Толчок приводного двигателя в регенеративную работу может происходят при неправильном торможении. При такой работе иногда требуются отрицательные движущие силы или тормозные силы для того, чтобы держать конвейер в соответствии с запланированным профилем скорости. Отрицательные движущие силы могут быть обеспечены тормозной системой или путем нажимать приводной двигатель переходит в режим регенерации. Тем не менее, в случай конвейерной системы, не имеющей ни тормозной системы, ни функция регенерации, приводная система не может обеспечить отрицательный крутящий момент. В таких случаях крутящий момент привода может быть внезапно увеличен проиграл, и тогда ремень не сработает так, как планировалось. Поэтому в случаях, когда где приводная система не может произвести генеративный приводной момент,риск толкать мотор в регенеративную деятельность должен следует уделять больше внимания, особенно в операциях замедления.
ЭКО метод
При проектировании ленточных конвейеров применяются существующие стандарты, такие как DIN 22101 [9], CEMA [27] и ISO5048 [13], Как правило, используются для расчета необходимые движущие силы на приводных шкивах и приблизить минимальное время запуска. Важно отметить, что при расчете этих стандартов конвейерная лента рассматривается как жесткое тело да и упруговязкие свойства ремня не учитываются. В если речь идет о системах ленточного конвейера малой протяженности и малой производительности, то это может привести к приемлемому динамическому поведению ремня. Однако, в случай систем ленточных конвейеров большой протяженности и большой производительности,незнание динамики ремня может вызвать такие эксплуатационные проблемы, как преждевременное разрушение ремня и повреждение приводных систем.Поэтому необходим способ обеспечения здоровых переходных процессов для защиты ленточного конвейера от потенциальных рисков, особенно в условиях эксплуатации в случаи, когда скорость конвейера часто регулируется. Основывающийся на основе нашей предыдущей работы [20,21] в данной работе предлагается метод расчетно-оптимизационной оценки (ЭКО) для определения минимума время регулировки скорости, принимая на себя как потенциальные риски, так и учитывается динамика конвейера.
Метод ЭКО основан на моделировании и состоит из трех этапов этапы: оценка, расчет и оптимизация. при оценке шаг, оценщик строится для оценки минимального времени корректировки.Принимая во внимание потенциальные риски, перечисленные в разделе 2, оценщик рассматривает ремень как жесткий элемент и вычисляет допустимые значения максимальное ускорение в переходных режимах работы. Затем, учитывая профили ускорения, требуемая минимальная скорость время регулировки может быть грубо оценено. В разделе 3.1 описываются оценка в деталях. Цель этапа расчета состоит в том, чтобы наблюдать динамические характеристики ленты в переходных режимах работы. Этот шаг учитывает влияние гистерезиса ремня и проводит компьютерное моделирование. Моделирование проводится на основе конечного элемента метод, который подробно описан в разделе 3.2. В случае дальнего следования и ленточный транспортер большой емкости, динамика транспортера в переходном процессе сложна относительно вязкоупругости ленты.Поэтому переходная операция наблюдается на этапе расчета это может привести, например, к риску чрезмерного натяжения ремня. В таких случаях,оптимизация необходима для улучшения динамических характеристик и для достижения требуемого минимального времени регулировки скорости.В разделе 3.3 представлен шаг оптимизации.
Оценка
Принимая во внимание потенциальные риски в переходных операциях,оценщик строится на этом шаге для оценки минимальной корректировки время. Для того, чтобы четко описать оценщик, случай, как показано в рис. 3 - это пример. Ленточный транспортер приводится в движение головным шкивом. В чтобы обеспечить предварительное натяжение, один шкив гравитационного захвата устройства устанавливается на обратной стороне после головного шкива. В следующем,как допустимое максимальное ускорение, так и замедление являются вычисленный.
Максимальное ускорение
Что касается риска разрыва ленты в месте соединения, вызванного чрезмерным натяжением, то натяжение ленты на пути транспортировки должно поддерживаться на безопасном уровне. В случаях, показанных на рис. 3, максимальный пояс натяжение обычно происходит непосредственно перед приводным шкивом. Напряжение Т1 прежде чем приводной шкив в установившемся состоянии можно будет аппроксимировать с помощью
 =
=  + Fd (4)
+ Fd (4)
где Fd-движущая сила, а T2-натяжение ремня после привода шкив. Как показано на рис. 3.Если горизонтальное расстояние между приводной шкив и гравитационное приемное устройство с массой mT невелики,натяжение ремня T2 после приводного шкива можно аппроксимировать следующим образом
=  g (5)
g (5)
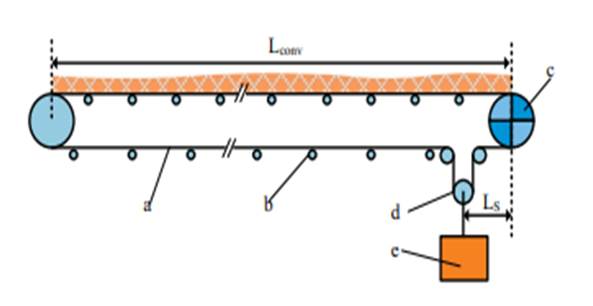
Рис. 3. Ленточный транспортер с одиночным срезанным гравитационным захватом. “a": конвейерная лента; " b”:зевака; “с”: приводной шкив; “d”: до шкива; “е”: принять меры массы; “Lconv: длина конвейера; " Ls: горизонтальное расстояние между приводным шкивом и приемным шкивом.
где g-ускорение силы тяжести. По данным эквалайзера. (1), допустимое натяжение ремня  перед приводным шкивом может быть оценено с помощью
перед приводным шкивом может быть оценено с помощью
=  (6)
(6)
Затем комбинация эквалайзеров. (4) - (6) дает максимально допустимые значения движущих сил
 = -
= -  (7)
(7)
в отношении риска чрезмерного натяжения ремня.
Проскальзывание ремня является еще одним серьезным риском в операциях ускорения. Как согласно Эйлеру [24] и Энтельвейну [25], проскальзывание ремня происходит всякий раз, когда движущая сила, действующая на приводной шкив, превышает максимально допустимое трение. Тогда по экв. (3), максимум требуемые движущие силы ограничены
 =
=  = (
= ( -1) (8)
-1) (8)
чтобы предотвратить риск проскальзывания ремня.
Номинальный крутящий момент двигателя-это максимальный непрерывный крутящий момент, доступный при расчетной скорости, которая позволяет двигателю выполнять работу без перегрев. В практических ускоряющих операциях максимальный рабочий крутящий момент должен быть немного больше номинального крутящего момента  на несколько секунд. Коэффициент максимального рабочего момента а номинальный крутящий момент определяется как коэффициент обслуживания (
на несколько секунд. Коэффициент максимального рабочего момента а номинальный крутящий момент определяется как коэффициент обслуживания ( ). Например, в стандартный коэффициент обслуживания для открытого капельного двигателя составляет 1,15 дюйма [30].Затем в режиме разгона максимально допустимый двигатель рабочий крутящий момент
). Например, в стандартный коэффициент обслуживания для открытого капельного двигателя составляет 1,15 дюйма [30].Затем в режиме разгона максимально допустимый двигатель рабочий крутящий момент  .,
.,
=  (9)
(9)
и максимальная движущая сила  на приводной шкив
на приводной шкив
 (10)
(10)
в котором  является передаточным отношением коробки передач, а
является передаточным отношением коробки передач, а  -приводными шкивами радий.
-приводными шкивами радий.
Затем принимая эти три риска при ускорении операций в учет, разрешенная максимальная движущая сила  в переходном процессе операции являются
в переходном процессе операции являются
 (11)
(11)
Согласно Второму закону Ньютона, ускорение- это конечный результат любых и всех сил, действующих на ленточные конвейеры. Затем в ускорении операции, допустимое ускорение которых составляет
 (12)
(12)
где  -общее сопротивление движению, а
-общее сопротивление движению, а  -общий комок масса ленты, роликов и насыпного материала на ленте. По данным немецкого Института стандартизации [9], эмоциональная сопротивления вдоль транспортирующего маршрута могут быть оценены по формуле
-общий комок масса ленты, роликов и насыпного материала на ленте. По данным немецкого Института стандартизации [9], эмоциональная сопротивления вдоль транспортирующего маршрута могут быть оценены по формуле
 (13)
(13)
а общая масса составляет
 (14)
(14)
в котором
 -коэффициент вторичных сопротивлений
-коэффициент вторичных сопротивлений
 -искусственный коэффициент сопротивления трению
-искусственный коэффициент сопротивления трению
 -длина транспортирования транспортера
-длина транспортирования транспортера
 -масса роликов в единице длины
-масса роликов в единице длины
 -линейная плотность пояса
-линейная плотность пояса
 -линейная плотность сыпучего материала
-линейная плотность сыпучего материала
 -угол наклона ленточного конвейера
-угол наклона ленточного конвейера
 -разность высот между погрузкой и разгрузкой зоны ленточного конвейера
-разность высот между погрузкой и разгрузкой зоны ленточного конвейера
Наконец, максимально допустимое ускорение можно оценить по формуле замена эквалайзеров. (13) и (14) в эквалайзер. (12).
Максимальное замедление
При мягком торможении движущая сила, действующая на приводные шкивы постепенно уменьшаются и скорость конвейера уменьшается гладко. В отличие от операции ускорения, операция торможения в основном учитывает риск вдавливания двигателя в двигатель восстановительные операции. В случае ленточных транспортеров которые не могут обеспечьте отрицательные движущие силы, максимальное торможение может быть оцененным по:
 (15)
(15)





