

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Марксистская теория происхождения государства: По мнению Маркса и Энгельса, в основе развития общества, происходящих в нем изменений лежит...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Интересное:
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
В системах СВС — ПН в бесконтактном аналоговом вычислителетеле решаются расчетные формулы относительно высоты Н, скорости VH, числа М соответственно. Для вычисления истинной воздушной скорости V используется формула, полученная следующим образом.
Как указывалось, температура торможения
 (2.1)
(2.1)
Учитывая, что скорость звука  , выражение (2.1) можно переписать как
, выражение (2.1) можно переписать как
 (2.2)
(2.2)
Поскольку  то с учетом формулы (2.2) расчетная зависимость для скорости
то с учетом формулы (2.2) расчетная зависимость для скорости
 (2.3)
(2.3)
Относительная барометрическая высота
Нотн = Н - Нз
где Нз - абсолютная барометрическая высота на уровне Земли, относительно которой отсчитывается Нотн.
Отклонения числа М, скорости VHt высоты Н от заданных значений Мзад, Vизад, Нзад находятся из выражений:

Элементы входящие в состав систем типа СВС — ПН, представлены на рис. 2.3. В состав систем СВС—ПН могут входить также вычислители аэродинамических поправок (ВАП), законы формирования которых зависят от типа самолета.
Вычислитель скорости, числа М и высоты ВС MB работает при подаче на его вход сигналов: давлений р и рп от приемников воздушных давлений; температуры торможения Тт в виде сопротивления RТ от приемника температуры заторможенного потока; высоты Нз заданного уровня Земли от указателя относительной барометрической высоты УВО. Ввод сопротивления, пропорционального высоте Нз как функции давления р3 на заданном уровне Земли, осуществляется функциональным потенциометром, воспроизводящим функцию Нз = f(p), при вращении ручки ввода давления р3 на лицевой части указателя УВО.
Системы свс с вычислительными устройствами, совмещенными с указателями
В системах СВС с вычислительными устройствами, совмещенными с указателями, решаются те же зависимости, что и в системах типа СВС—ПН.
|
|
В основу вычислительных устройств здесь положены мостовые схемы. Для определения числа М используется потенциометрическая схема деления, для нахождения температуры Т наружного воздуха и скорости V — реостатные мостовые схемы умножения, для вычисления высоты Нотн — потенциометрическая схема вычитания. Во всех этих схемах на вход усилителя следящей системы поступает сигнал рассогласования с задающих и отрабатывающих потенциометров, который после усиления приводит во вращение ротор двигателя. Двигатель через редуктор перемещает щетки потенциометра отработки и выходных потенциометров (подвижные элементы синусно-косинусных трансформаторов), а также стрелку визуального отсчета. Двигатель реверсируется за счет изменения фазы сигнала рассогласования.
Блок датчиков давлений БД. Он состоит из датчиков статического р и динамического давлений рдин,элементов встроенного контроля и трансформаторов, обеспечивающих электрическое питание. Относительные сопротивления, пропорциональные выходным параметрам р, Н, рдин, VИ, выдаются функциональными потенциометрами блока, щетки которых соединены с двигателями следящих систем.
По кинематической схеме и принципу действия датчик статического давления р аналогичен корректору КЗВ в режиме «обнуления» Датчик динамического давления рдин отличается от датчика статического давления р лишь УЧЭ (манометрическая коробка) и выходными фукциональными потенциометрами.
Указатель Нотн (рис. 2.11). Данный указатель построен по типовой потенциометрической мостовой схеме вычитания, решающей зависимость Нотн = Н - Нзад. Входными величинами являются: высота Н в виде перемещения y (Н) щетки потенциометра В2 (входит в состав блока БД); высота Нзад в виде перемещения х щетки потенциометра В1 в результате поворота ручки ввода Нзад. Значение Нзад отражается на счетчике Сч. Автоматическое действие моста достигается за счет следящей системы, состоящей из усилителя У, двигателя М и редуктора Р`. При изменении переменной у или х равновесие моста нарушается и на вход усилителя поступает сигнал рассогласования. Двигатель М, перемещая щетку потенциометра В3, восстанавливает равновесие моста. Условием равновесия моста является равенство
|
|

Рис. 2.3. Структурная схема системы типа СВС-ПН
Вычислитель питается через фильтр Ф переменным током (115 В, 400 Гц) и через блок питания БП постоянным током. Напряжения, пропорциональные параметрам Н, Нотн, V, преобразуются в соответствующие сопротивления блоками БПнП.
Сигналы в каналах Нотн, V, М усиливаются блоками питания с усилителями БЛУ,работающими в комплектах с указателями УВО, воздушной и путевой скорости УСВПк, числа М УМ. При соответствующей установке переключателя, на указателе УСВПк системы СВС — ПН дают возможность индикации путевой скорости Vn no данным доплеровского измерителя ДИСС.
Вычислитель ВСМВ. Он предназначен для решения и выдачи в виде напряжений сигналов, пропорциональных Н, Hотн, M и V. Вычислитель ВСМВ (рис. 2.4) состоит из индукционных датчиков статического и динамического давления ДДСИ и ДДДИ, функциональных преобразователей напряжения ПНФ, полупроводниковых усилителей У, трансформаторов Т. В вычислителе ВСМВ при решении приведенных выше зависимостей используется метод суммирования электрических сигналов. Этим объясняется логарифмирование параметров, входящих в расчетные зависимости.
Зависимости прогибов УЧЭ датчиков ДДСИ и ДДДИ от давлений меняются по логарифмическому закону. Характеристики индукционных преобразователей этих датчиков являются линейными. В связи с этим характеристики датчиков ДДСИ и ДДДИ по давлениям в целом меняются по логарифмическому закону. В целях упрощения изложения в тексте и на рис. 2.4 коэффициенты пропорциональности опущены.

Рис. 2.4. Функциональная схема вычислителя ВСМВ

Рис. 2.5. схема умножения с помощью трансформатора
Основные функциональные преобразования в соответствии с расчетными формулами осуществляются преобразователями ПНФ(ПНФ1 и ПНФ2 — АЛЯ ДДСИ, ПНФЗ — ддя ДДДИ). С помощью ПНФ4 получается сигнал в виде напряжения U9, пропорциональный числу М. ПНФ5 в канале скорости V позволяет получить сигнал в виде напряжения
|
|
 (2.4)
(2.4)
Этот сигнал подается через усилитель У11 на первичную обмотку трансформатора ТЗ, реализующего формулу (2.3). Ввод величины  обеспечивается за счет изменения входного сопротивления трансформатора ТЗ при изменении сопротивления Rт, подключенного к его вторичной обмотке L2 (рис. 2.5).
обеспечивается за счет изменения входного сопротивления трансформатора ТЗ при изменении сопротивления Rт, подключенного к его вторичной обмотке L2 (рис. 2.5).
Сопротивление, приведенное к первичной обмотке L1 трансформатора с коэффициентом трансформации KT, R’T = RT/ K2T.
На выходе трансформатора ТЗ (без учета входного сопротивления усилителя У12 и сопротивлений обмоток трансформатора) напряжение
 (2.5)
(2.5)
В приведенной схеме напряжение Uвх пропорционально функции f (M)v а отношение R’T / (R + R’T) пропорционально величине . Поэтому выражение (2.5) определяет скорость V. После суммирования с начальным напряжением U06 это напряжение (U13) через усилитель У12 и размножающий трансформатор Т4 поступает к потребителям (см. рис. 2.4).
Полупроводниковые усилители У1...У2 предназначены для усиления сигналов по мощности и напряжению. С трансформаторов начальных значений, не показанных на рис. 2.4, в каналы параметров Н, Нотн, V, числа М вводятся сигналы U01 — U06 начальных напряжений для компенсации ненулевых остаточных сигналов и фазовых искажений в каналах системы.
На входы усилителей У1, У4, У6 могут подаваться контрольные сигналы Uэт1 и Uэт2 встроенного контроля, соответствующие тестовым значениям р и р дин. К вторичной обмотке трансформатора ТЗ вместо сопротивления RТ подключается в этом случае сопротивление RТ.
Датчики ДДСИ и ДДДИ. Эти датчики имеют одинаковые принципиальные схемы и отличаются лишь УЧЭ: в ДДСИ применяется анероидная коробка, а в ДДДИ—манометрическая коробка. В датчике ДДСИ (рис. 2.6) имеются два индукционных преобразователя. Каждый индукционный преобразователь состоит из двух неподвижных первичных обмоток L1, L2 (L3, L4), включенных встречно, и подвижной вторичной обмотки L5 (L6), Вторичная обмотка перемещается жестким центром анероидной коробки Е. Обмотки L5, L6 включены последовательно. Перемещение жестких центров анероидных коробок встречное, что позволяет исключить погрешности от ускорений вдоль осей обмоток. Изменение статического давления р приводит к перемещению подвижных обмоток относительно неподвижных. В них наводятся ЭДС, которые суммируются. С выхода датчика снимается напряжение U1 = f (lgp).
|
|
Для уменьшения температурных погрешностей датчика используется термостатирование с помощью нагревательного элемента В, реле К5 и биметаллических термоэлементов S1 и S2. Поддерживаемая температура (45±5) °С. При увеличении температуры элемент S1 разрывает цепь питания реле К5. При отказе элемента S1 и температуре 60 °С срабатывает элемент S2.
Смещение нуля выходного сигнала устраняется мостиковым термокомпенсатором первого рода, состоящим из резисторов R9 — R12. Изменение наклона характеристики датчика компенсируется термокомпенсатором второго рода с помощью резисторов R7, R8.
Преобразователи ПНФ. Заданная функция Uвых = f (UBX) в преобразователях ПНФ воспроизводится методом кусочно-линейной аппроксимации. Преобразователи ПНФ состоят из отдельных ячеек, каждая из которых рассчитана на аппроксимацию функции одним отрезком. Так как все решаемые зависимости, кроме соотношения (2.3), на рабочих участках представляются вогнутыми либо выпуклыми, рассмотрим преобразователи ПНФ для воспроизведения этих двух видов функций.

Рис. 2.6. Принципиальная схема датчика статического давления типа ДДСИ
В схеме ПНФ постоянного тока (рис. 2.7, а) при Uвх = 0 все ячейки заперты опорными напряжениями источников G1 — GN. При увеличении UBX напряжение Uвых на выходе растет линейно, причем наклон первого участка (рис. 2.7, б) определяется резисторами R1, Rн. При Uвх = Ut ≥ UG1 диод VI открывается и резистор R2 шунтирует резистор Rн. Крутизна характеристики меняется. Остальные ячейки работают так же.

Схема ПНФ переменного тока для воспроизведения выпуклых функций (рис. 2.8, а) состоит из ячеек с резисторами и диодами. Количество ячеек соответствует числу аппроксимирующих отрезков. Выходное напряжение снимается с резистора R. Конденсатор С предназначен для регулировки фазы UBX.
Рассмотрим работу схемы на примере работы первой ячейки, состоящей из резисторов R2, r1, r’1 и диодов VI, V’I. Опорные напряжения Uо оп1 и U’оп1 равны между собой. Резисторы rl и г'1 образуют две параллельные цепи, питаемые через диоды VN и V’N опорным напряжением Uon. Пусть в положительный полупериод синфазных напряжений UBX и Uon потенциалы на элементах схемы распределены так, как это показано на рис. 2.8, а. Диод VN открыт. В результате возникает опорное напряжение U оп1.
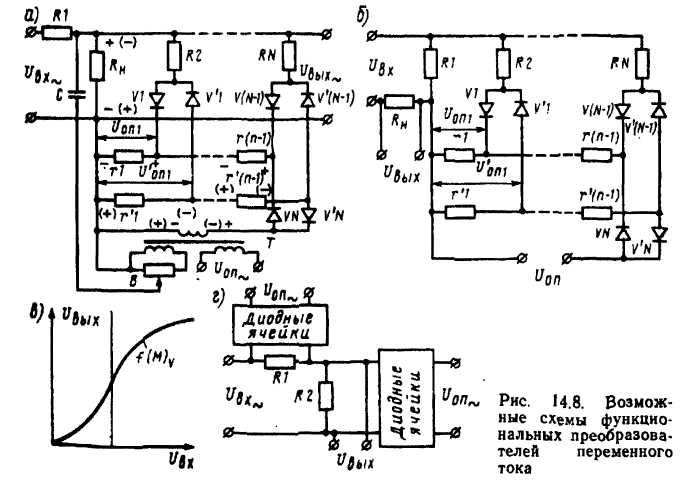
Диод V1 при 0 < Uвых < U оп1 закрыт опорным напряжением U оп1, а V’1 закрыт напряжением Uвых. При отрицательном полупериоде напряжений Uвх и Uоп (потенциалы указаны в скобках) диод V’N открыт. Функции запирающих напряжений поменяются, диоды V1 и V’1 будут закрыты, ток по резистору R2 не протекает.
|
|
С ростом Uьх при Uвых > U оп1 диод V1 (V’1) откроется, резистор Rн зашунтируется резистором R2. Крутизна характеристики Uвых= f (Uвх) на втором участке уменьшится. При UBbIX > Uоп2 откроется вторая ячейка и подключится резистор R3 и т. д.
Схема ПНФ для воспроизведения вогнутых функций (рис. 2,8,б) работает аналогично. Отличие от схемы ПНФ по рис. 2.8, а состоит лишь во включении резистора RH. Условием отпирания первой ячейки ПНФ здесь служит неравенство Uвх — Uвых> U оп1.
Крутизна характеристики Uвых = f (Uвх) возрастает, так как шунтирующий резистор R2 подключается параллельно ограничивающему резистору R1.
Преобразователь ПНФ5 (см. рис. 2.4) для воспроизведения зависимости f(M)v, приведенной на рис. 2.8, в, представляет комбинацию двух ПНФ (рис. 2.8, г), один из которых служит для воспроизведения вогнутых, а другой — выпуклых функций. С увеличением Uвх первыми открываются диодные ячейки, шунтируемые резистором R1, а затем ячейки, шунтируемые резистором R2.
Точность воспроизведения характеристик зависит от числа аппроксимированных участков заданной функции, а следовательно, числа ячеек ПНФ.
Блок БПнП. Он построен по принципу самобалансирующейся мостовой схемы. Блок (рис. 2.9, а) состоит из электрического моста, усилителя У, двигателя-генератора ДГ потенциометра отработки Пос, выходных потенциометров Пвых.
Поступающее на вход напряжение Uвх из вычислителя сравнивается с помощью мостовой схемы с напряжением, снимаемым с потенциометра Ясс- Сигнал рассогласования через усилитель У поступает на управляющую обмотку двигателя-генератора ДГ вращение которого передается на щетки потенциометров Пос и Пвых и продолжается,
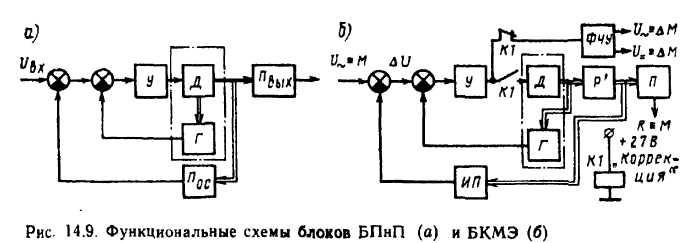
Рис. 2.9. Функциональные схемы блоков БПнП (а) и БКМЭ (б)
пока существует это рассогласование. Сопротивление потенциометров Пвых при этом соответствует входному напряжению.
В схеме используется лекальный корректор (на рисунке не показан), предназначенный для компенсации систематических инструментальных погрешностей. Дополнительный поворот щеток потенциометров Пос и Пвых на величину поправки обеспечивается регулировкой профиля лекала корректора.
Для улучшения работы следящей системы в динамическом режиме в схеме использовано напряжение отрицательной обратной связи, выдаваемое генераторной об моткой двигателя-генератора ДГ.
Блок БКМЭ. Он выдает сигнал, пропорциональный ∆М, в виде напряжений постоянного и переменного тока.

Рис. 2.10. Принципиальная схема указателя УВО
На вход блока БКМЭ (рис. 2.9, б) поступает сигнал, пропорциональный числу М, в виде напряжения переменного тока частотой 400 Гц. В режиме слежения сигнал сравнивается с сигналом, снимаемым с индукционного преобразователя угла ИП. Сигнал рассогласования ∆U через усилитель У подается на обмотку управления двигателя-генератора ДГ, выходной вал которого через редуктор Р' вращает подвижной элемент ИП и щетки выходных потенциометров П. Вращение продолжается, пока сигнал рассогласования не станет равным нулю. Каждому значению числа М в режиме слежения соответствует определенное значение выходного сопротивления R потенциометров П. Назначение генераторной обмотки Г такое же, как и в блоке БПнП.
Режим коррекции включается при подаче сигнала «коррекции» (+27 В) на обмотку реле K1. При этом к выходу усилителя У подключается фазочувствительный усилитель ФЧУ, двигатель-генератор отключается. В результате при изменении сигнала на входе блока БКМЭ на выходе ФЧУ появятся сигналы, пропорциональные ∆М. При снятии сигнала «коррекции» блок БКМЭ продолжает работать в режиме слежения.
Указатель УВО. Он состоит (рис. 2.10) из канала отработки и индикации величины Нотн и канала выдачи относительного сопротивления, пропорционального величине Н3 как функции давления рз.
Канал Нотн построен по принципу самобалансирующейся мостовой схемы. Поступающий с выхода вычислителя электрический сигнал Uвх пропорциональный величине Нотн, с помощью двигателя М отработки и редуктора Р1 преобразуется в угловое перемещение стрелок и барабанов счетчика Сч. Одновременно двигатель перемещает щетку потенциометра В1 обратной связи и меняет напряжение Uвг в диагонали ВГ моста.
Управляющий сигнал на обмотку ОУ двигателя М следящей системы подается с усилителя блока БПУ, на вход которого поступают разность напряжений Uвх и Uвг, а также сигнал скоростной обратной связи с обмотки ОС генератора G. Малая стрелка на лицевой части указателя служит для отсчета километров, а большая — десятков и сотен метров. Счетчик показывает высоту в километрах.
В равновесном положении схемы Uвх = — Uвг и напряжение на входе блока БПУ равно нулю. Каждому значению Hотн соответствует определенное положение щетки потенциометра В1 и угол поворота стрелок указателя и барабанов счетчика.
Канал H3 состоит из потенциометра В2, редуктора Р2 и счетчика Сч. Давление р3 вводится кремальерой, с которой связаны счетчик и щетка функционального потенциометра В2, выдающего в вычислитель ВСМВ сигнал H3 = f(р3). Обмотки OB1, OB2 являются обмотками возбуждения двигателя и генератора, резисторы R3, R4,R6 — юстировочные.
Указатели УСВПк и УМ. Эти указатели также построены по принципу самобалансирующейся мостовой схемы, их работа аналогична работе указателя УВО с блоком БПУ.
В указателе УСВПк в зависимости от положения переключателя «Возд.— пут.» на фланце указателя следящая система указателя подключается к вычислителю системы СВС или ДИСС
Блоки БПУ. Они обеспечивают усиление сигналов рассогласования в каналах Нотн, V, числа М и питание обмоток возбуждения двигателя и генератора в следящей системе. Блок БПУ состоит из полупроводникового усилителя, трансформатора и конденсатора, обеспечивающего сдвиг фаз на 90° напряжений обмоток возбуждения и управления двигателя. Полупроводниковый усилитель имеет два каскада предварительного усиления, фазовый фильтр, предконечный каскад усиления и выходной усилитель мощности.
Блок питания БП. Он предотвращает амплитудные выбросы значений борт сети постоянного тока. Принцип стабилизации напряжения в блоке основан на сравнении выходного напряжения с опорным напряжением. Разность этих напряжений служит для управления регулирующим элементом через усилитель обратной связи. Блок питания состоит из выпрямителей и стабилизатора напряжения на полупроводниковых элементах.
Фильтр Ф. Он уменьшает нелинейные искажения напряжения бортового источника питания 115 В 400 Гц. Фильтр состоит из последовательного и параллельного колебательных контуров LC, настроенных на резонанс с частотой 400 Гц. Последовательный контур для частоты 400 Гц имеет минимальное сопротивление, параллельный — максимальное. Коэффициент передачи фильтра на частоте 400 Гц близок к единице. На частотах выше 400 Гц резко уменьшается.
Теория гироскопа.
Гироскоп - это массивное аксиально-симметричное тело, вращающееся с большой угловой скоростью вокруг своей оси симметрии.
В этом случае моменты всех внешних сил, включая и силу тяжести, относительно центра масс гироскопа равны нулю. Это можно реализовать, например, поместив гироскоп в карданов подвес, изображенный на рис.1.

Рис.1
При этом

и момент импульса сохраняется:
L=const (2)
Гироскоп ведет себя так же, как и свободнее тело вращения. В зависимости от начальных условий возможны два варианта поведения гироскопа:
1. Если гироскоп раскручен вокруг оси симметрии, то направления момента импульса и угловой скорости совпадают:
 , (3)
, (3)
и направление оси симметрии гироскопа остается неизменным. В этом можно убедиться, поворачивая подставку, на которой расположен карданов подвес - при произвольных поворотах подставки ось гироскопа сохраняет неизменное направление в пространстве. По этой же причине волчок, "запущенный" на листе картона и подброшенный вверх (рис.2), сохраняет направление своей оси во время полета, и, падая острием на картон, продолжает устойчиво вращаться, пока не израсходуется запас его кинетической энергии.

Рис.2
Свободный гироскоп, раскрученный вокруг оси симметрии, обладает весьма значительной устойчивостью. Из основного уравнения моментов следует, что изменение момента импульса

Если интервал времени  мал, то и
мал, то и  мало, то есть при кратковременных воздействиях даже очень больших сил движение гироскопа изменяется незначительно. Гироскоп как бы сопротивляется попыткам изменить его момент импульса и кажется "затвердевшим".
мало, то есть при кратковременных воздействиях даже очень больших сил движение гироскопа изменяется незначительно. Гироскоп как бы сопротивляется попыткам изменить его момент импульса и кажется "затвердевшим".
Возьмем гироскоп конусообразной формы, опирающийся на стержень подставки в своем центре масс О (рис. 3). Если тело гироскопа не вращается, то оно находится в состоянии безразличного равновесия, и малейший толчок сдвигает его с места. Если же это тело привести в быстрое вращение вокруг своей оси, то даже сильные удары деревянным молотком не смогут сколько-нибудь значительно изменить направление оси гироскопа в пространстве. Устойчивость свободного гироскопа используется в различных технических устройствах, например, в автопилоте.

Рис.3
2. Если свободный гироскоп раскручен так, что вектор мгновенной угловой скорости и ось симметрии гироскопа не совпадают (как правило, это несовпадение при быстром вращении бывает незначительным), то наблюдается движение, описанное как "свободная регулярная прецессия". Применительно же к гироскопу его называют нутацией. При этом ось симметрии гироскопа, векторы L и  лежат в одной плоскости, которая вращается вокруг направления L=const с угловой скоростью, равной
лежат в одной плоскости, которая вращается вокруг направления L=const с угловой скоростью, равной  где
где  - момент инерции гироскопа относительно главной центральной оси, перпендикулярной оси симметрии. Эта угловая скорость (назовем ее скоростью нутации) при быстром собственном вращении гироскопа оказывается достаточно большой, и нутация воспринимается глазом как мелкое дрожание оси симметрии гироскопа.
- момент инерции гироскопа относительно главной центральной оси, перпендикулярной оси симметрии. Эта угловая скорость (назовем ее скоростью нутации) при быстром собственном вращении гироскопа оказывается достаточно большой, и нутация воспринимается глазом как мелкое дрожание оси симметрии гироскопа.
Нутационное движение легко продемонстрировать с помощью гироскопа, показанного на рис. 3 - оно возникает при ударах молотком по стержню вращающегося вокруг своей оси гироскопа. При этом чем сильнее раскручен гироскоп, тем больше его момент импульса L - тем больше скорость нутации и тем "мельче" дрожания оси фигуры. Этот опыт демонстрирует еще одну характерную особенность нутации - с течением времени она постепенно уменьшается и исчезает. Это - следствие неизбежного трения в опоре гироскопа.
Наша Земля - своего рода гироскоп, и ей тоже свойственно нутационное движение. Это связано с тем, что Земля несколько приплюснута с полюсов, в силу чего моменты инерции относительно оси симметрии и относительно оси, лежащей в экваториальной плоскости  различаются. При этом
различаются. При этом  , а
, а  . В системе отсчета, связанной с Землей, ось вращения движется по поверхности конуса вокруг оси симметрии Земли с угловой скоростью w0, то есть она совершает один оборот примерно за 300 дней. На самом деле в силу, как предполагается, неабсолютной жесткости Земли, это время оказывается больше - оно составляет около 440 суток. При этом расстояние точки земной поверхности, через которую проходит ось вращении, от точки, через которую проходит ось симметрии (Северный полюс), равно всего нескольким метрам. Нутационное движение Земли не затухает - по-видимому, его поддерживают сезонные изменения, происходящие на поверхности
. В системе отсчета, связанной с Землей, ось вращения движется по поверхности конуса вокруг оси симметрии Земли с угловой скоростью w0, то есть она совершает один оборот примерно за 300 дней. На самом деле в силу, как предполагается, неабсолютной жесткости Земли, это время оказывается больше - оно составляет около 440 суток. При этом расстояние точки земной поверхности, через которую проходит ось вращении, от точки, через которую проходит ось симметрии (Северный полюс), равно всего нескольким метрам. Нутационное движение Земли не затухает - по-видимому, его поддерживают сезонные изменения, происходящие на поверхности
2.7.1.1
|
|
|

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!