

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...
Топ:
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Интересное:
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
4.1 Модель линии электропередач (ЛЭП)
Назначение ЛЭП – передача электрической энергии от источников к потребителям. Виды ЛЭП – воздушные, кабельные, воздушно-кабельные.
В схемах замещения ЛЭП представляется П – образной схемой замещения.
|
|
|

|
|
Параметры схемы замещения ЛЭП: характеризуется сопротивлением и проводимостью.
Сопротивление Z = R + jX – продольный элемент схемы замещения.
R – активное сопротивление, соответствует тепловым потерям в проводе;
X – реактивное сопротивление (имеет индуктивный характер), соответствует процессам, связанным с созданием электромагнитного поля вокруг провода.
Поперечная проводимость на землю Y=g+jb – поперечный элемент схемы замещения.
q – активная составляющая проводимости, соответствует потерям на “корону“;
b – реактивная составляющая проводимости, отражает процессы генерации реактивной мощности в ЛЭП. Имеет емкостной характер.
Значения параметров схемы замещения R, X, g, b определяются по формулам:

| (4.1) |

| (4.2) |
где  – параметры линии на единицу длины, (справочные данные);
– параметры линии на единицу длины, (справочные данные);  – длина линии. X0 в практических расчётах равно 0.4 Ом/км.
– длина линии. X0 в практических расчётах равно 0.4 Ом/км.
В расчётах часто используется значение продольной проводимости – это величина, обратная сопротивлению  . (4.3)
. (4.3)
В развёрнутом виде схема замещения ЛЭП может быть представлена:

|

|
|

|
|
|
В сетях напряжением 330 кВ и ниже параметр g можно не учитывать. В сетях напряжением 35 кВ и ниже можно не учитывать параметр b.
Тогда получаем схему замещения ЛЭП без поперечных элементов:
|
 (4.4)
R0, X0 – погонное активное и индуктивное сопротивления (справочные данные) (4.4)
R0, X0 – погонное активное и индуктивное сопротивления (справочные данные)
|
Пример.
|
|
l=20 км, X0=0.4 Ом/км, R0=0.156 Ом/км.
Найти полное сопротивление ЛЭП.
Справка:
Активная проводимость (G) обусловлена потерями активной мощности в диэлектриках.
Ее величина зависит от:
- тока утечки по изоляторам (малы, можно пренебречь);
- потерь мощности на корону.
Активная проводимость приводит к потерям активной мощности в режиме холостого хода ВЛЭП. Потери мощности на корону (D R кор) обусловлены ионизацией воздуха вокруг проводов. Когда напряжённость электрического поля у провода становится больше электрической прочности воздуха (21,2кВ/см), на поверхности провода образуются электрические разряды. Из-за неровностей поверхности многопроволочных проводов, загрязнений и заусениц разряды появляются вначале только в отдельных точках провода – местная корона.
По мере повышения напряжённости корона распространяется на большую поверхность провода и в конечном счёте охватывает провод целиком по всей длине – общая корона.
Потери мощности на корону зависят от погодных условий. Наибольшие потери мощности на корону происходят при различных атмосферных осадках. Например, на воздушных ЛЭП напряжением 330¸750кВ DRкор при снеге повышаются на 14%, дожде – на 47%, изморози – на 107% по сравнению с потерями при хорошей погоде. Корона вызывает коррозию проводов, создаёт помехи на линиях связи и радиопомехи.
Реактивная проводимость обусловлена наличием емкости между фазами и между фазами и землей, так как любую пару проводов можно рассматривать как конденсатор.
• Для ВЛЭП величина погонной реактивной проводимости рассчитывается по формулам:
•  для нерасщепленных проводов
для нерасщепленных проводов
, См/км;
•  для расщеплённых проводов
для расщеплённых проводов
• Расщепление увеличивает b 0 на 21¸33%.
• Для КЛЭП величина погонной проводимости чаще рассчитывается по формуле:
b 0 = w × C 0.
• Величина емкости C 0 приводится в справочной литературе для различных марок кабеля.
|
|
• Реактивная проводимость участка сети рассчитывается по формуле:
В = b 0× l.
• У воздушных ЛЭП значение b 0 значительно меньше, чем у кабельных ЛЭП, мало, так как D ср ВЛЭП >> D ср КЛЭП.
• Под действием напряжения в проводимостях протекает ёмкостный ток (ток смещения или зарядный ток):
I c= В × U ф.
•  Величина этого тока определяет потери реактивной мощности в реактивной проводимости или зарядную мощность ЛЭП:
Величина этого тока определяет потери реактивной мощности в реактивной проводимости или зарядную мощность ЛЭП:
• В районных сетях зарядные токи соизмеримы с рабочими токами. При U ном = 110 кВ, величина Q с составляет около 10% от передаваемой активной мощности, при U ном = 220 кВ – Q с ≈ 30% Р. Поэтому ее нужно учитывать в расчетах. В сети номинальным напряжением до 35 кВ величиной Q с можно пренебречь.
4.2 Модель трансформатора
Трансформатор - электромагнитное устройство, не имеющее подвижных частей, служащее для передачи посредством магнитного поля электрической энергии из одной цепи переменного тока в другую без изменения частоты. Трансформатор обеспечивает преобразование уровня напряжений (например,  ) и связывает между собой электрические сети разных классов напряжений. Трансформатор может повышать напряжение (повышающий трансформатор), понижать (например, измерительный трансформатор) или передавать энергию при том же напряжении, при каком он ее получил (разделительный трансформатор). Трансформаторы обладают высоким КПД: от 97% при небольших мощностях до свыше 99% при больших.
) и связывает между собой электрические сети разных классов напряжений. Трансформатор может повышать напряжение (повышающий трансформатор), понижать (например, измерительный трансформатор) или передавать энергию при том же напряжении, при каком он ее получил (разделительный трансформатор). Трансформаторы обладают высоким КПД: от 97% при небольших мощностях до свыше 99% при больших.
В формулах для расчета сопротивлений обмоток трансформатора приняты следующие обозначения и размерности:
∆Pк, кВт - потери мощности в трех фазах (потери короткого замыкания);
∆Pх, кВт - общие потери холостого хода;
Uном, кВ – линейное номинальное напряжение обмотки;
Sном, МВА - номинальная мощность трансформатора;
Iх%, % - ток холостого хода;
Uк, % - напряжение короткого замыкания;
Rт, Xт, Ом – активное и реактивное сопротивления трансформатора;
Gт, Bт , См – активная и реактивная проводимости транформатора.
4.2.1 Двухобмоточный трансформатор
В однолинейных электрических схемах обозначается
Полная схема замещения трансформатора
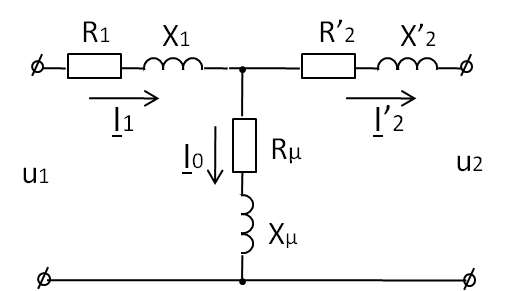
Магнитная связь между первичной и вторичной обмотками заменена электрической связью.
R1, X1 – параметры первичной обмотки: активное сопротивление и индуктивное сопротивление, соответствующие магнитному полю рассеивания первичной обмотки;
|
|
R`2, X`2 – параметры вторичной обмотки, приведенные к первичной: активное сопротивление и индуктивное сопротивление, соответствующие магнитному полю рассеивания вторичной обмотки;
Xµ - индуктивное сопротивление, соответствующее основному магнитному потоку в сердечнике;
Rµ - активное сопротивление пропорционально потерям активной мощности в магнитопроводе.
Параметры вторичной обмотки отличаются от параметров первичной обмотки тем больше, чем больше коэффициент трансформации, а это затрудняет расчеты и построение векторных диаграмм. Поэтому все параметры приводят к одинаковому числу витков, обычно к w1. Вместо реального трансформатора с коэффициентом трансформации  получают эквивалентный трансформатор с коэффициентом трансформации равным единице. Такой трансформатор называют приведенным.
получают эквивалентный трансформатор с коэффициентом трансформации равным единице. Такой трансформатор называют приведенным.

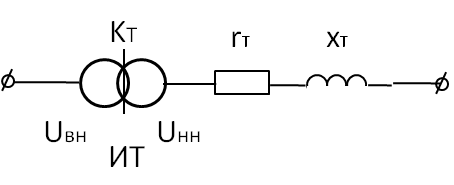
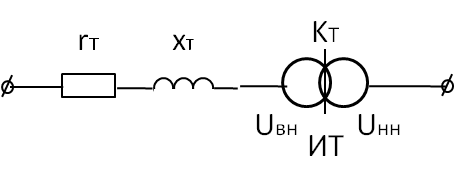
В схему замещения трансформаторов включается идеальный трансформатор (ИТ), моделирующий КТ, то есть преобразование (понижение или повышение) напряжения переменного тока одного класса напряжения в другой.
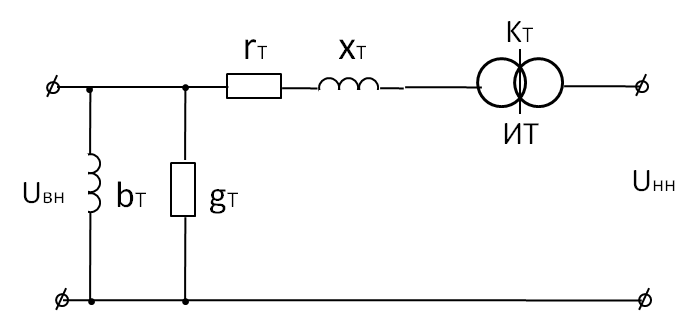
Рисунок – Схема замещения двухобмоточного трансформатора
Все параметры схемы замещения определяются по каталожным данным, составленным по результатам опытов холостого хода и короткого замыкания.
При расчетах режимов кз, а также нормального, ремонтного, аварийного режимов, элементы Xµ, Rµ не оказывают влияние на ток в цепи. Поэтому в практических расчетах ими пренебрегают. Получаем схему замещения
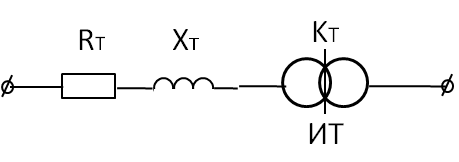
| 
|
Активное сопротивление обмоток двухобмоточного трансформатора определяется по формуле
| (4.5) |
 ;
; 
 - номинальное линейное напряжение той обмотки, к которой приводится сопротивление трансформатора.
- номинальное линейное напряжение той обмотки, к которой приводится сопротивление трансформатора.
Полное сопротивление трансформатора определяется напряжением короткого замыкания. Полное сопротивление трансформатора
| (4.6) |
Реактивное сопротивление обмоток трансформатора
| (4.7) |
Для трансформаторов большой мощности (выше 1000 кВА)  . Поэтому для мощных трансформаторов с достаточной степенью точности можно принять
. Поэтому для мощных трансформаторов с достаточной степенью точности можно принять

| (4.8) |
Активная проводимость трансформатора
|
|
| (4.9) |
Реактивная проводимость ветви намагничивания
| (4.10) |
Как правило, значения активной и реактивной проводимостей трансформатора весьма незначительны, поэтому при расчете установившихся и переходных режимов обычно принимают 
Пример
Дан трансформатор со следующими параметрами
Sном=40 МВА
Uном=115/38,5 кВ
uк=10,5%
Pк=170 кВт
Решение:
1. Расчет в именованных единицах
а) Все приведем к обмотке низшего напряжения
| |

| |

|
б) Все приведем к обмотке высокого напряжения
| |

| |

|
2. Расчет в относительных единицах
Sб =Sном=40 МВА
Uб1 =Uвн=115 кВ
Uб2 =Uнн=38,5 кВ
Сопротивления будут одинаковыми независимо от того к какой обмотке приводим. Для обмотки высокого напряжения по формулам (4.6), (4.5), (2.3)

|

|
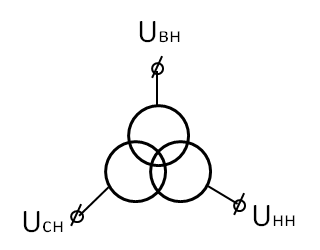
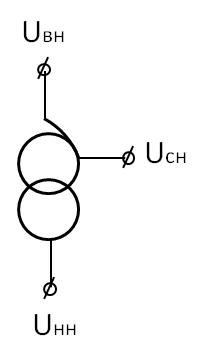
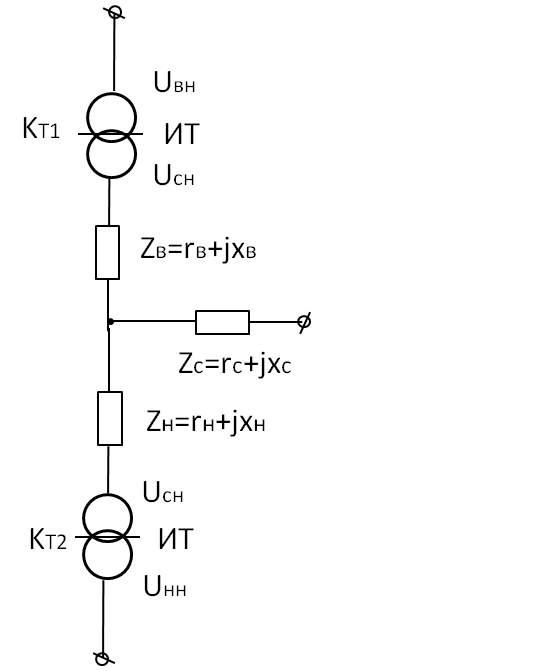
4.2.2 Трехобмоточные трансформаторы
А́втотрансформа́тор — вариант трансформатора, в котором первичная и вторичная обмотки соединены напрямую, и имеют за счёт этого не только магнитную связь, но и электрическую. Обмотка автотрансформатора имеет несколько выводов (как минимум 3), подключаясь к которым, можно получать разные напряжения.
В однолинейных электрических схемах обозначается
| 
|
| Трехобмоточный трансформатор | Автотрансформатор |
Для трехобмоточных трансформаторов и автотрансформаторов задают три значения:
- напряжения, UВН/UСН/UНН
- напряжения короткого замыкания между попарно взятыми обмотками, т.е. uк% В-С, uк% В-Н, uк% С-Н,
- потери короткого замыкания, т.е.  Pк В-С, Pк В-Н, Pк С-Н.
Pк В-С, Pк В-Н, Pк С-Н.
Нужно определить uк и Pк для каждой обмотки

| (4.11) |

| (4.12) |

| (4.13) |

| (4.14) |

| (4.15) |

| (4.16) |
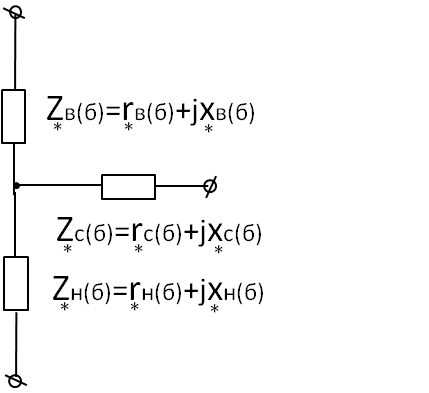
Поэтому минимальное число ветвей схемы равно трем. Схему замещения представляют в виде трехлучевой звезды с сопротивлениями ZВ, ZС, ZН. Эти сопротивления не являются физическими сопротивлениями обмоток высшего, среднего и низшего напряжения, а представляют собой математические величины.
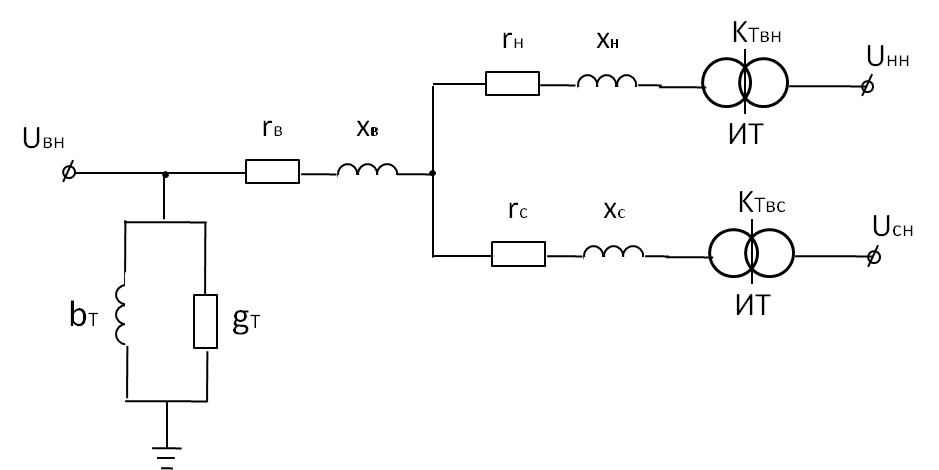
Реактивные сопротивления обмоток определяются по формулам
| (4.17) |
| (4.18) |
| (4.19) |
Реактивное сопротивление xC, соответствующее обмотке СН, расположенной между обмотками НН и ВН, благодаря их взаимному влиянию, обычно имеет значение, близкое к нулю, либо небольшое отрицательное значение. В этом случае сопротивление данной ветви в расчетах принимают равным нулю или 0,001 Ом.
Активные сопротивления обмоток определяют по формулам
| (4.20) |
| (4.21) |
| (4.22) |
Если заданы потери короткого замыкания на одну пару обмоток, например,  , то расчет выполняют по формуле
, то расчет выполняют по формуле
| (4.23) |
Параметры ветви намагничивания определяются так же, как и для двухобмоточных трансформаторов по (4.9), (4.10).
Пример
Дан трехобмоточный трансформатор
|
|
Sном=40 МВА
Uном=115/38,5/10,5 кВ
uк%В-С=10,5%; uк%В-Н=17%; uк%С-Н=6%
Pк=230 кВт
Решение:
1. Расчет в именованных единицах
Приведем сопротивления трансформатора к обмотке средней ступени
Коэффициенты трансформации
Рассчитаем напряжение короткого замыкания для каждой обмотки по формулам (4.11)-(4.13)

|

|

|
Рассчитаем индуктивные сопротивления по формулам (4.17)- (4.19)
|
 Ом Ом
|
|
Определим активное сопротивление для каждой из пар обмоток

Тогда активное сопротивление каждой обмотки

|
2. Расчет в относительных единицах
Примем базисные единицы
Sб =Sном=40 МВА
Uб1 =Uвн=115 кВ
Uб2 =Uсн=38,5 кВ
Uб2 =Uнн=10,5 кВ
Сопротивления будут одинаковыми независимо от того к какой обмотке приводим. Индуктивные сопротивления для средней ступени напряжения по формулам (4.6), (4.5), (2.3)

|

|

|
Определим активные сопротивления для пар обмоток

|
Тогда активное сопротивление каждой обмотки по формуле (4.23)

В сложных схемах с Uном>10 кВ активное сопротивление обмотки среднего напряжения можно не учитывать.
4.2.3 Двухобмоточный трансформатор с расщепленной обмоткой низкого напряжения
Трансформаторы с расщепленными обмотками НН обеспечивают возможность присоединения нескольких генераторов к одному повышающему трансформатору. Трансформатор с расщепленной обмоткой снижает уровни КЗ в сети НН.
В однолинейных электрических схемах обозначается
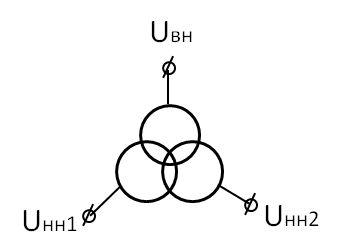
Трансформаторы с расщепленной обмоткой являются разновидностью двухобмоточного трансформатора. В таком трансформаторе обмотка НН выполнена из двух обмоток, расположенных симметрично по отношению к обмотке ВН. Схема замещения трансформатора с расщепленной обмоткой имеет вид трехлучевой звезды, где rН1, rН2, xН1, xН2 – активные и индуктивные сопротивления расщепленных обмоток.
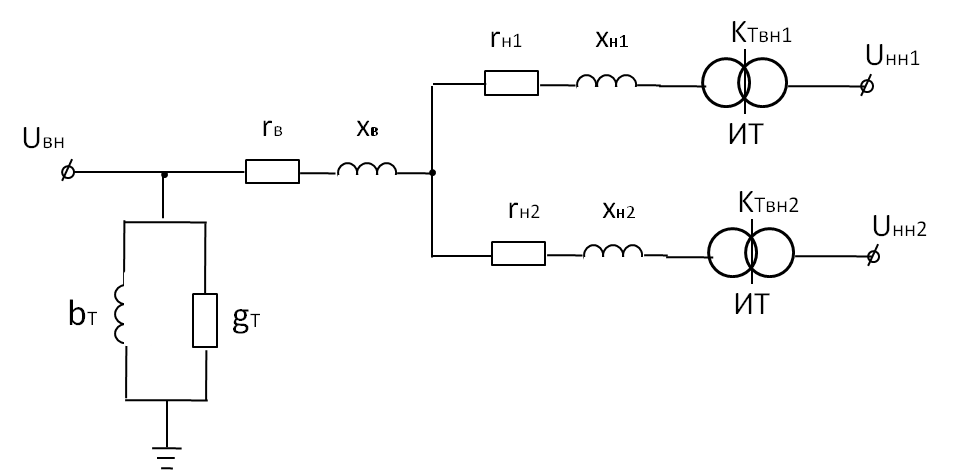
Сопротивления трансформатора между выводами обмотки ВН и выводами обмоток НН-1, НН-2 будут равны так называемым общим (сквозным) сопротивлениям трансформатора
| (4.24) |
| (4.25) |
Мощность каждой обмотки НН равна половине мощности обмотки ВН, то есть половине номинальной мощности трансформатора, следовательно, сопротивления

| (4.26) |
С учетом данного соотношения сопротивлений имеем

| (4.27) |
Реактивные сопротивления обмоток буду равны

| (4.28) |
где  - коэффициент расщепления обмоток
- коэффициент расщепления обмоток
| (4.29) |
 - паспортные данные; напряжение короткого замыкания между обмотками ВН и параллельно соединенными частями обмоток НН;
- паспортные данные; напряжение короткого замыкания между обмотками ВН и параллельно соединенными частями обмоток НН;
 паспортные данные; напряжение короткого замыкания между частями расщепленной обмотки НН.
паспортные данные; напряжение короткого замыкания между частями расщепленной обмотки НН.
В отсутствии данных для трехфазных трансформаторов, у которых разные части расщепленной обмотки НН каждой фазы находятся на одном стержне принимают 
Из формулы (4.29) получаем выражения для расчета индуктивного сопротивления трансформатора с расщепленной обмоткой НН

| (4.30) |
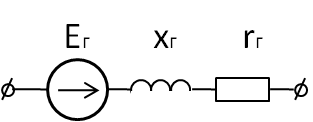
4.3 Токоограничивающий реактор
Токоограни́чивающий реа́ктор — электрический аппарат, предназначенный для ограничения ударного тока короткого замыкания. Включается последовательно в цепь, ток которой нужно ограничивать и работает как индуктивное (реактивное) дополнительное сопротивление, уменьшающее ток и поддерживающее напряжение в сети при коротком замыкании, что увеличивает устойчивость генераторов и системы в целом.
В однолинейных электрических схемах обозначается

Паспортные данные (исходные параметры)
Uном, кВ
Iном, кА
xр, Ом (о.е.)
Pр, кВт
Схема замещения имеет следующий вид
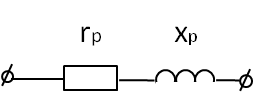
Сопротивления рассчитывают по формулам
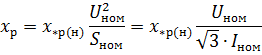
| (4.31) |
| (4.32) |
Сдвоенный реактор
В однолинейных электрических схемах обозначается
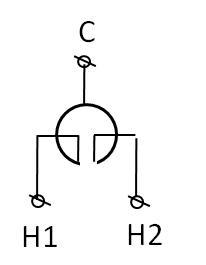
Схема замещения сдвоенного токоограничивающего реактора представляет собой трехлучевую звезду.
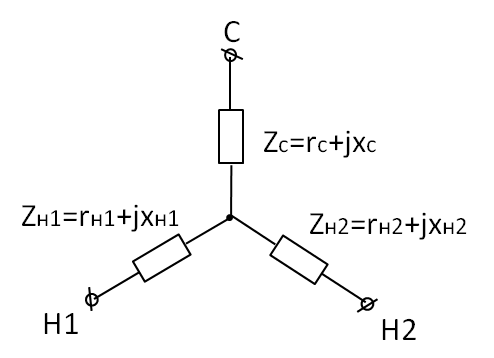
Индуктивное сопротивление со стороны среднего зажима (т.е. зажима, обращенного в сторону источника энергии) равно
| (4.33) |
а индуктивные сопротивления двух других ветвей одинаковы и составляют

| (4.34) |
где  – коэффициент связи между ветвями реактора, каталожный данный;
– коэффициент связи между ветвями реактора, каталожный данный;
 номинальное индуктивное сопротивление одной ветви реактора при отсутствии тока в другой ветви.
номинальное индуктивное сопротивление одной ветви реактора при отсутствии тока в другой ветви.
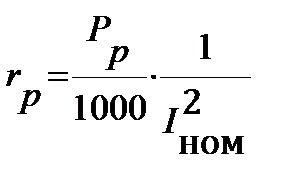
Активные сопротивления реактора

| (4.35) |
| (4.36) |
4.4 Синхронные машины
Синхронная машина — это электрическая машина переменного тока, частота вращения ротора которой равна частоте вращения магнитного поля в воздушном зазоре. Синхронная машина может работать в режимах двигателя и генератора.
Генератор - устройство, преобразующее один вид энергии в другой (преобразование механической энергии вращения в электрическую). Различают два типа таких генераторов: синхронные и асинхронные.
Отличительным признаком синхронного генератора является жёсткая связь между частотой f переменной ЭДС, наведённой в обмотке статора, и частотой вращения ротора n, называемой синхронной частотой вращения:
n = f / p
где p – число пар полюсов обмотки статора и ротора.
В однолинейных электрических схемах генератор обозначается

Исходные параметры синхронной машины:
- Pном, МВт - номинальная мощность;
- cosφном - номинальный коэффициент мощности;
- Uном, кВ - номинальное напряжение;
-  сверхпереходное индуктивное сопротивление по продольной оси;
сверхпереходное индуктивное сопротивление по продольной оси;
-  - переходное индуктивное сопротивление по продольной оси;
- переходное индуктивное сопротивление по продольной оси;
-  - синхронное индуктивное сопротивление по продольной оси;
- синхронное индуктивное сопротивление по продольной оси;
-  - индуктивное сопротивление обратной последовательности;
- индуктивное сопротивление обратной последовательности;
- Tа, с- постоянная времени затухания апериодической составляющей тока якоря.
Справедливо соотношение для индуктивных сопротивлений

Реактивные сопротивления синхронной машины носят название «операторные сопротивления» потому, что машина в статическом режиме описывается математическими зависимостями, в которые входят реактивные сопротивления, отражающие статический режим. В переходном процессе, например, при коротком замыкании, машина описывается математическими зависимостями, которые включают в себя параметры, изменяющиеся во времени: в начальный период переходный процесс, называется сверхпереходным процессом, определяется сверхпереходными реактивными сопротивлениями; по окончании сверхпереходного процесса, собственно переходный процесс, отражается переходными реактивными сопротивлениями и, наконец, после окончания переходного процесса машина имеет синхронные реактивные сопротивления установившегося режима.
Введем обозначение:
(0) – величины предшествующего КЗ режима;
/0/ - начальный момент КЗ (непосредственно после коммутации).
Для расчета переходных процессов, в том числе при коротких замыканиях, необходимы режимные параметры предшествующего режима:
напряжение, нагрузка и коэффициент мощности в момент, предшествующий переходному процессу: U(0), P(0)/Pном, cosφ(0).
U(0) – напряжение на выходных клеммах синхронной машины в предшествующем режиме. При отсутствии данных принимается равным номинальному U(0)= Uном.
P(0) – активная мощность, отдаваемая в сеть в предшествующем режиме. При отсутствии данных принимается равным номинальному P(0)= Pном.
cosφ(0) – коэффициент мощности нагрузки синхронной машины в предшествующем режиме. При отсутствии данных принимается равным номинальному cosφ(0)= cosφном.
Параметры предшествующего режима в относительных единицах при номинальных условиях
| (4.37) |
| (4.38) |
| (4.39) |
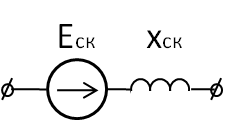
Схема замещения синхронного генератора
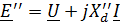
Для расчета начального действующего значения периодической составляющей тока КЗ аналитическим методом по принятой исходной расчетной схеме предварительно следует составить эквивалентную схему замещения, в которой синхронные и асинхронные машины должны быть представлены предварительно приведенными к базисной ступени напряжения или выраженными в относительных единицах при выбранных базисных условиях сверхпереходными сопротивлениями ( ) и сверхпереходными ЭДС. Исходные значения сверхпереходных ЭДС следует принимать численно равными их значениям в момент, предшествующий КЗ.
) и сверхпереходными ЭДС. Исходные значения сверхпереходных ЭДС следует принимать численно равными их значениям в момент, предшествующий КЗ.
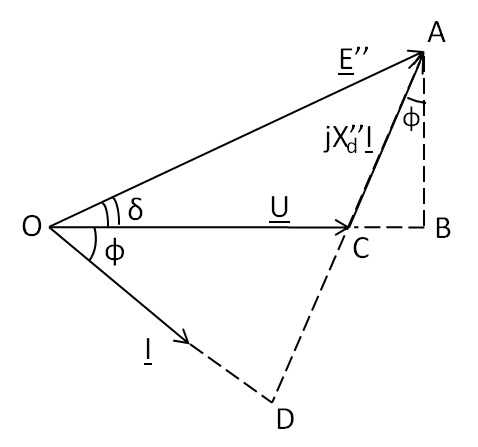
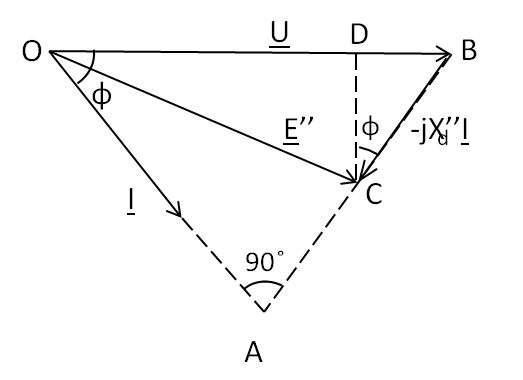
Сверхпереходная ЭДС находится из упрощенной векторной диаграммы синхронной машины (СГ), работающей с отстающим током
|
δ – угол нагрузки;
φ – угол между током и напряжением
|
ЭДС определяется из двух прямоугольных треугольников:
- из ∆OAD

| |

| (4.40) |
- из ∆ОAB

| |

| (4.41) |
В формулах (4.40), (4.41) знак «+» относится к синхронным машинам, которые к моменту КЗ работали в режиме перевозбуждения, а знак «-» - к работавшим с недовозбуждением.
В формулы (4.40), (4.41) можно подставлять режимные параметры как в именованных единицах, так и в относительных единицах.
Если при расчете тока КЗ применяется система относительных единиц с приведением значений параметров элементов расчетной схемы к выбранным базисным условиям, то в формулы (4.40), (4.41) целесообразно подставлять  в относительных единицах при номинальных условиях машины, т.е. соответственно
в относительных единицах при номинальных условиях машины, т.е. соответственно  :
:

| (4.42) |
где 

| (4.43) |
Приблизительное значение ЭДС в относительных единицах равно

|
Полученную при этом ЭДС  следует затем привести к базисным условиям
следует затем привести к базисным условиям
| (4.44) |
где  - напряжение той ступени, на которой находится синхронная машина.
- напряжение той ступени, на которой находится синхронная машина.
Если дальнейший расчет проводится в именованных единицах, то ЭДС  пересчитываем по формуле
пересчитываем по формуле

| (4.45) |
Активное сопротивление синхронной машины rа дается в виде сопротивления обмоток якоря, либо рассчитывается по формуле

| (4.46) |
где  - синхронная угловая частота напряжения сети.
- синхронная угловая частота напряжения сети.
Реактивное сопротивление синхронной машины нужно перевести из относительных единиц, рассчитанных при номинальных условиях оборудования, в именованные единицы по формуле
 Xг=Xd``*U2ном/Sном
Xг=Xd``*U2ном/Sном
| испр |
4.4.1 Синхронные компенсаторы
Синхронный компенсатор (СК) представляет собой синхронную машину, предназначенную для генерирования реактивной мощности необходимой для работы некоторых потребителей (например, асинхронные двигатели). Синхронные компенсаторы являются генераторами и потребителями реактивной мощности. Они включаются в систему вблизи мощных узлов нагрузки. Синхронные компенсаторы позволяют разгружать линии электропередачи от реактивных токов, повышая их использование и поддерживая заданный уровень напряжения в системе.
В однолинейных электрических схемах СК обозначается
Синхронный компенсатор, включенный в сеть, работает как синхронный двигатель без нагрузки, т.е. в режиме холостого хода, и вырабатывает реактивную мощность, необходимую для работы потребителя, например группы асинхронных двигателей.
Схема замещения синхронного компенсатора
Для синхронных компенсаторов сверхпереходную ЭДС в предшествующем режиме следует определять по формуле

|
В формуле знак «+» относится к синхронным машинам, которые к моменту КЗ работали в режиме перевозбуждения, а знак «-» - к работавшим с недовозбуждением.
4.5 Асинхронные машины
Асинхронные генераторы (АГ) принципиально отличаются от синхронных отсутствием жесткой зависимости между частотой вращения ротора и вырабатываемой ЭДС. Разницу между этими частотами характеризует коэффициент s - скольжение.
s = (n - n r )/n
где n - частота вращения магнитного поля (частота ЭДС);
n r - частота вращения ротора.
В однолинейных электрических схемах обозначается
Исходные параметры асинхронных двигателей (АД):
- Pном, МВт - номинальная мощность;
- cosφном - номинальный коэффициент мощности;
- Uном, кВ - номинальное напряжение;
- sном  номинальное скольжение;
номинальное скольжение;
-  - кратность пускового тока по отношению к номинальному току;
- кратность пускового тока по отношению к номинальному току;
-  - кратность максимального момента по отношению к номинальному моменту;
- кратность максимального момента по отношению к номинальному моменту;
-  - кратность пускового момента по отношению к номинальному моменту;
- кратность пускового момента по отношению к номинальному моменту;
- R, Ом – активное сопротивления обмотки статора при рабочей температуре;
- η – коэффициент полезного действия.
Кроме того, для расчета переходных процессов необходимо знать напряжение U(0) , ток статора I(0) и коэффициент мощности cosφ(0) в момент времени, предшествующий переходному процессу.
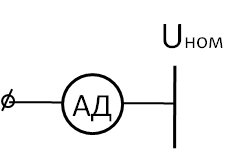
Схема замещения асинхронного двигателя

В расчетной схеме асинхронные электродвигатели должны быть учтены сверхпереходным сопротивлением и сверхпереходной ЭДС. Асинхронные электродвигатели в начальный момент короткого замыкания можно рассматривать как синхронные электродвигатели, работающие с недовозбуждением, поэтому их влияние на начальный ток в месте короткого замыкания зависит от удаленности точки короткого замыкания.
Сверхпереходная ЭДС асинхронного электродвигателя до короткого замыкания при его работе с недовозбуждением определяется из векторной диаграммы
По формулам из двух прямоуго
|
|
|

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!