

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
Топ:
Оснащения врачебно-сестринской бригады.
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Интересное:
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Дифференциальные уравнения, например в виде (5) допускают постановку двух типов задач динамики точки:
1) Прямая задача динамики точки
Определение равнодействующей сил, приложенных к точке по заданному закону ее движения. Пуст закон задан в декартовых координатах.
x(t)
y(t) R(t) -?
z(t)
Решение этой задачи связано с дифференцированием закона движения. Проекции и модуль равнодействующей сил находим по формулам:
ìRx=mx**
íRy=my** (7)
îRz=mz**
R2= Rx²+Ry²+Rz,
№15 Вторая задача динамики. Примеры.
Вторая основная задача динамики точки обратна первой, и заключается в том, чтобы по заданным силам, действующим на точку, определить ее движение.
Пусть на материальную точку действует некоторая система сил и требуется определить движение точки под действием этих сил.
Уравнение второго основного закона динамики для материальной точки массой m запишется в виде

где a – ускорение точки;
Fi – силы, действующие на точку, включая реакции связей.
Спроектировав уравнение (4.1) на декартовы оси координат, получим систему из трех уравнений
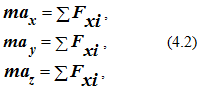
где ax, ay, az – проекции ускорения точки на декартовы оси координат;
Fx , Fy , Fz – проекция i -й силы на соответствующую ось.
Учитывая, что

получаем систему дифференциальных уравнений первого порядка относительно проекций скорости точки или второго порядка относительно координат точки.
Спроектировав уравнение (4.1) на естественные оси координат, получим следующую систему уравнений:
maτ = ΣFτi
man = ΣFni
0 = ΣFbi
Учитывая, что
где V – алгебраическое значение скорости точки, получим
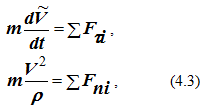
0 = ΣFbi
В зависимости от того, что известно о движении точки, дифференциальные уравнения записывают или в декартовых, или в естественных координатах.
|
|
Каждое дифференциальное уравнение дает целый класс решений, отличающихся друг от друга на некоторую постоянную величину.
Чтобы получить решение конкретной задачи, должны быть заданы так называемые начальные условия, которые позволяют определить постоянные интегрирования.
№17 Динамика относительного движения. Силы инерции. Примеры
 Законы Галилея-Ньютона были установлены для инерциальной или абсолютной систем отсчета. Наряду с инерциальной, в теоретической механике рассматриваются также различные подвижные системы отсчета, движущиеся произвольным образом по отношению к инерциальной.
Законы Галилея-Ньютона были установлены для инерциальной или абсолютной систем отсчета. Наряду с инерциальной, в теоретической механике рассматриваются также различные подвижные системы отсчета, движущиеся произвольным образом по отношению к инерциальной.
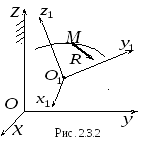
Составим уравнения динамики относительного движения материальной точки  по отношению к некоторой системе отсчета
по отношению к некоторой системе отсчета  , движущейся произвольным образом по отношению к абсолютной (инерциальной) системе отсчета
, движущейся произвольным образом по отношению к абсолютной (инерциальной) системе отсчета  (рис. 2.3.2).
(рис. 2.3.2).
Согласно известной из кинематики теореме Кориолиса (см. тему 1.3), абсолютное ускорение точки равно геометрической сумме трех ускорений
 , (2.3.13)
, (2.3.13)
где  - переносное ускорение, равное ускорению той точки
- переносное ускорение, равное ускорению той точки  системы отсчета
системы отсчета  (или переносящей среды), с которой в данный момент времени совпадает движущаяся точка
(или переносящей среды), с которой в данный момент времени совпадает движущаяся точка  ;
;  - относительное ускорение, то есть ускорение точки
- относительное ускорение, то есть ускорение точки  в ее движении по отношению к подвижной системе отсчета;
в ее движении по отношению к подвижной системе отсчета;  - ускорение Кориолиса. Уравнение (2.3.1) с учетом (2.3.13) принимает вид
- ускорение Кориолиса. Уравнение (2.3.1) с учетом (2.3.13) принимает вид
 , (2.3.14)
, (2.3.14)
описывающий движение точки по отношению к подвижной системе отсчета  . Это уравнение отличается от уравнения (2.3.1) наличием в правой части слагаемых
. Это уравнение отличается от уравнения (2.3.1) наличием в правой части слагаемых  и
и  , имеющих размерность силы и называемых переносной и кориолисовой силами инерции соответственно. В случае свободной точки эти “силы” возникают не вследствие взаимодействия с другими телами, а благодаря движению подвижной системы отсчета, причем при переходе от одной подвижной системы к другой они могут существенно изменяться. Эти “силы” существуют для наблюдателя, связанного с движущейся с ускорением системы отсчета
, имеющих размерность силы и называемых переносной и кориолисовой силами инерции соответственно. В случае свободной точки эти “силы” возникают не вследствие взаимодействия с другими телами, а благодаря движению подвижной системы отсчета, причем при переходе от одной подвижной системы к другой они могут существенно изменяться. Эти “силы” существуют для наблюдателя, связанного с движущейся с ускорением системы отсчета  .
.
|
|
Ньютон указал, что абсолютное и относительное движение отличаются друг от друга признаками происхождения сил, которые надо приложить к телам, чтобы произвести эти движения. Абсолютное движение не может ни произойти, ни измениться иначе, как от действия сил, приложенных непосредственно к самому телу, тогда как относительное движение может быть произведено и изменено без приложения сил к этому телу; достаточно, чтобы силы были приложены к тем телам, по отношению к которым это движение определяется. Если подвижная система отсчета  движется относительно абсолютной системы
движется относительно абсолютной системы  поступательно, прямолинейно и равномерно, то
поступательно, прямолинейно и равномерно, то  и
и  . При этом уравнение (2.3.14) имеет точно такой же вид, как и уравнение (2.3.1). Физически это означает, что законы механики в бесчисленном множестве систем отсчета, движущихся поступательно, прямолинейно и равномерно относительно инерциальной системы, формулируются точно так же, как и в абсолютной системе при условии универсальности времени. Причем все такие системы отсчета равноправны и эквивалентны между собой с точки зрения механики.
. При этом уравнение (2.3.14) имеет точно такой же вид, как и уравнение (2.3.1). Физически это означает, что законы механики в бесчисленном множестве систем отсчета, движущихся поступательно, прямолинейно и равномерно относительно инерциальной системы, формулируются точно так же, как и в абсолютной системе при условии универсальности времени. Причем все такие системы отсчета равноправны и эквивалентны между собой с точки зрения механики.
В этом и заключается содержание принципа относительности механики, сформулированного Галилеем.
Подвижные системы отсчета, движение которых отличается от поступательного, прямолинейного и равномерного относительно инерциальной системы отсчета называются неинерциальными. В этих системах уравнение движения (2.3.1) должно быть заменено уравнением относительного движения (2.3.14).
№18. Теорема о движении центра масс. Примеры.
Поступательно движущееся тело можно всегда рассматривать как материальную точку с массой, равной массе тела. В остальных случаях тело можно рассматривать как материальную точку лишь тогда, когда практически для определения положения тела достаточно знать положение его центра масс и допустимо по условиям задачи не принимать во внимание вращательную часть движения тела;
Теорема позволяет исключать из рассмотрения все наперед неизвестные внутренние силы. В этом ее практическая ценность.
№19Теорема об изменении количества движения для точки и системы. Примеры.
|
|
|

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!