Современные тенденции в обеспечении безопасности социальных систем, требуют решения целого ряда актуальных проблем, разрешение которых позволило бы повысить уровень безопасности общества. Реалии проведения массовых мероприятий показывают, что подобные акции зачастую являются главной мишенью для различных экстремистки настроенных групп людей. Поэтому на первый план выходят проблемы их безопасного проведения. Планирование мероприятий подобного класса требует учета большого количества факторов. Одним из них является территория их проведения. Опыт показывает, что неудачное расположение строительных и других объектов в местах скопления людей, является одной из главных причин возникновения ситуаций подобных давке, влекущих за собой состояние паники и огромное количество жертв. В тоже время эффективное расположение спецпредметов (заградительные щиты, поручни, и т.д.) на имеющейся территории может существенно снизить вероятность возникновения ситуаций, прямо или косвенно угрожающих жизни людей. Для определения мест установки подобных заграждений необходимую помощь может оказать система моделирования поведения коллективов людей.
Работы в области искусственного интеллекта, а также современные подходы к психологическому осмыслению взаимодействия людей позволяют осуществить попытку спроецировать толпу, как социальное образование, в техническую плоскость мультиагентных систем. Рассматривая поведение человека в социальной среде, можно сделать предположение, что поведение отдельного индивидуума в большей степени зависит от ситуации, создаваемой ему соседями, чем от личностных побуждений самого субъекта. Таким образом, поведение коллектива в целом складывается из попыток отдельных людей реализовать свои желания.
Анализируя поведение толпы, как социального образования для абсолютного большинства субъектов наибольший приоритет имеет желание переместиться, точнее, сделать шаг, определенный его текущей целью. Поэтому поведение толпы в первом приближении может определяться механическим взаимодействием внутри коллектива. Природа подобных контактов может быть прямой или опосредованной, ибо два человека могут взаимодействовать между собой и производить прямое физическое воздействие, находясь в непосредственной близости, а также влиять друг на друга через других участников, подталкивая их к тем или иным шагам.
Для идентификации своих последующих шагов агента модель должна учесть физиологическую неоднородность коллектива. Каждому отдельному человеку свойственен предел физических возможностей, определенный в каждом отдельном случае индивидуально. С другой стороны вероятность встретить в толпе человека, к примеру, массой m, может быть установлена статистическими методами. В первом приближении она может быть распределена согласно закону Гаусса с центром в точке статистически среднего веса в исследуемом коллективе. Согласно данному подходу могут быть введены другие физические величины и законы их изменения.
Система получает определенную степень гибкости относительно механической части проблемы. Добавляя в расчетную часть восприятие психологических компонентов, мы конструируем модель поведения толпы, имеющую высокую степень адекватности реальной. Качество воспроизведения моделью свойств толпы возрастает пропорционально количеству учтенных в ходе моделирования сторон взаимодействия лиц ее составляющих.
Таким образом, разрабатывая модель поведения толпы, получаем мультиагентную систему, в которой на «выходе» каждого агента имеем вектор, определяющий его физическое и эмоциональное состояние. Интерпретация этих данных проводится каждым агентом индивидуально за счет уникальности его параметров.
При их генерации учитываются физиологические и психологические особенности индивида. Если для нахождения механических параметров агента зачастую достаточно определить вес моделируемого субъекта (остальные параметры можно вывести из классических законов Ньютона), то для определения психического состояния можно ввести понятие «энергия» агента. Энергией агента назовем величину, определяющую близость субъекта к состоянию паники. Каждый агент имеет порог, по достижении которого он переходит в состояние паники. Состояние паники характеризуется желанием агента как можно скорее покинуть территорию, прямо или косвенно угрожающую его «здоровью», т.е. максимально быстро достичь безопасного местоположения. Определение таких мест каждый агент проводит самостоятельно. В общем случае для локализации такого положения агент ищет точку, максимально удаленную от паникующих соседей. Чем больше превышение энергией порога, тем большее расстояние требуется агенту для «успокоения».
Энергия агента динамически изменяется в процессе моделирования, так как является составной частью психики агента. Повышенное эмоциональное состояние соседних субъектов «отрицательно» сказывается на уровне энергии самого агента.
Чем больше количество паникующих субъектов вокруг, тем ближе величина его энергии к порогу. Сам факт перехода соседним агентом порогового состояния оказывает дополнительное психологическое воздействие.
Просуммировав все перечисленные моменты можно записать алгоритм функционирования отдельного агента системы:
.Определить координаты цели своего перемещения. Для агента находящегося в состоянии паники целью перемещения будет точка, удаленная от толпы на расстояние, определенное энергией агента. С каждым шагом, направленным на отделение агента от толпы, величина энергии удаляется от значения порога, т.е. перемещение в клетку с меньшим количеством агентов вызывает уменьшение начальной энергии агента E0. Для агента находящегося в нормальном состоянии цель совпадает с общей направленностью движения в случае моделирования проведения демонстраций и т.п., либо случайно выбранное направление в случае моделирования поведения людей в универмагах. Если какая-либо ячейка недоступна, то на ее месте фиксируется непроходимая клетка. После определения цели агент с помощью одного из методов трассировки находит к ней путь. В ходе проектирования модели использовался волновой алгоритм трассировки.
.Определить направление следующего шага. После того как цель определена, необходимо соотнести свой следующий шаг с общим положением окружения. Каждый соседний агент имеет свое приоритетное направление, поэтому возможность перемещения будет зависеть от физических параметров человека и состояния психической энергии. Таким образом, на данном этапе агент производит разворачивание суммарного образа, создаваемого всей совокупностью соседних субъектов, и определяет на его основе направление следующего шага. Если перемещение в направлении выбранного целью шага невозможно, например, в этом направлении на данном шаге образовалась пробка, то выбирается следующая цель. Если целей нет, то наращивается значение энергии (растет беспокойство) и агент остается на месте.
.Скорректировать текущее значение энергии. Необходимо определить общий энергетический фон и количество соседей перешагнувших свой порог и сравнить с показателями на предыдущем шаге. Энергия агента изменяется исходя из следующего выражения:
E = f 1 (E 0)+ f 2 (m)+ kEp - Rn,
где f1 - восприятие энергетического фона; Е0 - начальная энергия агента; n - количество агентов в ячейке; m - количество соседей переступивших порог энергии; f2 - восприятие агентом факта перехода соседей в состояние паники; R - сопротивление клетки; Ер - прирост энергии при ошибке в нахождении пути; k - количество перебранных целей в ходе определения пути.
. Сделать шаг. Следующим шагом в построении модели является формирование среды обитания агентов. В зависимости от выбранного шаблона соседства для отображения территории может использоваться матрица (4- или 8-линковый шаблон), либо более сложная структура. В случае использования матрицы каждой ее клетке однозначно сопоставлен элемент моделируемой площади, который имеет некоторый набор свойств. Для системы минимум необходимы следующие параметры ячейки: ёмкость С; сопротивление R.
Емкость С есть величина, характеризующая максимальное количество агентов единовременно находящихся на единице площади. Значение сопротивления R определяет минимальный уровень психофизических параметров, оказываемый одним агентом своему соседу. Величина Rn в формуле определяет минимальный уровень энергии агента необходимый для продвижения агента в данную ячейку (чем больше плотность людей в толпе, тем более сильный барьер представляет собой клетка для агента). Величина шага агента определяется значением его энергии в соответствии со следующей формулой:
= 0.01*E,
где E ∉ [0,100] - энергия агента.
Таким образом, максимальное расстояние, которое может преодолеть агент за один шаг равно 1 ячейке. Это сопоставимо с площадью одной клетки в 1 м2.
Чем ближе уровень энергии агента к критическому уровню и больше его физические возможности, тем более высокий барьер агент может преодолеть. Каждодневное появление агента в ячейке отображается увеличением ее сопротивления, и наоборот, выход агента из нее сопровождается уменьшением сопротивления. Территория может иметь вид:
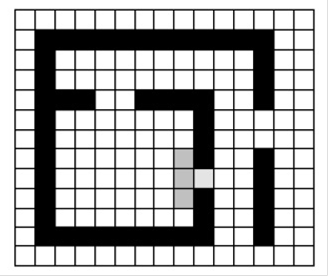
Рис. 1. Среда обитания агентов
Если сопротивление ячейки нормировать, то значение 0 и 1 будут означать наибольшую и наименьшую вероятность преодоления агентом ячейки соответственно. Следовательно, нахождения на территории значений в промежутке [0,1]обозначат препятствия: окна, столы, стулья и т.д.
Вернувшись к первоначальной задаче, имеем мультиагентную систему, воспроизводящую модель поведения коллектива людей и систему моделирования среды их обитания. Для определения мест установки заградительных барьеров представим среду обитания в виде матрицы, в клетках которой расположены значения от нуля до единицы, дублирующие матрицу территории. Представим матрицу в виде строки и получим вектор M={a1,а2, …, аn}, где аi - сопротивляемости соответствующих элементарных площадей территории. Зафиксировав ячейки, отображающие статические препятствия, например стены, можно моделировать поведение людей на исследуемом объекте. На основании этого можно построить генетический алгоритм нахождения оптимальных мест расположения препятствий. Задав общую цель для всех агентов (например, ячейки за пределами помещения) и целевую функцию в виде времени (или шагов моделирования), за которое все агенты покидают помещение, можно оптимизировать матрицу сопротивлений согласно простому генетическому алгоритму. Кроме времени, в целевой функции может фигурировать минимальная площадь, занимаемая препятствиями. В качестве решения получаем матрицу, в которой указаны координаты мест установки препятствий. Об их виде можно судить по значению коэффициента сопротивления, чем он больше, тем более серьезное оборудование требуется.





