Установившийся режим синхронной машины всегда сопровождается малым изменением напряжения сети, напряжения возбуждения или внешнего момента. Эти изменения обуславливают возмущение установившегося режима, в результате которого возникает переходный процесс, оканчивающийся либо новым установившимся режимом ( ), либо угол q непрерывно изменяется, и нормальная работа синхронной машины становится невозможной.
), либо угол q непрерывно изменяется, и нормальная работа синхронной машины становится невозможной.
Для характеристики установившегося режима синхронной машины в условиях малых возмущений вводят понятие о статической устойчивости. Говорят, что режим синхронной машины статически устойчив, если сколь угодно малое возмущение оканчивается переходом к новому установившемуся режиму. В противном случае говорят, что режим статически неустойчив.
Рассмотрим генераторный режим синхронной машины. Пусть генератор развивает мощность  . Принципиально возможны два режима работы генератора с такой мощностью, соответствующие точкам 1 и 2 на угловой характеристике (рис. 5.40).
. Принципиально возможны два режима работы генератора с такой мощностью, соответствующие точкам 1 и 2 на угловой характеристике (рис. 5.40).
Покажем, что режим в точке 1 устойчив, а в точке 2 - неустойчив. Движение ротора синхронной машины описывается дифференциальными уравнениями
 (5.16)
(5.16)
где  - угловая скорость вращения ротора;
- угловая скорость вращения ротора;  - синхронная угловая скорость.
- синхронная угловая скорость.
В установившемся режиме электромагнитный момент генератора  уравновешивает внешний момент
уравновешивает внешний момент  , поэтому угловая скорость вращения ротора
, поэтому угловая скорость вращения ротора  и угол нагрузки
и угол нагрузки  .
.
Для анализа характера движения ротора при малом возмущении со стороны сети выполним линеаризацию угловой характеристики:
 .
.
Аналогичное выражение получаем и для электромагнитного момента:
 .
.
Тогда уравнение движения ротора можно представить в малых приращениях:
 (5.17)
(5.17)
где  ;
;  .
.
Решение этого уравнения имеет вид
 , (5.18)
, (5.18)
где  и
и  - корни характеристического уравнения
- корни характеристического уравнения
 ,
,
определяемые выражением
 .
.
Данное выражение показывает, что при  (режим в точке 1) оба корня являются комплексными, поэтому характер переходного процесса будет колебательным. Колебания быстро затухают благодаря действию успокоительной обмотки (не учитываемой при данном анализе). После затухания колебаний машина вновь выходит на установившийся режим.
(режим в точке 1) оба корня являются комплексными, поэтому характер переходного процесса будет колебательным. Колебания быстро затухают благодаря действию успокоительной обмотки (не учитываемой при данном анализе). После затухания колебаний машина вновь выходит на установившийся режим.
При  (режим в точке 2) оба корня являются вещественными, причем один из них положительный. В этом случае уравнение (5.18) не имеет устойчивого решения (
(режим в точке 2) оба корня являются вещественными, причем один из них положительный. В этом случае уравнение (5.18) не имеет устойчивого решения ( при
при  ). Поэтому угол q будет непрерывно изменяться до тех пор, пока режим не установится в точке 1, где
). Поэтому угол q будет непрерывно изменяться до тех пор, пока режим не установится в точке 1, где  . Переход из точки 2 в точку 1 будет происходить как показано стрелками на рис. 5.40 либо в результате уменьшения угла q, либо после одного проворота ротора относительно поля статора в результате увеличения угла q.
. Переход из точки 2 в точку 1 будет происходить как показано стрелками на рис. 5.40 либо в результате уменьшения угла q, либо после одного проворота ротора относительно поля статора в результате увеличения угла q.
Производная  называется удельным синхронизирующим моментом. Соответствующая ему удельная синхронизирующая мощность
называется удельным синхронизирующим моментом. Соответствующая ему удельная синхронизирующая мощность  определяется по формуле
определяется по формуле
 .
.
Зависимость синхронизирующей мощности  от угла q показана на рис. 5.40. Восходящая ветвь угловой характеристики, при которой
от угла q показана на рис. 5.40. Восходящая ветвь угловой характеристики, при которой  , соответствует устойчивому режиму, а нисходящая - неустойчивому. Наиболее устойчивым является режим холостого хода, а предельным по условию статической устойчивости является режим при
, соответствует устойчивому режиму, а нисходящая - неустойчивому. Наиболее устойчивым является режим холостого хода, а предельным по условию статической устойчивости является режим при  .
.
U-образные характеристики
Для анализа свойств синхронной машины, работающей параллельно с сетью, наряду с угловой характеристикой  важное значение имеют U -образные характеристики, представляющие зависимость тока якоря в функции тока возбуждения
важное значение имеют U -образные характеристики, представляющие зависимость тока якоря в функции тока возбуждения  при постоянных активной мощности, напряжении и частоте сети (
при постоянных активной мощности, напряжении и частоте сети ( ,
,  ,
,  ). U-образные характеристики могут быть построены с помощью векторных диаграмм, учитывающих насыщение стали. На рис. 5.41 приведены векторные диаграммы неявнополюсного синхронного генератора (
). U-образные характеристики могут быть построены с помощью векторных диаграмм, учитывающих насыщение стали. На рис. 5.41 приведены векторные диаграммы неявнополюсного синхронного генератора ( ).
).
В соответствии с условием  активная составляющая тока якоря
активная составляющая тока якоря
 ,
,
поэтому концы вектора тока  будут лежать на линии I, перпендикулярной вектору напряжения
будут лежать на линии I, перпендикулярной вектору напряжения  , а концы вектора результирующей ЭДС
, а концы вектора результирующей ЭДС

будут лежать на линии II, параллельной вектору напряжения. Цифрами на этих линиях отмечены расчетные точки U-образной характеристики для мощности  , соответствующей току
, соответствующей току 
Модуль ЭДС  определяет по характеристике холостого хода суммарную МДС
определяет по характеристике холостого хода суммарную МДС  . Вектор
. Вектор  опережает ЭДС
опережает ЭДС  на 90°. Вычитая из него вектор МДС реакции поля
на 90°. Вычитая из него вектор МДС реакции поля  , находим вектор МДС обмотки возбуждения
, находим вектор МДС обмотки возбуждения

и соответствующий ему ток возбуждения
 .
.
Геометрическим местом концов вектора МДС  является линия IV, на которой цифрами указаны расчетные точки, соответствующие заданным токам якоря на линии I.
является линия IV, на которой цифрами указаны расчетные точки, соответствующие заданным токам якоря на линии I.
Полученная таким образом зависимость  представлена на рис. 5.42 с отмеченными на ней расчетными точками.
представлена на рис. 5.42 с отмеченными на ней расчетными точками.
Аналогично производится построение U-образных характеристик для других значений активной мощности. Минимумы U-образных характеристик соответствуют активным составляющим тока якоря, поэтому линия, соединяющая минимумы, представляет собой регулировочную характеристику генератора при  . Точки U-образной характеристики, лежащие правее ее минимума, соответствуют режиму перевозбуждения, а левее - режиму недовозбуждения.
. Точки U-образной характеристики, лежащие правее ее минимума, соответствуют режиму перевозбуждения, а левее - режиму недовозбуждения.
В режиме перевозбуждения ток якоря  отстает от напряжения
отстает от напряжения  , машина отдает в сеть реактивную мощность (
, машина отдает в сеть реактивную мощность ( ). В режиме недовозбуждения ток
). В режиме недовозбуждения ток  опережает вектор напряжения
опережает вектор напряжения  , синхронная машина потребляет из сети реактивную мощность (
, синхронная машина потребляет из сети реактивную мощность ( ).
).
Минимальное значение тока возбуждения ограничивается пределом статической устойчивости генератора  , равным мощности
, равным мощности  , при которой построена U-образная характеристика. Максимальная величина тока определяется допустимым перегревом обмотки возбуждения.
, при которой построена U-образная характеристика. Максимальная величина тока определяется допустимым перегревом обмотки возбуждения.
Синхронные двигатели
Синхронная машина, как любая электрическая машина, обратима, т.е. может работать как в двигательном, так и в генераторном режимах. Однако особенности работы машины в том или ином режиме предъявляют различные требования к ее конструктивному исполнению. Наиболее существенным отличием условий работы синхронного двигателя является процесс включения его в сеть, называемый пуском.
Собственный пусковой момент синхронного двигателя равен нулю, так как вследствие инерции ротора поток возбуждения  не может сразу достичь синхронной частоты вращения потока статора
не может сразу достичь синхронной частоты вращения потока статора  . Поэтому после включения возбуждения двигателя в сеть при
. Поэтому после включения возбуждения двигателя в сеть при  поля
поля  и
и  перемещаются относительно друг друга с большой скоростью, и среднее взаимодействие этих полей равно нулю.
перемещаются относительно друг друга с большой скоростью, и среднее взаимодействие этих полей равно нулю.
Пуск синхронного двигателя можно осуществить с помощью преобразователя частоты, который плавно повышает частоту вращения поля якоря  от нуля до номинального значения по мере разгона двигателя. Такой способ пуска называется частотным. Возможен также пуск синхронного двигателя при помощи дополнительного асинхронного двигателя, осуществляющего предварительный разгон недовозбужденного синхронного двигателя до подсинхронной частоты вращения. Затем производится включение синхронного двигателя в сеть и его синхронизация по методу грубой синхронизации подобно тому, как это делается для синхронных генераторов.
от нуля до номинального значения по мере разгона двигателя. Такой способ пуска называется частотным. Возможен также пуск синхронного двигателя при помощи дополнительного асинхронного двигателя, осуществляющего предварительный разгон недовозбужденного синхронного двигателя до подсинхронной частоты вращения. Затем производится включение синхронного двигателя в сеть и его синхронизация по методу грубой синхронизации подобно тому, как это делается для синхронных генераторов.
| 
|
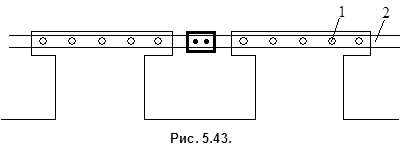
Однако наиболее распространенным является асинхронный пуск синхронного двигателя. С этой целью на роторе в специальных пазах полюсных наконечников явнополюсных синхронных двигателей размещают короткозамкнутую обмотку (рис. 5.43) в виде латунных, медных или бронзовых стержней 1, соединенных по торцам короткозамыкающими кольцами 2. Эта обмотка называется пусковой. При использовании массивных плюсов, а также в случае неявнополюсных синхронных двигателей с ротором в виде массивного стального цилиндра роль пусковой обмотки выполняет внешняя поверхность полюсов или цилиндра ротора.
Схема асинхронного пуска представлена на рис. 5.44. В соответствии с этой схемой процесс пуска выполняется в два этапа. На первом этапе после включения обмотки статора в сеть ротор двигателя разгоняется под действием асинхронного момента до подсинхронной частоты вращения. Скольжение ротора
 .
.
Обмотка возбуждения в течение первого этапа пуска замыкается на активное сопротивление  . Оставлять обмотку возбуждения разомкнутой нельзя, так как вращающееся поле статора наводит в ней в начальный период пуска значительную ЭДС, способную «пробить» изоляцию обмотки возбуждения и опасную для эксплуатационного персонала.
. Оставлять обмотку возбуждения разомкнутой нельзя, так как вращающееся поле статора наводит в ней в начальный период пуска значительную ЭДС, способную «пробить» изоляцию обмотки возбуждения и опасную для эксплуатационного персонала.
| 
|
Замыкать обмотку возбуждения накоротко также нецелесообразно, так как при этом возрастают провалы в кривой асинхронного момента  (рис.5.45). Обмотка возбуждения является однофазной обмоткой. Индуцированный в ней ток создает пульсирующее магнитное поле. Прямо вращающаяся составляющая этого поля создает момент
(рис.5.45). Обмотка возбуждения является однофазной обмоткой. Индуцированный в ней ток создает пульсирующее магнитное поле. Прямо вращающаяся составляющая этого поля создает момент  , а обратно вращающаяся составляющая - момент
, а обратно вращающаяся составляющая - момент  (см. п.4.13.2). При суммировании этих моментов с моментом пусковой обмотки
(см. п.4.13.2). При суммировании этих моментов с моментом пусковой обмотки  в кривой результирующего момента
в кривой результирующего момента  появляются провалы в зоне малых скольжений и в области скольжения
появляются провалы в зоне малых скольжений и в области скольжения  , которые могут затруднить пуск двигателя. Введение в цепь обмотки возбуждения дополнительного сопротивления
, которые могут затруднить пуск двигателя. Введение в цепь обмотки возбуждения дополнительного сопротивления  позволяет уменьшить величину этих провалов. Для оценки пусковых свойств синхронного двигателя используются три показателя:
позволяет уменьшить величину этих провалов. Для оценки пусковых свойств синхронного двигателя используются три показателя:
кратность пускового момента  ;
;
кратность максимального момента  ;
;
кратность входного момента  .
.
Входной момент определяется при скольжении  , примерно соответствующем верхнему уровню скольжения, при котором двигатель может войти в синхронизм после подачи возбуждения. Момент сопротивления на валу двигателя
, примерно соответствующем верхнему уровню скольжения, при котором двигатель может войти в синхронизм после подачи возбуждения. Момент сопротивления на валу двигателя  должен быть меньше развиваемого двигателем асинхронного момента
должен быть меньше развиваемого двигателем асинхронного момента  (рис. 5.45). Разность моментов
(рис. 5.45). Разность моментов  и
и  определяет динамический момент
определяет динамический момент
 .
.
Чем больше динамический момент, тем меньше время пуска
 .
.
Если динамический момент мал, то пуск затягивается. Это может привести к перегреву обмотки статора и пусковой обмотки из-за значительных токов, протекающих по этим обмоткам при асинхронном пуске. Пусковой ток статорной обмотки (при  ) в несколько раз превышает номинальный ток и обычно составляет
) в несколько раз превышает номинальный ток и обычно составляет
 .
.
Второй этап пуска начинается, когда ротор достигнет установившейся частоты вращения ( ), и обмотка возбуждения подключается к источнику постоянного тока (возбудителю). После включения возбуждения на ротор помимо асинхронного момента начинает действовать синхронный момент
), и обмотка возбуждения подключается к источнику постоянного тока (возбудителю). После включения возбуждения на ротор помимо асинхронного момента начинает действовать синхронный момент  , зависящий от тока возбуждения
, зависящий от тока возбуждения  и угла q,
и угла q,
 .
.
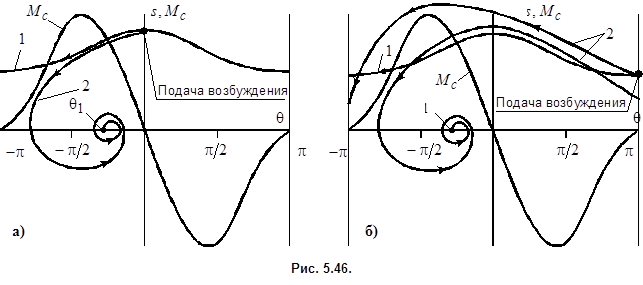
На рис. 5.46 представлены зависимости момента  и скольжения s для разных моментов включения возбуждения.
и скольжения s для разных моментов включения возбуждения.
При отсутствии возбуждения скольжение в установившемся асинхронном режиме изменяется по кривой 1. Ее нелинейный характер объясняется магнитной несимметрией ротора по осям d и q (для неявнополюсного двигателя скольжение постоянно и не зависит от положения ротора).
При подаче возбуждения в момент  (рис. 5.46, а) синхронный момент
(рис. 5.46, а) синхронный момент  положителен и, складываясь с асинхронным моментом
положителен и, складываясь с асинхронным моментом  , приводит к уменьшению скольжения (кривая 2). Ротор достигает синхронной частоты вращения и после нескольких качаний выходит на установившийся режим (
, приводит к уменьшению скольжения (кривая 2). Ротор достигает синхронной частоты вращения и после нескольких качаний выходит на установившийся режим ( ,
,  ).
).
При подаче возбуждения в момент  (рис. 5.46, б) возникающий синхронный момент будет действовать против направления вращения ротора. Поэтому скольжение ротора на интервале, когда момент
(рис. 5.46, б) возникающий синхронный момент будет действовать против направления вращения ротора. Поэтому скольжение ротора на интервале, когда момент  , возрастает (кривая 2), и условия для синхронизации на интервале положительного момента (
, возрастает (кривая 2), и условия для синхронизации на интервале положительного момента ( ) ухудшаются. Ротор достигает синхронной частоты вращения после одного или нескольких проворотов, а при неблагоприятных условиях синхронизация двигателя может оказаться невозможной.
) ухудшаются. Ротор достигает синхронной частоты вращения после одного или нескольких проворотов, а при неблагоприятных условиях синхронизация двигателя может оказаться невозможной.
Рабочие свойства синхронных двигателей могут быть исследованы с помощью уравнений и векторных диаграмм, полученных для синхронных генераторов (см. п. 5.11 и 5.12). Основным режимом синхронных двигателей является режим при  . Этот режим описывается U-образными характеристиками (рис. 5.47), которые практически повторяют U-образные характеристики генератора. Отличается лишь U-образная характеристика в режиме холостого хода
. Этот режим описывается U-образными характеристиками (рис. 5.47), которые практически повторяют U-образные характеристики генератора. Отличается лишь U-образная характеристика в режиме холостого хода  , когда для своей работы двигатель потребляет из сети активный ток
, когда для своей работы двигатель потребляет из сети активный ток  .
.
Другим характерным режимом является работа двигателя при постоянном возбуждении ( ) и переменной нагрузке (
) и переменной нагрузке ( ). Характеристиками этого режима являются угловые (рис. 5.48) и рабочие характеристики (рис. 5.49).
). Характеристиками этого режима являются угловые (рис. 5.48) и рабочие характеристики (рис. 5.49).
Угловые характеристики построены без учета знака угла и мощности для трех значений тока возбуждения. Они показывают, что синхронные двигатели допускают регулирование максимального момента. Это имеет очень важное значение в аварийных режимах для сохранения устойчивости параллельной работы двигателя с сетью.
Рабочие характеристики (рис. 5.49) построены при токе возбуждения  (рис. 5.47). С ростом нагрузки
(рис. 5.47). С ростом нагрузки  падает, двигатель переходит в режим потребления реактивной мощности (
падает, двигатель переходит в режим потребления реактивной мощности ( ). При автоматическом регулировании тока возбуждения можно обеспечить работу двигателя с любым заданным законом изменения коэффициента мощности.
). При автоматическом регулировании тока возбуждения можно обеспечить работу двигателя с любым заданным законом изменения коэффициента мощности.
Синхронные двигатели обычно проектируются для работы в режиме перевозбуждения ( ) с коэффициентом мощности
) с коэффициентом мощности  . Это позволяет уменьшить реактивную мощность синхронных генераторов на электростанциях и тем самым уменьшить потери в линиях электропередачи. Однако в сравнении с асинхронными двигателями синхронные двигатели являются более дорогими, главным образом, из-за затрат, связанных с изготовлением системы возбуждения. Синхронные двигатели также сложнее асинхронных в конструктивном отношении, нуждаются в квалифицированном обслуживании и менее надежны в эксплуатации.
. Это позволяет уменьшить реактивную мощность синхронных генераторов на электростанциях и тем самым уменьшить потери в линиях электропередачи. Однако в сравнении с асинхронными двигателями синхронные двигатели являются более дорогими, главным образом, из-за затрат, связанных с изготовлением системы возбуждения. Синхронные двигатели также сложнее асинхронных в конструктивном отношении, нуждаются в квалифицированном обслуживании и менее надежны в эксплуатации.
Выбор того или иного типа двигателя осуществляется на основе технико-экономических расчетов. При мощности 100-200 кВт синхронные двигатели часто оказываются выгоднее асинхронных.
Синхронные компенсаторы
Синхронные компенсаторы являются генераторами и потребителями реактивной мощности. Они включаются в систему вблизи мощных узлов нагрузки (рис. 5.50).
Синхронные компенсаторы позволяют разгружать линии электропередачи от реактивных токов, повышая их использование и поддерживая заданный уровень напряжения в системе. Последнее имеет важное значение не только в отношении качества электроэнергии у потребителей, но и с точки зрения повышения устойчивости работы энергосистемы.
Затраты, связанные с установкой и эксплуатацией синхронных компенсаторов окупаются, если их мощность составляет  полной мощности линии электропередачи.
полной мощности линии электропередачи.
Конструктивно синхронные компенсаторы выполняются так же, как синхронные двигатели. Отличие состоит лишь в том, что они не имеют выходного конца вала. Мощность синхронных компенсаторов  при напряжении
при напряжении  . Частота вращения
. Частота вращения  , исполнение - горизонтальное с явнополюсным ротором.
, исполнение - горизонтальное с явнополюсным ротором.
Включение синхронных компенсаторов в сеть производится методом асинхронного пуска, подобно синхронным двигателям. Рабочий процесс синхронного компенсатора описывается U-образной характеристикой  (рис. 5.51). Эта характеристика ничем не отличается от соответствующей характеристики синхронного двигателя при
(рис. 5.51). Эта характеристика ничем не отличается от соответствующей характеристики синхронного двигателя при  .
.
Важным свойством синхронного компенсатора является его способность к стабилизации напряжения сети. При уменьшении напряжения сети (рис. 5.52, а) реактивная мощность, отдаваемая компенсатором в сеть, увеличивается, а при увеличении напряжения (рис. 5.52, б) компенсатор переходит в режим потребления реактивной мощности. Благодаря такой реакции компенсатора происходит стабилизация реактивного тока в линии электропередачи и, следовательно, стабилизация напряжения.
При автоматическом регулировании возбуждения стабилизирующие свойства синхронного компенсатора улучшаются.
Наиболее тяжелым в тепловом отношении режимом работы компенсатора является режим перевозбуждения. В этом режиме при номинальном (допустимом по условию нагрева обмотки возбуждения) токе возбуждения ток якоря достигает наибольшего значения,
 .
.
По мере уменьшения тока возбуждения ток якоря сначала снижается почти до нуля при  (рис. 5.51), а затем вновь возрастает, принимая при
(рис. 5.51), а затем вновь возрастает, принимая при  значение
значение
 .
.
Отношение токов
 .
.
Следовательно, синхронные компенсаторы могут потреблять реактивную мощность  в
в  раза меньшую, чем выдаваемуя в сеть мощность
раза меньшую, чем выдаваемуя в сеть мощность  в режиме перевозбуждения.
в режиме перевозбуждения.
Для увеличения мощности  необходимо выполнять компенсаторы с малым
необходимо выполнять компенсаторы с малым  , что связано с увеличением стоимости машины. Другой путь увеличения мощности
, что связано с увеличением стоимости машины. Другой путь увеличения мощности  - это использование режимов отрицательного возбуждения (пунктирная линия на рис. 5.51). Однако при реализации этого режима возникают трудности обеспечения устойчивой работы синхронного компенсатора.
- это использование режимов отрицательного возбуждения (пунктирная линия на рис. 5.51). Однако при реализации этого режима возникают трудности обеспечения устойчивой работы синхронного компенсатора.
При отрицательном возбуждении, согласно уравнению угловой характеристики
 ,
,
знак первого слагаемого становится положительным ( ,
,  ), а знак второго не меняется, поэтому величина максимальной мощности
), а знак второго не меняется, поэтому величина максимальной мощности  , а следовательно, и вращающего момента
, а следовательно, и вращающего момента  существенно снижаются (рис. 5.53). Предельным по условию устойчивости является режим, при котором максимальная мощность
существенно снижаются (рис. 5.53). Предельным по условию устойчивости является режим, при котором максимальная мощность  снижается до величины механических потерь в компенсаторе
снижается до величины механических потерь в компенсаторе  .
.
Из рис. 5.53 видно, что допустимая величина отрицательного тока возбуждения будет тем больше, чем больше реактивный момент, зависящий от отношения  . Применение отрицательного возбуждения позволяет увеличить потребляемую реактивную мощность на 40-50% по сравнению с режимом при
. Применение отрицательного возбуждения позволяет увеличить потребляемую реактивную мощность на 40-50% по сравнению с режимом при  .
.