

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Топ:
Марксистская теория происхождения государства: По мнению Маркса и Энгельса, в основе развития общества, происходящих в нем изменений лежит...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Интересное:
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Схема выборки-хранения.
При сборе информации и ее последующем преобразовании часто бывает необходимо зафиксировать значение аналогового сигнала в некоторый момент времени. Некоторые типы аналогово-цифровых преобразователей, например, последовательного приближения, могут давать совершенно непредсказуемые ошибки, если их входной сигнал не зафиксирован во время преобразования. При смене входного кода цифро-аналоговых преобразователей из-за неодновременности установления разрядов наблюдаются выбросы выходного напряжения. Для устранения этого явления на время установления также следует зафиксировать выходной сигнал ЦАП. Устройства выборки - хранения (УВХ) (слежения - хранения), выполняющие эту функцию, должны на интервале времени выборки (слежения) повторять на выходе входной аналоговый сигнал, а при переключении режима на хранение сохранять последнее значение выходного напряжения до поступления сигнала выборки. Схема простейшего УВХ приведена на рис. 1а.
Рис. 1. Устройство выборки - хранения
Когда ключ S замкнут, выходное напряжение схемы повторяет входное, т.е. Uвых = Uвх (рис. 1б). При размыкании ключа Uвых сохраняет свое значение, последнее перед размыканием. Выходной повторитель на ОУ препятствует разряду конденсатора хранения Схр на нагрузку схемы. Входное сопротивление повторителя должно быть как можно больше, поэтому обычно применяют ОУ с полевыми транзисторами на входе.
Простейшая схема УВХ имеет ряд недостатков:
При замкнутом ключе источник входного сигнала имеет значительную емкостную нагрузку. Если источником является ОУ, это обычно приводит к его самовозбуждению.
|
|
ОУ с полевыми транзисторами на входе, применяемые в качестве буферных повторителей, имеют значительное смещение нуля.
Эти недостатки во многом устранены в ИМС устройства выборки - хранения LF398 (отечественный аналог - 1100СК2), которая в течение многих лет была по существу промышленным стандартом. Функциональная схема этой ИМС приведена на рис. 2. Здесь схема имеет общую отрицательную обратную связь, охватывающую всю схему - с выхода усилителя ОУ2 на вход усилителя ОУ1.
Рис. 2. Функциональная схема УВХ 1100СК2
Когда коммутатор находится в замкнутом состоянии, потенциал выхода операционного усилителя ОУ1 вследствие действия общей отрицательной обратной связи устанавливается таким, что Uвых отличается от Uвх на величину напряжения смещения ОУ1. При этом смещение, возникающее из-за наличия коммутатора и ОУ2, сводится к нулю. Диоды в этом состоянии схемы заперты, так как падение напряжения на них, равное указанному смещению, достаточно мало (<= 20мВ). При размыкании коммутатора управляющим сигналом выходное напряжение остается неизменным. Резистор R1 и диоды предотвращают насыщение ОУ1, которое могло бы возникнуть из-за размыкания общей отрицательной обратной связи в этом режиме. Это снижает время переходного процесса при замыкании коммутатора. Усилитель ОУ1 обеспечивает высокое входное сопротивление УВХ. Он выполнен по схеме с биполярными транзисторами на входе, что легко позволяет получить смещение нуля схемы в пределах 5 мВ. Резистор R2 ограничивает ток заряда конденсатора хранения.
Основные характеристики УВХ:
Точностные характеристики
Напряжение смещения нуля Uсм, определяемое практически смещением нуля ОУ1.
Дрейф фиксируемого напряжения при заданной емкости Схр
d Uвых / d t= Iр / Схр,
где Iр - ток разряда конденсатора. Он складывается из токов утечки конденсатора и коммутатора, а также из входного тока усилителя ОУ2.
При заданном токе утечки величину дрейфа можно уменьшить путем увеличения емкости конденсатора Схр. Однако это ухудшает динамические характеристики схемы.
|
|
Динамические характеристики
Время выборки tв определяет, как долго при самых неблагоприятных условиях длится процесс заряда конденсатора хранения до величины входного напряжения с заданным уровнем допуска. Это время пропорционально емкости Схр. Перевод УВХ в режим хранения до окончания интервала выборки чреват значительными ошибками.
Апертурная задержка tа. Это период между моментом снятия управляющего напряжения и фактическим запиранием последовательного коммутатора.
В табл. 1 приведены основные характеристики некоторых типов УВХ, выпускаемых промышленностью.
Таблица 1
| Тип УВХ | Uсм, мВ | Дрейф В/с | Время выборки мкс | Апертурная задержка, нс | Uпит,В | Iпотр, мА | Примечания |
| 1100СК2 | 5 | 0,21 | 0,41,2 | 100 | +/-15 | 4,5 | Промышленный стандарт |
| SHC5320 | 1,5 | 0,51 | 1,51,3 | 25 | +/-15 | - | |
| АD9101 | 10 | 180004 | 7 нс | 0,25 | +5; -5,2 | 70 | Сверхбыстродействующее УВХ |
| АD781 | 3 | 0,014 | 0,63 | 35 | +/-12 | 4 | |
| АD684 | 4 | 14 | 13 | 35 | +/-12 | 25 | Счетверенное |
Примечания:
- Схр =1000 пФ;
- до точности 0,1%;
- до точности 0,01%;
- встроенный конденсатор хранения
Устройства на переключаемых конденсаторах
В последнее время наблюдается исключительно быстрый рост производства и применения МОП-структур, имеющих много преимуществ перед биполярными схемами. У МОП-структур большой входной импеданс, и они управляются напряжением (в отличие от биполярных схем, управляемых по существу током). Комплементарные МОП-структуры практически не потребляют мощности в статическом режиме. Технология МОП-структур обеспечивает большую плотность упаковки, чем биполярных. Наконец, эта технология позволяет простым способом реализовать в ИМС конденсаторы относительно большой емкости. Такие МОП-конденсаторы в сочетании с МОП-ключами позволяют заменить резисторы в некоторых типах ИМС и построить аналоговые вычислительные схемы со значительно лучшими точностными и эксплуатационными характеристиками. Замена резисторов конденсаторами, в частности, позволяет повысить точность аналоговых и аналого-цифровых устройств и уменьшить количество внешних элементов, подключаемых к микросхеме. В табл. 2 представлены сравнительные характеристики интегральных резисторов и МОП-конденсаторов.
Таблица 2
| Элемент | Технология изготовления | Точность изготовления,% | Температурный коэффициент 10-6К-1 | Коэффициент влияния напряжения 10-6В-1 |
| Резистор | Ионная имплантация с шириной 40 мкм | +/-0,12 | 400 | 800 |
| Конденсатор | МОП с толщиной диэлектрика 0,1 мкм | +/-0,06 | 26 | 10 |
|
|
Высокая точность изготовления интегральных МОП-конденсаторов и их стабильность способствовали тому, что в последние годы получили развитие способы обработки сигналов, использующие явление дискретного переноса зарядов. Один из путей реализации этих способов состоит в применении схем с переключаемыми конденсаторами.
Рассмотрим реализацию аналогового интегратора с применением переключаемого конденсатора. На рис. 3а приведена схема обычного аналогового интегратора.
Передаточная функция этой схемы имеет вид
| , (1) |
а частотная характеристика
| , (2) |
Рис. 3. Схемы интеграторов: а) - на RC-цепи, б) - с коммутируемым конденсатором
На рис. 3 б показан интегратор, в котором резистор R1 имитируется с помощью схемы с переключаемым конденсатором. Этот интегратор работает следующим образом. Коммутатор периодически переключается из положения 1 в положение 2 и обратно с периодом Т. В момент nT конденсатор С1 заряжается до напряжения uвх(nT), поэтому накопленный на нем заряд составляет С1uвх(nT). После переключения коммутатора из положения 1 в положение 2 в момент nТ+Т/2 конденсатор С1 разряжается на вход ОУ с конденсатором С2 в обратной связи. Поскольку входное дифференциальное напряжение и входные токи идеального ОУ равны нулю, конденсатор С1 разрядится полностью и его заряд суммируется с зарядом, накопленным на конденсаторе С2. В результате в момент (n+1)Т справедливо следующее уравнение зарядов:
С2uвых[(n+1)T] = С2uвых(nT) - С1uвх(nT). (3)
Здесь знак "-" обусловлен отрицательной обратной связью. Применив к обеим частям уравнения (3) z-преобразование, получим уравнение
zС2Uвых(z) = С2Uвых(z) - С1Uвх(z). (4)
Определенная из этого уравнения передаточная функция имеет вид

| , (5) |
Представляет интерес сравнение свойств интеграторов, показанных на рис. 3. Перейдем к частотным харктеристикам, подставив в (5) z=exp(jwT). Получим
| , (6) |
|
|
При wT стремящемся к 0 выражение в скобках в знаменателе правой части уравнения (6) неограниченно приближается к jwT. Таким образом, для частот входного сигнала, низких относительно частоты переключения коммутатора f=1/T, можно приближенно записать

| , (7) |
Сравнивая выражения (2) и (7), находим, что в схеме на рис. 3 б коммутируемый конденсатор имитирует входной резистор схемы на рис 3 а, с сопротивлением, равным T/С1. Поэтому, увеличивая частоту переключения коммутатора, мы уменьшаем эквивалентную постоянную времени интегрирования интегратора.
Применение интеграторов с переключаемыми конденсаторами в ИМС фильтров вместо обычных интеграторов дает два существенных преимущества. Во-первых, коэффициент передачи интегратора зависит только от отношения двух конденсаторов, а не от их абсолютных величин. Вообще говоря, можно достаточно просто создать на кремниевой подложке ИМС пару любых однотипных согласованных элементов, в то время как получение разнотипных элементов (резистора и конденсатора) с точными значениями и высокой стабильностью весьма затруднительно (различия температурных коэффициентов сопротивления (ТКС) и емкости (ТКЕ) могут быть значительными!). Поэтому ИМС фильтров на переключаемых конденсаторах значительно дешевле. Например, фильтр нижних частот 8-го порядка на ИМС МАХ291 (переключаемые конденсаторы) стоит почти в 5 раз дешевле аналогичного фильтра на двух ИМС MAX270 (RC-интеграторы).
Второе преимущество фильтров на переключаемых конденсаторах состоит в возможности настройки их характеристической частоты (т.е. центральной частоты полосового фильтра или точки -3 дБ фильтра нижних частот) изменением только тактовой частоты. Это объясняется тем, что характеристическая частота фильтра, построенного на основе метода переменных состояния, пропорциональна коэффициенту передачи интегратора (или, что то же, обратнопропорциональна постоянной времени интегрирования). Это позволяет выпускать фильтры 8-го порядка в корпусе с восемью выводами без внешних времязадающих элементов (например, MAX291), в то время как ИМС фильтров с RC-интеграторами имеют значительно больше выводов и требуют подключения значительного количества точных резисторов (например, микросхема МАХ274 имеет 24 вывода; ее типовая схема включения содержит 15 внешних резисторов).
Теперь о недостатках фильтров на переключаемых конденсаторах. Такие фильтры имеют два неприятных свойства, которые обусловлены присутствием периодического тактового сигнала. Первое, это сквозное прохождение сигнала тактовой частоты, а именно наличие некоторого выходного сигнала (с напряжением приблизительно от 10 до 25 мВ) с частотой тактового колебания, напряжение которого не зависит от прикладываемого входного сигнала. Чаще всего это не имеет существенного значения, поскольку этот сигнал значительно удален от полосы, занимаемой обрабатываемым сигналом (обычно разработчики ИМС задают частоту коммутации в 100 раз (реже в 50 раз) больше характеристической частоты фильтров). Если же такое сквозное прохождение тактового сигнала нежелательно, то для его подавления обычно используют простой ФНЧ первого или второго порядка. В состав ИМС фильтров на переключаемых конденсаторах обычно включают неинвертирующий повторитель, на котором может быть построен такой фильтр.
|
|
Вторая проблема более тонкого свойства связана с наложением спектров. Любые компоненты входного сигнала, которые отстоят по частоте от частоты тактового сигнала на величину, соответствующую частотам полосы пропускания, не будут подавлены. Например, при использовании ИМС MAX291 в качестве ФНЧ с частотой среза 1 кГц (при тактовой частоте в 100 кГц) все спектральные компоненты входного сигнала в диапазоне от 99 до 101 кГц будут преобразованы в полосу частот от постоянного тока до частоты 1 кГц. Поэтому в случае, если в спектре входного сигнала есть заметные компоненты частот, близких к тактовой частоте, перед входом фильтра следует включить простой предварительный фильтр нижних частот.
Линейные стабилизаторы напряжения
Почти любая электронная схема - от простых схем на транзисторах и операционных усилителях и до сложнейших цифровых и микропроцессорных систем - требует для своей работы одного или нескольких стабильных источников постоянного тока. Простые нерегулируемые источники питания типа "трансформатор - неуправляемый выпрямитель - фильтр нижних частот" во многих случаях не годятся, так как их выходное напряжение зависит от тока нагрузки и напряжения в сети. К счастью, легко построить источник стабильного питания, используя отрицательную обратную связь и сравнивая выходное напряжение с некоторым постоянным эталонным (опорным) напряжением. Такие стабилизированные источники питания универсальны и могут быть изготовлены в виде интегральных микросхем стабилизаторов напряжения.
Как правило, регулирующим элементом ИМС стабилизаторов напряжения является биполярный либо полевой транзистор. Если этот транзистор работает в активном режиме, то стабилизатор называют линейным (непрерывным), а если регулирующий транзистор работает в ключевом режиме - импульсным.
Схемотехника линейных стабилизаторов напряжения
Микросхемы источников питания относятся к так называемым интеллектуальным силовым приборам, то-есть к таким, у которых на кристалле помимо силовых транзисторов расположена более или менее сложная схема управления ими. Принципиальная трудность создания таких приборов заключается в том, что силовые транзисторы рассеивают значительную энергию, вызывая тем самым нагрев кристалла с существенным градиентом температур. Это резко ухудшает стабильность узлов схемы управления, таких как источник опорного напряжения и дифференциальный каскад усилителя ошибки.
Монолитный линейный интегральный стабилизатор напряжения был впервые разработан Р. Видларом (США) в 1967 году. Эта микросхема (mА723) содержит регулирующий транзистор, включаемый последовательно между источником нестабилизированного напряжения и нагрузкой, усилитель ошибки и термокомпенсированный источник опорного напряжения. Схема оказалась настолько удачной, что в начале 70-х годов выпуск ее доходил до 2 млн. штук в месяц! По массовости применения среди аналоговых ИМС линейные интегральные стабилизаторы напряжения стоят на втором месте после операционных усилителей.
11. Характеристики АЦП. Идеальная передаточная характеристика.
Передаточная характеристика АЦП - это функция зависимости кода на выходе АЦП от напряжения на его входе. Такой график представляет собой кусочно-линейную функцию из 2N "ступеней", где N - разрядность АЦП. Каждый горизонтальный отрезок этой функции соответствует одному из значений выходного кода АЦП (см. рис. 7). Если соединить линиями начала этих горизонтальных отрезков (на границах перехода от одного значения кода к другому), то идеальная передаточная характеристика будет представлять собой прямую линию, проходящую через начало координат.
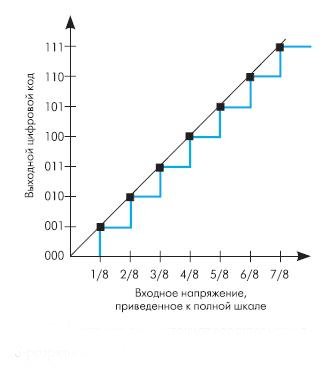
Рис. 7. Идеальная передаточная характеристика 3-х разрядного АЦП
Рис. 7 иллюстрирует идеальную передаточную характеристику для 3-х разрядного АЦП с контрольными точками на границах перехода кода. Выходной код принимает наименьшее значение (000b) при значении входного сигнала от 0 до 1/8 полной шкалы (максимального значения кода этого АЦП). Также следует отметить, что АЦП достигнет значения кода полной шкалы (111b) при 7/8 полной шкалы, а не при значении полной шкалы. Т.о. переход в максимальное значение на выходе происходит не при напряжении полной шкалы, а при значении, меньшем на наименьший значащий разряд (LSB), чем входное напряжение полной шкалы. Передаточная характеристика может быть реализована со смещением -1/2 LSB. Это достигается смещением передаточной характеристики влево, что смещает погрешность квантования из диапазона -1... 0 LSB в диапазон -1/2... +1/2 LSB.

Рис. 8. Передаточная характеристика 3-х разрядного АЦП со смещением на -1/2LSB
Из-за технологического разброса параметров при изготовлении интегральных микросхем реальные АЦП не имеют идеальной передаточной характеристики. Отклонения от идеальной передаточной характеристики определяют статическую погрешность АЦП и приводятся в технической документации.
12. Характеристики АЦП. Аддитивная погрешность.
Идеальная передаточная характеристика АЦП пересекает начало координат, а первый переход кода происходит при достижении значения 1 LSB. Аддитивная погрешность (погрешность смещения) может быть определена как смещение всей передаточной характеристики влево или вправо относительно оси входного напряжения, как показано на рис.9. Таким образом, в определение аддитивной погрешности АЦП намеренно включено смещение 1/2 LSB.
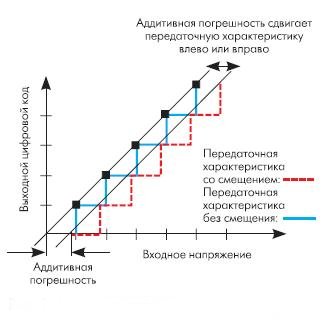
Рис. 9. Аддитивная погрешность (Offset Error)

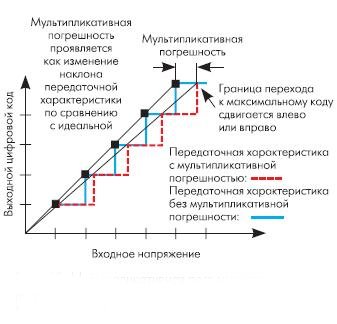
13. Характеристики АЦП. Мультипликативная погрешность.
Мультипликативная погрешность (погрешность полной шкалы) представляет собой разность между идеальной и реальной передаточными характеристиками в точке максимального выходного значения при условии нулевой аддитивной погрешности (смещение отсутствует). Это проявляется как изменение наклона передаточной функции, что иллюстрирует рис. 10.

14. Характеристики АЦП. Дифференциальная нелинейность.
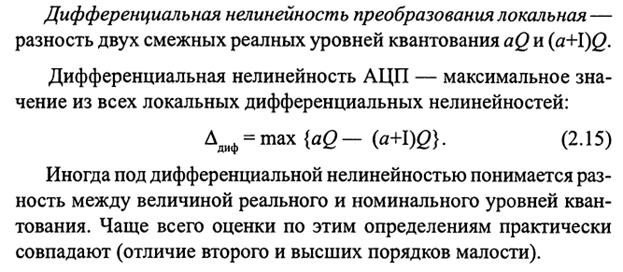
У идеальной передаточной характеристики АЦП ширина каждой "ступеньки" должна быть одинакова. Разница в длине горизонтальных отрезков этой кусочно-линейной функции из 2N "ступеней" представляет собой дифференциальную нелинейность (DNL).
Величина наименьшего значащего разряда у АЦП составляет Vref/2N, где Vref - опорное напряжение, N - разрешение АЦП. Разность напряжений между каждым кодовым переходом должна быть равна величине LSB. Отклонение этой разности от LSB определяются как дифференциальная нелинейность. На рисунке это показано как неравные промежутки между "шагами" кода или как "размытость" границ переходов на передаточной характеристике АЦП.

Рис. 11. Дифференциальная нелинейность (DNL)
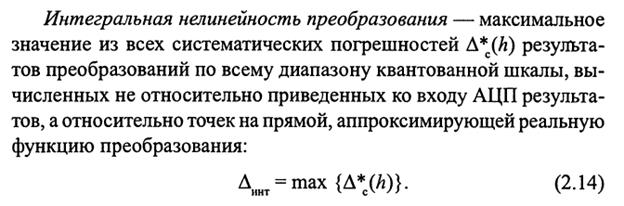
15. Характеристики АЦП. Интегральная нелинейность.
Интегральная нелинейность (INL) - это погрешность, которая вызывается отклонением линейной функции передаточной характеристики АЦП от прямой линии, как показано на рис. 12. Обычно передаточная функция с интегральной нелинейностью аппроксимируется прямой линией по методу наименьших квадратов. Часто аппроксимирующей прямой просто соединяют наименьшее и наибольшее значения. Интегральную нелинейность определяют путем сравнения напряжений, при которых происходят кодовые переходы. Для идеального АЦП эти переходы будут происходить при значениях входного напряжения, точно кратных LSB. А для реального преобразователя такое условие может выполняться с погрешностью. Разность между "идеальными" уровнями напряжения, при которых происходит кодовый переход, и их реальными значениями выражается в единицах LSB и называется интегральной нелинейностью.

16. Характеристики АЦП. Отношение сигнал/шум.
Отношение "сигнал/шум" (SNR) - это отношение среднеквадратического значения величины входного сигнала к среднеквадратическому значению величины шума (за исключением гармонических искажений), выраженное в децибелах:
SNR(dB) = 20 log [ Vsignal(rms)/ Vnoise(rms) ]
Это значение позволяет определить долю шума в измеряемом сигнале по отношению к полезному сигналу.
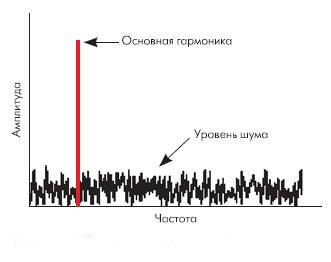
Рис. 14. SNR - Отношение "сигнал/шум"
Шум, измеряемый при расчете SNR, не включает гармонические искажения, но включает шум квантования. Для АЦП с определенным разрешением именно шум квантования ограничивает возможности преобразователя теоретически лучшим значением отношения сигнал/шум, которое определяется как:
SNR(db) = 6.02 N + 1.76,
где N - разрешение АЦП.
Спектр шума квантования АЦП стандартных архитектур имеет равномерное распределение по частоте. Поэтому величина этого шума не может быть уменьшена путем увеличения времени преобразования и последующего усреднения результатов. Шум квантования может быть снижен только путем проведения измерений с помощью АЦП большей разрядности.
Особенность сигма-дельта АЦП состоит в том, что спектр шума квантования у него распределен по частоте неравномерно - он смещен в сторону высоких частот. Поэтому, увеличивая время измерения (и, соответственно, количество выборок измеряемого сигнала), накапливая и затем усредняя полученную выборку (фильтр нижних частот), можно получить результат измерений с более высокой точностью. Естественно, при этом общее время преобразования будет возрастать.
Другие источника шума АЦП включают тепловой шум, шум составляющей 1/f и джиттер опорной частоты.
17. Характеристики АЦП. Общие гармонические искажения. Отношение «сигнал/шум и искажения».
Нелинейность в результатах преобразования данных приводит к появлению гармонических искажений. Такие искажения наблюдаются как "выбросы" в спектре частот на четных и нечетных гармониках измеряемого сигнала (рис. 15).
Эти искажения определяют как общие гармонические искажения (THD). Они определяются как:

Величина гармонических искажений уменьшается на высоких частотах до точки, в которой амплитуда гармоник становится меньше, чем уровень шума. Таким образом, если мы анализируем вклад гармонических искажений в результаты преобразования, это можно делать либо во всем спектре частот, ограничивая при этом амплитуду гармоник уровнем шума, либо ограничивая полосу частот для анализа. Например, если в нашей системе стоит ФНЧ, то высокие частоты нам просто неинтересны и высокочастотные гармоники не подлежат учету.

Рис. 15. БПФ отражает гармонические искажения
Отношение "сигнал/шум и искажения" (SiNAD) более полно описывает шумовые характеристики АЦП. SiNAD учитывает величину как шума, так и гармонических искажений по отношению к полезному сигналу. SiNAD рассчитывается по следующей формуле:

18. Характеристики АЦП. Динамический диапазон, свободный от гармоник.
Динамический диапазон, свободный от гармоник, представляет собой разницу между величиной измеряемого сигнала и наибольшим пиком искажений (см. рис.16). Этот динамический диапазон обозначается как SFDR. Он ограничен снизу амплитудой максимальной гармоники паразитных выбросов на выходе АЦП в диапазоне его рабочих частот.

Рис. 16. Динамический диапазон, свободный от гармоник
Спецификация АЦП, приводимая в технической документации на микросхемы, помогает обоснованно выбрать преобразователь для конкретного применения. В качестве примера рассмотрим спецификацию АЦП, интегрированного в новый микроконтроллер C8051F064 производства фирмы Silicon Laboratories.
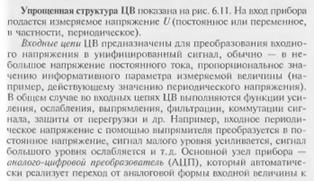
19. Основные принципы построения цифрового измерительного прибора.
Цифровой измерительный прибор (ЦИП) – средство измерений, автоматически вырабатывающее сигналы измерительной информации в цифровой форме. Цифровой измерительный прибор имеет ряд преимуществ перед аналоговыми приборами: удобство отсчитывания значений измеряемой величины, возможность полной автоматизации процесса измерений, регистрация результатов измерения с помощью цифропечатающих устройств и перфораторов. Поскольку результат измерения в ЦИП выражен в цифровом коде, измерительную информацию можно вводить в цифровую ЭВМ.
Не следует, однако, считать, что ЦИП в будущем полностью вытесняет аналоговые приборы. Аналоговые приборы просты и надежны. В тех случаях, когда оператору необходимо следить за уровнями изменяющихся во времени сигналов, стрелочные указатели более удобны из-за наглядности представления об изменениях величины, о ее минимальном значении, приближении к порогу и т. п.
В ЦИП происходит преобразование непрерывной измеряемой величины в цифровой код. Осуществляется этот процесс с помощью аналого-цифрового преобразователя (АЦП), в котором сигнал измерительной информации подвергается дискретизации, квантованию и кодированию.
Дискретизация, т. е. процесс преобразования непрерывного сигнала измерительной информации в дискретный, может осуществляться как по времени, так и по уровню. Дискретизация по времени выполняется путем взятия отсчетов сигнала X(t) в определенные детерминированные моменты времени. Таким образом, от сигнала измерительной информации сохраняется только совокупность отдельных значений. Промежуток времени Δt между двумя моментами дискретизации называют шагом дискретизации. Обычно моменты отсчетов на оси времени выбираются равномерно, т. е. шаг дискретизации Δt постоянен.
Дискретизация значений измерительного сигнала по уровню носит название квантования. Операция квантования сводится к тому, что непрерывная по времени и амплитуде величина заменяется ближайшим фиксированным значением по установленной шкале дискретных уровней. Эти дискретные (разрешенные) уровни образованы по определенному закону с помощью мер. Разность ΔХ между двумя разрешенными уровнями называют интервалом (шагом или ступенью) квантования. Интервал квантования может быть как постоянным, так и переменным. Временная дискретизация измерительного сигнала имеет смысл, когда его величина изменяется во времени. Если измерительный сигнал постоянен, достаточно осуществить квантование. Особым случаем является измерение времени (временного интервала).
Процесс дискретизации здесь теряет смысл, и осуществляется квантование самого времени.
Следующим преобразованием измерительного сигнала, является кодирование. Цифровым кодом называется последовательность цифр или сигналов, подчиняющаяся определенному закону, с помощью которой осуществляется условное представление численного значения величины. Графически описанные преобразования поясняются на рис.1. Исходный измерительный сигнал Х(t) (рис.1,а) представляет собой непрерывную функцию времени. Дискретизация выполняется с интервалом Δt.Моменты дискретизации отмечены на рис.1,а цифрами 1, 2,......, 9. Практически такую дискретизацию можно осуществить путем амплитудной модуляции исходным сигналом Х(t) последовательности коротких импульсов с периодом Δt. Как видно из рис.1.б, значения сигнала Х(ti), полученные после дискретизации, точно соответствуют мгновенным значениям функции Х(t). Если на том же рисунке отметить уровни квантования, расположенные друг от друга на расстоянии ΔХ, то часть дискретных значений сигнала окажется в промежутках между ними. Процесс квантования по уровню сводится к округлению дискретных значений сигнала до значений, соответствующих ближайшим разрешенным уровням. Так, в момент 1 мгновенное значение сигнала превышает уровень Х3 на величину, несколько меньшую ΔХ/2 (см. рис.1,б). Округление производится в сторону уменьшения, и квантованное значение выбирается равным Х3. В момент 2 значение сигнала превышает уровень X4, на величину, большую чем ΔХ/2. Квантованное значение принимается равным Х5 (рис.1,в). Последний этап заключается в преобразовании квантованного сигнала X(ti)кв в цифровой код. На рис.1,г представлен для примера унитарный код X(ti)код, соответствующий значениям квантованного сигнала. При таком способе кодирования число импульсов в кодовой группе прямо пропорционально уровню квантованного сигнала. Например, отсчету 7 соответствует уровень квантования X6, и в кодовой группе n7, содержится шесть импульсов.
Из рис.1 ясно, что при дискретизации и квантовании сигнала возникает погрешность преобразования. Непрерывная функция X(t) анализируется только в моменты дискретизации. На интервале Δt между двумя отсчетными точками сигнал предполагается неизменным. Уменьшением интервала Δt, т. е. сближением отсчетных точек можно добиться снижения погрешности до допустимой величины. При измерении постоянных величин погрешность преобразования, связанная с дискретизацией, равна нулю. Погрешность, возникающая при квантовании непрерывной измеряемой величины, обусловлена конечным числом уровней квантования. Эта погрешность характерна для всех ЦИП, она носит название погрешности дискретности Δд. При равномерном квантовании погрешность Δд находится в пределах 0 Δд ΔХ.
Следующий этап преобразований в ЦИП заключается в превращении цифрового кода в показания цифрового отсчетного устройства. Для этого необходим дешифратор, который превращает кодовые группы в соответствующие напряжения, управляющие работой цифрового индикатора.
Рассмотренная последовательность преобразований, осуществляемая в аналого-цифровом преобразователе (АЦП), дешифраторе и цифровом индикаторе, конечно, дает упрощенное представление о работе ЦИП. Примером может служить случай измерения постоянной величины. Для этого достаточно одного цикла преобразований, в результате которого получится кодовая группа. Но кодовая группа это «пакет» импульсов, передаваемый в течение короткого интервала времени. Результат измерений должен сохраняться на экране достаточно долго, например, до следующего цикла. Поэтому в состав ЦИП должно входить запоминающее устройство (ЗУ).
В заключение перечислим возможные режимы работы ЦИП и их характеристики.
Режим однократного измерения. Этот режим удобен, когда измеряемый параметр постоянен. Команда на проведение измерения подается оператором, результат измерения хранится в запоминающем устройстве и воспроизводится на цифровом индикаторе. В ЦИП осуществляется квантование измерительного сигнала и его кодирование.
Режим периодического измерения. Процесс измерения повторяется периодически через интервал Δt, установленный оператором. В ЦИП осуществляются операции дискретизации, квантования и кодирования. После каждого цикла измерения результат на экране цифрового индикатора обновляется.
Следящий режим измерения. Цикл измерения повторяется, после того как изменение измеряемой величины превысит ступень квантования.
Помимо погрешности измерения, к числу важных характеристик
ЦИП относится его быстродействие, время измерения и помехоустойчивость. Под быстродействием ЦИП понимается максимальной число измерений, выполняемых в единицу времени с нормированной погрешностью. Время измерения – интервал от начала цикла преобразования измеряемой величины до получения результата. Под помехоустойчивостью понимают способность ЦИП с нормированной погрешностью производить измерения при наличии помех.
Быстродействие ЦИП очень высокое. Современная элементная база позволяет строить ЦИП, обеспечивающие до 107 преобразований в секунду. Это, однако, оказывается излишним, поскольку регистрирующие устройства обеспечивают фиксацию не более 100 результатов измерений в секунду. При визуальном наблюдении требования к быстродействию резко снижаются, поскольку оператор способен оценить не более 2—3 результатов измерений в секунду.
ЛУЧШЕ СМОТРЕТЬ КОНСПЕКТ!!!!!
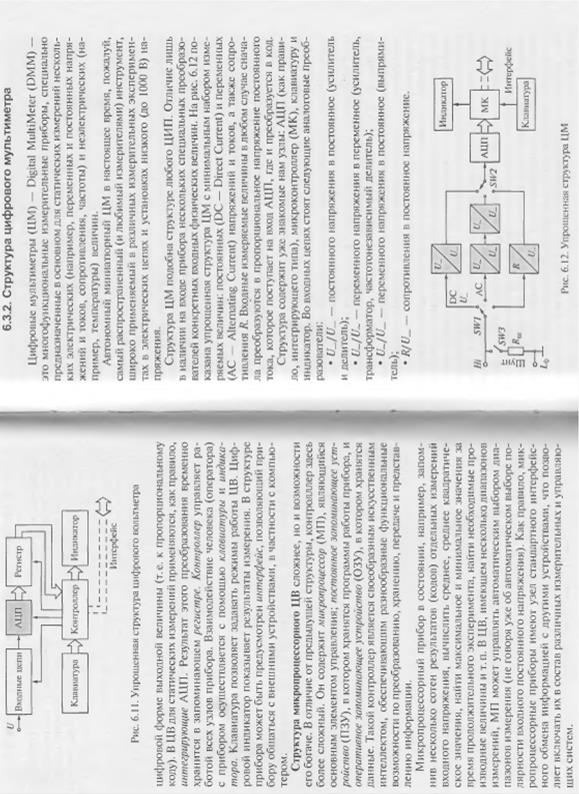
20. Цифровые вольтметры, мультиметры.

|
|
|

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!