Нелинейные системы
Различают статические и динамические нелинейности. Первые описываются нелинейными алгебраическими уравнениями, а вторые представляются в виде нелинейных дифференциальных уравнений.
Общий метод составления уравнений для нелинейных систем состоит в следующем. Сначала по правилам §3.1 производится линеаризация уравнений всех звеньев системы, для которых это допустимо, кроме существенно нелинейных звеньев (чате всего одпого-двух). Затем составляются уравнения этих последних звеньев со всеми допустимыми упрощениями их характеристик.
В результате получается система линейных уравнений, к которым добавляется одно-два (иногда более) нелинейных. В соответствии с этим обобщенную структурную схему любой нелинейной системы в случае одного нелинейного звена можно представить в виде рис. 16.1, а, где линейная часть может иметь структуру любой сложности (с обратными связями и т. п„ как, например, на рис. 16.1, били в). В случае двух нелинейных
звеньев могут быть разные комбинации, в зависимости от того, в какие цепи системы они холят
Непрерывные
Если в ходе работы данной системы структуры связи не меняются, то такая система имеет название непрерывной. Соответственно сигналы на выходе ее тоже будут непрерывными и представлять собой функцию входящего воздействия и времени. Между выходными и входными элементами такой системы будет существовать связь, которая не будет прерываться во времени.
Дискретные системы автоматического управления можно классифицировать по различным признакам. В зависимости от характера задающего воздействия дискретные САУ можно подразделить на: системы стабилизации, предназначенные для поддержания заданного значения выходной координаты, определяемого постоянным задающим воздействием; системы программного управления, воспроизводящие задающее воздействие, закон изменения которого во времени заранее известен, и следящие системы – их задающее воздействие представляет собой неизвестную функцию времени.
По принципу управления различают разомкнутые, замкнутые и комбинированные дискретные системы управления, когда для целей управления наряду со значениями выходных координат используют измеренные значения задающих и возмущающих воздействий.
Дискретные системы автоматического управления различают по виду квантования и модуляции сигналов. Различают три способа квантования сигналов: по времени; по уровню; смешанное по времени и уровню.
Квантование по времени осуществляется в импульсных системах, где из непрерывного сигнала выделяются значения дискретных сигналов через равные промежутки времени  (рис. 2.1).
(рис. 2.1).
Квантование по уровню используется в релейных системах, где из непрерывного сигнала выделяются значения дискретных сигналов при достижении величины непрерывного сигнала равноотстоящих уровней  (рис. 2.2).
(рис. 2.2).
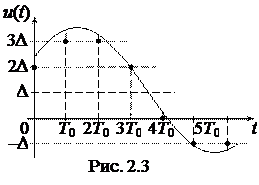 Смешанное квантование происходит в цифровых автоматических системах (ЦАС), где преобразование непрерывного сигнала в дискретные проводится через равные промежутки времени , со значениями достигнутых равноотстоящих уровней (рис. 2.3, с отсечением дробной части).
Смешанное квантование происходит в цифровых автоматических системах (ЦАС), где преобразование непрерывного сигнала в дискретные проводится через равные промежутки времени , со значениями достигнутых равноотстоящих уровней (рис. 2.3, с отсечением дробной части).
По дискретным значениям исходного
или преобразованного сигнала формируются
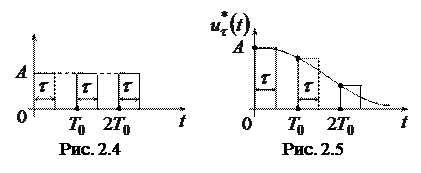
импульсы определенной формы: прямоугольные, трапецеидальные, треугольные и т.д. В системах автоматического управления обычно используются прямоугольные импульсы, которые можно охарактеризовать следующими параметрами (рис.2.4):  – амплитуда;
– амплитуда;  – ширина импульса; – период повторения импульсов,
– ширина импульса; – период повторения импульсов,  – скважность.
– скважность.
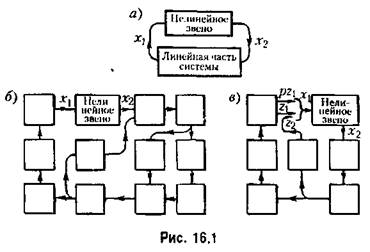
В зависимости от того, какой из параметров прямоугольного импульса подвергается изменению в функции от величины непрерывного сигнала в дискретный момент времени, различают три вида импульсной модуляции: амплитудно-импульсную модуляцию (АИМ) при  var,
var, 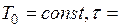 const (рис. 2.5); широтно-импульсную модуляцию (ШИМ) при const,
const (рис. 2.5); широтно-импульсную модуляцию (ШИМ) при const,  var (рис. 2.6); время - импульсную модуляцию (ВИМ) при const, = var, = const: за счет изменения фазы – фазоимпульсную модуляцию (ФИМ); за счет изменения частоты
var (рис. 2.6); время - импульсную модуляцию (ВИМ) при const, = var, = const: за счет изменения фазы – фазоимпульсную модуляцию (ФИМ); за счет изменения частоты  – частотно-импульсную модуляцию (ЧИМ).
– частотно-импульсную модуляцию (ЧИМ).
В отличие от рассмотренных выше типов импульсных систем с мгновенным временем съема сигнала (модуляцией I рода) существуют системы с конечным временем съема сигнала (модуляцией II рода). Такой вид амплитудно-импульсной модуляции может быть получен при использовании периодически замыкаемого ключа, представленного на рис.2.7. Здесь на выходе ключа через
равные промежутки времени вырабатываются импульсы, амплитуда которых изменяется в зависимости от величины входного непрерывного сигнала  . Импульсные системы с амплитудно-импульсной модуляцией, представленной на рис.2.5 и рис.2.7, называются импульсными системами I-го и II-го рода соответственно.
. Импульсные системы с амплитудно-импульсной модуляцией, представленной на рис.2.5 и рис.2.7, называются импульсными системами I-го и II-го рода соответственно.
Достоинством дискретных систем является: возможность управления
большими мощностями с высокой точностью; разделение во времени информационных сигналов при многоканальной передаче; возможность получения высокой точности и помехозащищенности за счет цифрового представления непрерывных сигналов; построение сложных законов управления при использовании ЦВМ в контуре управления. К недостаткам относится потеря информации о непрерывном сигнале в результате его квантования по времени или уровню, которая отражается на динамике системы.
В качестве примера на рис. 2.8 приведена функциональная схема одномерной ЦАС, которая включает в себя непрерывную часть системы, состоящую из объекта управления (ОУ), датчиков (Д), приводов исполнительных органов (ИО), и дискретную часть, реализованную в управляющей ЦВМ (УЦВМ). УЦВМ содержит преобразователи непрерывной (аналоговой) величины в код (АЦП), который поступает в ЦВМ для выработки управляющего сигнала. Цифровой сигнал с выхода ЦВМ проходит через преобразователь кода в непрерывную величину (ЦАП), который затем в виде импульсов поступает на непрерывную часть. Дискретность ввода и вывода информации в УЦВМ иллюстрируют импульсные элементы (ИЭ), работающие с периодом дискретности .
с сосредоточенными – с распределенными параметрами