М;
- проложить ИПС1 и ИПС2 на карте;
- место пересечения двух ИПС будет являться местом ВС.
Примечание: если время ∆t – между пеленгованиями не превысило более 2 минут для скорости воздушного судна до 300 км/час, то точка пересечения пеленгов будет являться местом ВС, если ∆t превысило 2 минуты, то необходимо привести пеленги к одному моменту времени. Для этого из точки пересечения пеленгов отложить ИПУ = МК + ∆М + УСф и расстояние, пройденное ВС за время между первым и вторым пеленгованием: Sпр = W∆t или Sпр = V∆t; или линию истинного курса (ИК = МК) + ∆М и расстояние на ней, пройденное ВС за ∆t, через полученную точку провести линию, параллельную линии первого пеленга. Точка пересечения этой линии с линией второго пеленга будет местом ВС в момент второго пеленгования РТС (рис. 28).
Рис. 28. Определение места ВС по двум РТС.
Определение места ВС по одной радиостанции.
В соответствии с обобщенным методом линий положения для определения места ВС необходимо дванавигационных параметра и двесоответствующие им линии положения. Казалось бы, что если радиостанция только одна, определить место ВС невозможно, поскольку в любой момент времени можно определить только один параметр (пеленг самолета (ВС)).
На самом деле определить место ВС можно и по одной радиостанции, но только благодаря тому, что ВС движется. Для неподвижного объекта (например, зависшего вертолета) этот способ не годится.
Идея способа основана на том, что во время полета пеленг изменяется и можно построить две ЛРПС, относящиеся к разным моментам времени Т1 и Т2. Очевидно, что в момент Т1 ВС находился в какой-то из точек первой ЛРПС. Если между этими моментами ВС летело с постоянным курсом, то множество точек, в которых он может находиться в момент Т2, представляет собой прямую, параллельною первой ЛРПС и смещенную от нее в ту сторону, в которую летело ВС, и на такое расстояние, которое оно пролетело за это время. Следовательно, первую ЛРПС нужно сместить параллельно самой себе. Но чтобы сместить прямую линию, достаточно сместить одну из ее точек и провести через нее параллельную линию. Таким образом первая ЛРПС как бы приводится к моменту времени Т2. И это смещение ЛРПС пересечется со второй ЛРПС в месте ВС.
Работа экипажа:
- выбрать боковую РТС;
- настроить АРК;
- отсчитать МПС1, курс и время (включить секундомер);
- выполнить полет с прежним курсом и на постоянной скорости;
- следить за изменением МПС на 200 – 300;
- вторично снять значение МПС2 и время (остановить секундомер);
- рассчитать ИПС1 = МПС1 + ∆М;
- рассчитать ИПС2 = МПС2 + ∆М;
- проложить ИПС1 и ИПС2 на карте;
- из любой точки первого пеленга отложить линию истинного путевого угла (ИПУ = МК + ∆М + УСф) и расстояние, пройденное ВС за время между первым и вторым пеленгованием: Sпр = W∆t или Sпр = V∆t;
- через конечную точку Sпр провести линию, параллельную линии первого пеленга. Точка пересечения этой линии с линией второго пеленга будет местом ВС в момент второго пеленгования (рис. 29).
На точность определения места ВС будут влиять те же факторы, которые перечислены в предыдущем параграфе. Но к ним добавятся и другие – точность расчета ИПУ и путевой скорости, дополнительная графическая работа на карте, связанная со смещением ЛРПС.
Пожалуй, такой способ определения места ВС целесообразно применять лишь в том случае, когда других способов не остается. Уж слишком неточным может оказаться результат.
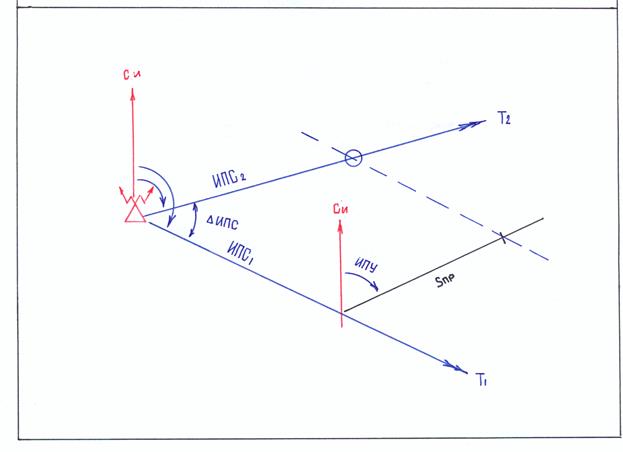
Рис. 29. Определение места ВС по одной боковой РТС.
Контроль пути по дальности.
Контроль пути по дальности – это определение пройденного или оставшегося расстояния до ППМ. Для его выполнения также можно использовать АРК и ОПРС. С помощью боковых РТС эту задачу решают пеленгованием боковой РТС и прокладкой ИПС на карте. Для повышения точности боковые РТС необходимо выбирать на удалении не более 150 км. Линия пеленга укажет, какого рубежа достигло ВС в момент пеленгования.
Точность определения этих величин будет зависеть от точности расчета пеленга, удаления до РНТ и, конечно, от того, насколько точно ВС выдерживает ЛЗП, то есть от величины ЛБУ. Выполнить такой контроль пути по дальности можно в любой момент, но заниматься в полете графической работой на карте не очень удобно (рис.30).
Оставшееся (пройденное) расстояние определяют по разнице между фактическим пеленгом и предвычисленным и расстоянием от участка маршрута до места установки РТС.
____∆МПС____________ 3 ___ ∆МПС _________ 3
_______↓________▼____ 4 _____↓ _______ ▼ ____4
____ S ост ______ S ртс __ 5 _____ S пр ____ S ртс __ 5
В уме рассчитывают по правилу: 1 км расстояния до РТС = 1о ∆МПС если до РТС 60 км, т.е., 1о ∆МПС будет соответствовать 1 км оставшемуся или пройденному расстоянию до ППМ (КО); если до РТС 30 км, то 1о ∆МПС будет соответствовать 0.5 км оставшемуся или пройденному расстоянию до ППМ (КО); если до РТС 90 км, то 1о ∆МПС будет соответствовать 1.5 км оставшемуся или пройденному расстоянию до ППМ (КО) и т.д. (рис.31).

Рис. 30. Контроль пути по дальности по РТС.
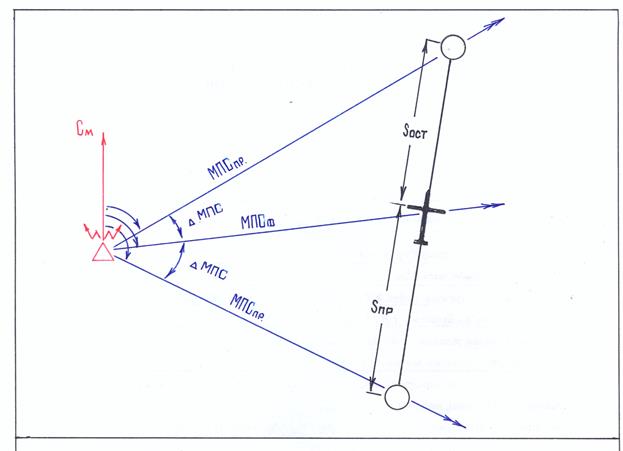
Рис. 31. Контроль пути по дальности по РТС с использованием предвычисленного пеленга.
На практике чаще возникает противоположная задача: нужно определить момент пролета определенной точки на ЛЗП, например, пункта обязательного донесения (ПОД) или поворотного пункта маршрута (ППМ). Для этого вряд ли разумно каждую минуту прокладывать на карте пеленги, дожидаясь, пока одна из ИПС не пройдет, наконец, через нужную точку. Легче сделать наоборот: рассчитать, какой будет пеленг при пролете этой точки и дождаться, когда прибор покажет рассчитанное значение. Такие пеленги называют предвычисленными, поскольку их определяют заранее, еще до полета в удобных условиях штурманской комнаты. Предвычисленные значения можно надписать прямо на карте возле соответствующих пунктов.
Рис. 32. Предвычисленный пеленг радиостанции.
Поскольку на приборах индицируются магнитныепеленги, целесообразно рассчитать МПРпредв. Для этого нужно транспортиром на карте измерить ИПРпредв, то есть угол между истинным меридианом ПОД (ППМ) и направлением от него на РНТ (рис. 32). Для перехода от ИПРпредв к МПРпрев необходимо вычесть магнитное склонение в районе ПОД (ППМ).
Определение навигационных элементов полета.
Определение угла сноса с помощью АРК.
При выполнении контроля пути по направлению с использованием АРК можно также определить такой важный навигационный элемент, как угол сноса.
Рассматриваемый способ применим в тех случаях, когда:
- ВС достаточно точно пролетело начальный ППМ участка;
- ВС после пролета ППМ следовало с постоянным курсом.
Чем точнее выполнены эти условия, тем точнее будет определен УС.
Угол сноса – это угол между векторами истинной воздушной скорости и путевой скорости Вектор Vи направлен по продольной оси ВС. Это направление является курсом и оно, конечно, всегда известно. Вектор путевой скорости направлен по ЛФП. Это направление тоже можно определить, зная начальное МС (предполагается, что находилось в ППМ) и текущее место ВС.
После пролета ППМ или контрольного ориентира (КО) пилот обычно берет расчетный курс следования МКр с учетом некоторого расчетного угла сноса УСр, МК р = ЗМПУ - УСр.
Расчетный угол сноса УСр – этот тот угол сноса, который, как предполагал пилот, будет иметь место на данном участке маршрута и который пилот учел при расчете выдерживаемого курса. Он может быть заранее рассчитан по известному ветру (определенному в полете в полете или прогностическому).
Если бы фактический угол сноса УСф совпадал с расчетным, то ВС следовало бы по ЛЗП без уклонений. Если же УСф отличается от учтенного пилотом УСр, то ЛФП не будет совпадать с ЛЗП и ВС уклонится от ЛЗП. Поскольку по условию курс выдерживался постоянным, то ВС будет лететь по прямой. Следовательно, прямая, соединяющей начальный ППМ (КО) с текущим местом ВС, и является ЛФП.
Очевидно, что боковое уклонение БУ (угол между ЛЗП и ЛФП) – это и есть погрешность в определении УС пилотом. При взятии расчетного курса часть фактического угла сноса пилот уже учел (это УСр), а часть его осталась неучтенной. Она и привела к уклонению БУ. Следовательно, фактический УСф складывается из этих двух частей (учтенной и неучтенной):
УС ф = УСр + БУ, БУ = МПС – ЗМПУ.
Эта формула является достаточно общей и не зависит от того, каким способом было определено значение БУ (с помощью РТС, визуально или другим способом). Не имеет значения и то, насколько пилот ошибся в предполагаемом УСр, какой именно курс МКр он выдерживал. Величина, названная здесь УСр, на самом деле не обязана быть именно углом сноса, который предполагал пилот. Это просто разность выдерживаемого курса и заданного путевого угла. То есть величина, на которую пилот отвернул продольную ось ВС от ЛЗП для следования по ней.
Пример 1.
ЗМПУ=133, пилот выдерживал курс МКр=137. Через некоторое время полета пилот определил, что БУ= -2.
Сравнивая МКр и ЗМПУ можно видеть, что пилот взял курс на 4º больше, чем ЗМПУ, то есть отвернул продольную ось ВС вправоот ЛЗП. Следовательно он предполагал, что ВС будет сносить на 4 º влевои тогда ВС как раз полетит по ЛЗП. Поэтому данном случае УСр= - 4.
Тогда УСф = УСр + БУ = - 4 + (-2) = - 6.
Таким образом на самом деле угол сноса был - 6º. Из них 4º пилот учел при взятии расчетного курса, а 2º остались неучтенными и привели к боковому уклонению.
Пример 2.
ЗМПУ = 250, МКр = 230.
Через некоторое время полета пилот определил, что БУ= - 12º.
В данном случае пилот отвернул продольную ось от ЛЗП на 20 влево, получается, что УСр = + 20 и тогда УСф = + 20 + (-12) = + 8.
Очевидно, что при решении этой задачи не имеет значения, каким именно способом определено значение БУ. Как правило, оно определяется с помощью радиотехнических средств. При полете от РНТ – путем сравнения МПС и ЗМПУ, при полете на РНТ – путем расчета на основе известного значения ДП.
Но при полете именно от РНТ определить фактический угол сноса можно еще проще: УС ф = КУР – 180 или УС ф = МПС - МКр.
Это следует из рис. 33, в котором, конечно, также предполагается, что ВС пролетело начальный ППМ (КО) и далее следовало с постоянным курсом.
Рис. 33. Определение УС при полете от РНТ.
На практике, конечно, определять УСф удобнее не по КУР, а по МПС при полете от РНТ. После пролета РНТ пилот выдерживает МК постоянным, курсозадатчик устанавливается на ЗМПУ и сравнивается МПС с ЗМПУ, разница между этими величинами и будет являться УСф.
Определение путевой скорости с помощью АРК.
Определение путевой скорости возможно при условии, что РНТ находится сбоку от ВС, желательно на КУР = 60о – 120о или 240о – 300о. В этом случае пилот на начальном значении КУР или МПС включает секундомер и выдерживает МК и скорость постоянной в течение времени пока КУР или МПС не изменится до второго значения КУР или МПС. В момент прохождения второго значения снимаемого КУР или МПС останавливает (снимает значение времени) секундомер. Теперь необходимо выполнить расчеты, учитывая такой параметр, как удаление участка маршрута до РНТ. Пройденное расстояние определяют по разнице между фактическими КУР или пеленгами и расстоянием от участка маршрута до места установки РНТ.
___↓∆МПС_____ ▼ _____ 4 ______ S пр ______ W -? ____ 1
____ S пр -? ______ S ртс ___ 5 ______ | t пр ______ ▲ _____ 2
В уме рассчитывают по правилу: 1 км расстояния до РНТ = 1о ∆МПС если до РНТ 60 км, т.е., 1о ∆МПС будет соответствовать 1 км пройденному расстоянию до ППМ (КО); если до РНТ 30 км, то 1о ∆МПС будет соответствовать 0.5 км пройденному расстоянию до ППМ (КО); если до РНТ 90 км, то 1о ∆МПС будет соответствовать 1.5 км пройденному расстоянию до ППМ (КО) и т.д. (рис.31). По значению пройденного расстояния и отрезку времени между двумя пеленгованиями определяют путевую скорость. Конечно, при данном способе будет иметь место наличие погрешности в определении путевой скорости, поскольку решение выполняется с помощью тригонометрии, также могут быть погрешности в снятии значений КУР или МПС, но они не выходят за параметры нормативов воздушной навигации в определении НЭП и при необходимости данным способом вполне можно пользоваться.
Пробивание облачности и заход на посадку в сложных метеоусловиях (СМУ).
Любой полет в сложных метеоусловиях связан с пробиванием облачности и заходом на посадку по приборам. Этот этап полета является наиболее сложным и ответственным в воздушной навигации.
При выполнении маневра снижения и захода на посадку в сложных метеоусловиях экипаж использует специальное бортовое оборудование ВС и наземные системы посадки. В настоящее время многие аэродромы гражданской авиации оборудованы современными системами посадки, а некоторые типы ВС — системами автоматического захода на посадку.
Полеты воздушных судов гражданской авиации в районе аэродрома выполняются по схемам, установленным для данного аэродрома. Они разрабатываются в соответствии с действующей «Методикой расчета и построения схем захода на посадку самолетов и вертолетов гражданской авиации», которая устанавливает единый подход к расчету и построению схем захода на посадку для любых аэродромов и различных типов
ВС с учетом безопасности, экономичности и интенсивности полетов.
Схемы снижения и захода на посадку сводятся по определенным направлениям и помещаются в «Сборниках аэронавигационной информации» или в АИП.
Радиокомпасные системы позволяют выполнять заход на посадку в СМУ, используя бортовое оборудование – АРК и наземное – приводные радиостанции (ПАР). ПАР, как правило, входит в состав ОПРС или оборудования системы посадки (ОСП). Основными способами захода на посадку с помощью АРК являются:
- заход на посадку по малому (большому) прямоугольному маршруту;
- заход на посадку отворотом на расчетный угол;
-заход на посадку стандартным разворотом;
- заход на посадку с обратного направления;
- визуальный заход на посадку (ВЗП).
Все данные способы подробно будут рассмотрены в отдельной теме. Общее у всех этих способов (кроме ВЗП) является то, что экипаж на начальном этапе (подход) должен обязательно выйти на приводную радиостанцию, а далее уже выполнять заход по установленной схеме, с учетом выполненных расчетов. На посадочной прямой экипаж контролирует положение ВС относительно посадочного курса по показаниям стрелки АРК (МПР) и значением МПУпос, а моменты пролета ПАР – по развороту стрелки АРК на 180о.
Обязанности экипажа при подходе к аэродрому посадки.
1. Доложить диспетчеру о входе в район аэродрома и о расчетном времени прибытия.
2. Получить от диспетчера информацию о местонахождении ВС (при необходимости), разрешение на снижение и заход на посадку по выбранной системе, МПУ посадки, атмосферное давление на аэродроме, эшелон перехода, скорость и направление ветра у земли и на высоте круга, условия снижения, информацию о метеорологической обстановке.
3. Проверять готовность экипажа к заходу на посадку по карте
контрольной проверки.
4. Просмотреть схему снижения и захода на посадку, расположение и
превышение препятствий, указанных в схеме.
5. Уточнить курс посадки и минимум погоды.
6. Проверить расчет элементов полета для захода на посадку.
7. Настроить радиокомпас на ДПРМ и БПРМ аэродрома посадки.
8. Контролировать полет и вносить коррективы с расчетом точного
вывода ВС в исходную точку начала маневра (ПАР) на заданной высоте
и в установленное время.
Порядок расчета элементов захода на посадку будет рассмотрен в отдельной теме.
Контроль за выполнением четвертого разворота при заходе на посадку по системе ОСП. Точность выхода на предпосадочную прямую во многом зависит от правильности выполнения четвертого разворота, поэтому его выполнение необходимо контролировать.
При заходе на посадку по системе ОСП, контроль за правильностью выполнения четвертого разворота ведется путем сопоставления показаний ГПК с КУР (МПР) в двух точках, когда до окончания разворота остается 60° и 30°. При правильном выполнении четвертого разворота, когда до выхода на посадочный курс по ГПК остается 60°, КУР должен быть равен 52° (308°) (рис. 22.18), а когда до выхода на посадочный курс остается 30°, КУР = 27° (333°).
Если в этих точках КУР больше или меньше расчетного, необходимо изменением крена исправить ошибку в выполнении разворота по следующему правилу: если стрелка радиокомпаса подходит к нулю (МПУпос) раньше, чем показания ГПК к курсу посадки, уменьшить крен, а если позже, увеличить крен.

Выход на предпосадочную прямую и обеспечение безопасности захода на посадку. Длявывода ВС на предпосадочную прямую при заходе на посадку по системе ОСП необходимо:
1. Выполнить четвертый разворот до МКпос.
2. Определить положение ВС относительно предпосадочной прямой
путем сравнения МПР с МПУпос: если МПР = МПУпос, ВС находится на предпосадочной прямой; если МПР > МПУпос, ВС левее, а если МПР < МПУпос, правее этой прямой.
3. При наличии разницы между МПР и МПУпос взять курс для выхода на предпосадочную прямую. При разнице между МПР и пос более 10° угол выхода равен 15—20°, а при разнице менее 10° угол выхода не более 10°.
4. Определить момент выхода на предпосадочную прямую по МПРвых = МПУпос.
5. Выйдя на предпосадочную прямую, установить ВС на
МКпос = МПУпос — (±УСпос).
Минимальная высота снижения - высота, установленная для неточного захода на посадку, ниже которой снижение не может производиться без необходимого визуального контакта с ориентирами (именуется - МВС).
Неточный заход на посадку - заход на посадку по приборам без навигационного наведения по глиссаде, формируемой с помощью электронных средств. Таким заходом является заход по ОСП.
Минимальная высота снижения равна установленному минимуму погоды аэродрома по высоте нижней границы облаков (вертикальной видимости). Достижение МВС определяет экипаж по показаниям барометрического высотомера. При выполнении захода на посадку
Прекратить снижение и уйти на второй круг, если:
а) до МВС экипаж не установил надежного визуального контакта с
земными ориентирами (огнями приближения или подхода);
б) к моменту достижения МВС ВС не вышел на установленную
глиссаду снижения по высоте или курсу полета и безопасная посадка не
обеспечивается;
в) положение ВС в пространстве относительно ВПП не обеспечивает
безопасной посадки;
г) в воздушном пространстве или на ВПП появились препятствия,
угрожающие посадке;
д) имеются метеорологические явления, представляющие угрозу для
безопасной посадки.
После выхода на визуальный полет, но не позже достижения МВС, продолжать заход на посадку или уйти на второй круг.