6.1. Фазовые дрожания компонентных сигналов в трактах SDH,
вызываемые асинхронным отображением
Компонентные сигналы в тракты SDH вводятся с использованием процедуры отображения (mapping). Карты, в соответствии с которыми заполняются виртуальные контейнеры, зависят от того синхронным или асинхронным является компонентный поток по отношению к сигналам в мультиплексоре SDH. Асинхронное отображение выполняется с использованием процедуры цифровой коррекции со вставками.
В цифровых сетях типовых каналов и трактов при асинхронном способе передачи цифровых сигналов используются методы кодирования амплитуды, кодирования фронтов и кодирования скорости компонентных цифровых сигналов. Кодирование скорости или в дальнейшем цифровая коррекция зависит от вида компонентного сигнала. Если компонентный сигнал представляет собой сплошной поток данных, то выполняется цифровая коррекция со вставками. Если же компонентный поток характеризуется циклом, то выполняется цифровая коррекция по прямой линии.
Интерфейсы цифровых трактов стандартизованы скоростями цифровых сигналов и допустимыми отклонениями этих скоростей от номинального значения.
Для выполнения цифровой коррекции со вставками в качестве основного блока аппаратуры используется эластичная память. Это устройство содержит фиксированное количество ячеек, но количество битов или байтов информационного сигнала, которые находятся в этих ячейках, может быть в течение времени различным и изменяться в пределах величины размеров памяти, поэтому и устройство получило название «эластичная память».
На рис. 6.1 приведена схема устройства цифровой коррекции. Компонентный поток записывается в ячейки памяти с фактической частотой, которая выделяется из информационного сигнала. Запись в ячейки эластичной памяти осуществляется последовательно. Допустим, в эластичной памяти две битовые ячейки, тогда первый бит входного сигнала будет записан в первую ячейку, второй – во вторую, третий – в первую, четвертый – во вторую и т.д. Поэтому к моменту записи очередного бита входного сигнала в ячейку эластичной памяти информация из нее должна быть уже считана. Распределитель считывания управляется от генератора мультиплексора на передаче и от генератора демультиплексора на приеме с фазовой автоподстройкой. Цепи распределителя записи и распределителя считывания от одной ячейки подключены ко входам временного детектора. Во временном детекторе установлены пороговые значения, соответствующие возможностям опустошения или переполнения эластичной памяти. Чтобы эти события не наступили, на выходе временного детектора при достижении расхождения фаз на его входах, равного или превышающего пороговые значения, формируется сигнал необходимости цифровой коррекции, и затем эта коррекция выполняется.
Рисунок 6.1 – Асинхронная передача компонентных сигналов с цифровой коррекцией. 1, 2,...L – ячейки эластичной памяти, «Пер.с.к.» – передатчик сигналов контроля цифровой коррекции
При обсуждении общих положений цифровой коррекции со вставками в литературе используются такие термины, как отрицательные и положительные вставки. Кроме информационных сигналов от передатчика к приемнику непрерывно поступает сигнал контроля (или управления) цифровой коррекции.
Допустим, частота записи больше частоты считывания. Возможно переполнение эластичной памяти. Чтобы этого не произошло, один информационный символ при выполнении цифровой коррекции передается по специальному каналу, а не на позициях, которые используются для информации при отсутствии цифровой коррекции. При этом структура сигнала контроля должна соответствовать состоянию процедуры цифровой коррекции. На рис. 6.2 приведены временные диаграммы цифровых сигналов и фазовые дрожания при цифровой коррекции с отрицательными вставками. Символы на тактовых интервалах (i+4) и (i+5) считываются одновременно, но символ на тактовом интервале (i+5) передается по специальному каналу, а затем на приеме по сигналу контроля цифровой коррекции он опять включается в общий поток информации. Фазовые дрожания показаны при объеме эластичной памяти, равном одному биту.
Допустим, частота записи меньше частоты считывания. Возможно опустошение эластичной памяти. Чтобы этого не произошло, один балластный символ вводится в сплошной информационный сигнал, кроме того, изменяется структура сигнала контроля цифровой коррекции. На рис. 6.3 показаны временные диаграммы сигналов и фазовые дрожания при цифровой коррекции с положительными вставками. Балластные символы или (Stuffing) вводятся между информационными символами, которые передаются на тактовых интервалах (i+1) и (i+2), (i+4) и (i+5). На приеме по сигналу контроля эти балластные символы исключаются из цифрового потока.
Фазовые дрожания показаны при объеме эластичной памяти, равном одному биту. Моменты выполнения цифровой коррекции зависят от погрешности скорости или тактовой частоты входного потока, от погрешности тактовой частоты генератора мультиплексора, от объема эластичной памяти. В пороговое значение временного детектора входит объем эластичной памяти. Объем эластичной памяти рассчитывается с учетом большого числа факторов, влияющих на качество передачи сигналов в цифровых трактах. Однако в цифровых трактах с устройствами цифровой коррекции из-за несоответствия частот записи и считывания в особенных ситуациях возможны проскальзывания (Slip). В данном разделе эти искажения не рассматриваются.
Цифровая коррекция со вставками используется в мультиплексорах PDH и SDH.
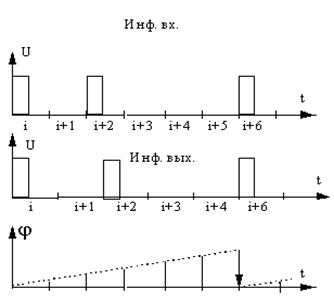
Рисунок 6.2 – Цифровая коррекция с отрицательными вставками
Фазовые дрожания на рисунке равны разности моментов считывания и моментов записи и отнесены к началу такта входного сигнала.
Рисунок 6.3 – Цифровая коррекция с положительными вставками
В SDH сигналы виртуальных контейнеров формируются с использованием процедуры отображения (mapping) с цифровой коррекцией со вставками из сплошных потоков данных или информационных компонентных потоков в том случае, если компонентные сигналы являются асинхронными по отношению к сигналам мультиплексора SDH. В SDH вставки называют «управляемыми».
Для анализа процедуры отображения могут быть использованы следующие параметры:
TZ - длительность цикла виртуального контейнера,
NZ - общее количество битов в цикле виртуального контейнера.
Погрешность скорости компонентного потока в миллионных долях номинальной скорости равна a(ppm).
Cфакт = Сном ± a(ppm) = Cном ± a ×10-6 × Сном.
Для безызбыточного двоичного сигнала численные значения скорости и тактовой частоты одинаковы, тогда частота записи равна тактовой частоте компонентного сигнала

Частота считывания определяется тактовой частотой сигнала виртуального контейнера. Так как стабильность частоты виртуального контейнера значительно выше стабильности частот компонентных потоков, для расчетов можно допустить, что погрешность этой частоты равна нулю.
Виртуальный контейнер заполняется информационными битами по различным картам (MAPn), которые определяются числом информационных битов в его цикле.
В сигнале виртуального контейнера предусмотрены постоянные тактовые интервалы для информационных битов и управляемых вставок. Управляемые вставки могут быть либо информационными, либо балластными. В обозначение номера карты входит количество балластных битов на тактовых интервалах управляемых вставок. Для каждой карты можно рассчитать количество информационных битов по формуле
(NZинф - n),
где NZинф – максимальное количество информационных битов в цикле контейнера (обычно это соответствует заполнению контейнера по MAP0).
Для расчетов будем считать, что погрешность тактовой частоты компонентного потока постоянна во времени. Допустим, что заполнение виртуального контейнера начинается с той карты, при которой частота компонентного потока равна номинальной и, обозначая расхождение фаз распределителей считывания и записи за один цикл через jitter(MAPn), получим
 , (6.1)
, (6.1)
Пороговые значения ВД равны: 0 и  , где ES – количество битовых ячеек в эластичной памяти, на рис. 6.1 L=ES.
, где ES – количество битовых ячеек в эластичной памяти, на рис. 6.1 L=ES.
Цифровая коррекция будет выполнена при заполнении контейнера по карте MAPn по истечении Х1 циклов, когда расхождение фаз последовательностей считывания и записи, подключенных к одной ячейке Эластичной Памяти, будет равно пороговому значению Временного Детектора. Точно последнее условие можно выполнить только при моделировании процесса отображения программным путем. Поэтому при ориентировочных расчетах можно допустить выполнение коррекции в конце цикла виртуального контейнера.
Если погрешность частоты компонентного сигнала равна нулю, то при заполнении контейнера по карте, обеспечивающей номинальную скорость компонентного потока,
jitter = 0.
Для асинхронных компонентных потоков величина погрешности не равна нулю и имеет значение больше или меньше нуля. Примем величину погрешности больше нуля, тогда цифровая коррекция выполняется, когда
 (6.2)
(6.2)
Если же величина погрешности частоты меньше нуля, то цифровая коррекция выполняется при условии
 (6.3)
(6.3)
Величины количества циклов (Х) по данным расчетов следует округлять в большую сторону до ближайшего целого значения.
После цифровой коррекции заполнение виртуального контейнера будет выполняться по другой карте. Номер следующей карты может быть рассчитан по формуле
n = n - sign(jitter'(MAPn)), (6.4)
где jitter' – первая производная фазовых дрожаний по времени, sign(jitter') – знаковая функция, равна (1) при положительном аргументе и равна (-1) при отрицательном аргументе.
Следующий интервал времени до момента цифровой коррекции может быть рассчитан в величинах циклов (Х2) из формулы (при условии, что количество циклов до момента первой коррекции было рассчитано из (6.2)
X1 × jitter(MAPn) + X2 × jitter(MAP(n - sign(jitter'(MAPn))) = 0, (6.5)
после подстановки из (6.2)
 (6.6)
(6.6)
Если же значение количества циклов до момента первой коррекции было получено из (6.3), то для расчета количества циклов до момента второй цифровой коррекции необходимо использовать следующие формулы:
 , (6.7)
, (6.7)
 . (6.8)
. (6.8)
Для расчетов количества циклов до момента третьей цифровой коррекции необходимо добавить в (6.5) или (6.7) еще одно слагаемое. Но можно пользоваться более простыми соотношениями, которые могут быть получены на основании приведенных выше (6.5) – (6.8). Результаты расчета позволяют построить временную зависимость фазовых дрожаний в тракте виртуального контейнера для компонентного сигнала. При этом по оси абсцисс можно отложить в линейном масштабе либо количество циклов между моментами цифровой коррекции, либо время, а по оси ординат – величину фазовых дрожаний. Без учета сглаживания (smoothing) на приеме макисмальная величина фазовых дрожаний равна одному тактовому интервалу в момент выполнения цифровой коррекции. При постоянном значении погрешности скорости компонентного сигнала формирование сигнала виртуального контенера выполняется в установившемся режиме по двум картам. Ниже приведен пример расчета временной зависимости фазовых дрожаний при асинхронном отображении для сигнала Е4. По структуре цикла VC-4 можно рассчитать пропускную способность тракта этого контейнера и параметры карт. Данные приведены в табл. 6.1.
Общее количество битов в VC-4 - 18792, скорость сигнала VC-4 - 150336 кбит/с. Допустим, погрешность скорости равна a(ppm) = 1, размер эластичной памяти ES=8.
Заполнение сигнала VC-4 начинается по карте MAP7.
 .
.
Пороговое значение временного детектора  , тогда количество циклов до момента первой цифровой коррекции из (6.2)
, тогда количество циклов до момента первой цифровой коррекции из (6.2)
X1 = 287.
Далее заполнение VC-4 осуществляется по карте MAP6
 .
.
Пороговое значение ВД равно 0, количество циклов до момента второй цифровой коррекции из (6.5)
X2 = 8.
Далее заполнение контейнера опять по карте MAP7.
Таблица 6.1 – Параметры VC-4
| Карты VC-4
| Количество информационных битов в цикле
| Количество балластных вставок в цикле
| Пропускная способность тракта VC-4
|
| MAP0
| 17415
| 0
| 139320
|
| MAP1
| 17414
| 1
| 139312
|
| MAP2
| 17413
| 2
| 139304
|
| MAP3
| 17412
| 3
| 139296
|
| MAP4
| 17411
| 4
| 139288
|
| MAP5
| 17410
| 5
| 139280
|
| MAP6
| 17409
| 6
| 139272
|
| MAP7
| 17408
| 7
| 139264
|
| MAP8
| 17407
| 8
| 139256
|
| MAP9
| 17406
| 9
| 139248
|
6.2. Фазовые дрожания компонентных потоков в трактах SDH,
вызываемые процедурой обработки указателей
В технологии SDH отсутствует фазирование между циклами виртуальных контейнеров низкого порядка по отношению к трактовым заголовкам контейнеров высокого порядка и между циклами виртуальных контейнеров высокого порядка и секционными заголовками синхронных транспортных модулей. Поэтому при записи сигналов виртуальных контейнеров в TU-n или AU-n используются указатели (Pointer – PTR). В синхронной аппаратуре предусмотрена возможность изменения значений указателей. Эта процедура осуществляется при использовании цифровой коррекции по прямой линии (aligning). При отрицательной цифровой коррекции величина значения указателя уменьшается, при положительной цифровой коррекции – увеличивается. В том случае, если величина значения указателя не изменяется, цифровая коррекция называется нулевой. Величина фазовых дрожаний из-за изменения значений указателей вместе с фазовыми дрожаниями, вызываемыми процедурой асинхронного отображения компонентных сигналов в виртуальные контейнеры, называется комбинированным джиттером, вносимым синхронной аппаратурой. В Рекомендации G.783 приведены допустимые значения комбинированного джиттера для различных компонентных потоков в трактах SDH.
Рассмотрим процедуру обработки указателей при записи сигналов VC-n в TU-n (n=1, 2), а также VC-n в AU-n (n=3, 4). Функциональная модель устройства аналогична схеме на рис. 6.1. Эластичная память состоит из L ячеек, но так как в табл. 5 размеры эластичной памяти (ES) указаны в байтах, то в битах – L=ES×8. Запись осуществляется с тактовой частотой сигналов виртуальных контейнеров с допустимой величиной погрешности. Считывание ведется с тактовой частотой сигналов TU-n или AU-n. Погрешность частоты считывания будем считать равной нулю. Пороговые значения временного детектора выбраны равными 0 и  .
.
На рис. 6.4 и 6.5 приведены временные диаграммы процессов цифровой коррекции по прямой линии. Как видно из рис. 6.4, при уменьшении длительностей циклов сигнала записи, тогда как длительности циклов сигнала считывания остаются постоянными, величина фазовых дрожаний возрастает, и при достижении значения, равного пороговому, осуществляется цифровая коррекция. При этом значение указателя уменьшается на единицу (отрицательная коррекция). При увеличении длительностей циклов сигнала записи, тогда как длительности циклов сигнала считывания остаются постоянными (рис. 6.5), расхождение фаз уменьшается и, когда оно достигает порогового значения, выполняется цифровая коррекция. При этом величина указателя увеличивается на единицу (положительная коррекция).
Введем следующие обозначения:
jitter – расхождение фаз распределителей считывания и записи за один цикл,
NZTU , NZAU – количество битов в циклах TU и AU,
fTU, fAU – тактовые частоты считывания TU и AU,
X – число циклов между моментами коррекции.
Величина расхождения фаз распределителей считывания и записи за один цикл может быть рассчитана по формулам
 . (6.9)
. (6.9)
Рисунок 6.4 – Отрицательная цифровая коррекция по прямой линии
Рисунок 6.5 – Положительная цифровая коррекция по прямой линии
Если погрешность частоты входного сигнала положительная, то цифровая коррекция по прямой линии выполняется через количество циклов, которое может быть рассчитано из формулы
 . (6.10)
. (6.10)
Расхождение фаз после изменения значения указателя на единицу будет равно
 ,
,
где M = 8 при формировании TU и M=24 при формировании AU.
Если погрешность частоты входного сигнала отрицательная, то для расчетов значений количества циклов между моментами цифровой коррекции может быть использована формула
 (6.11)
(6.11)
Расхождение фаз последовательностей считывания и записи после цифровой коррекции, т.е. после изменения указателя на единицу, будет равно
 .
.
Обозначим первоначальное значение указателя или поинтера PTR, тогда после коррекции величина поинтера (PTR1) будет равна
PTR1 = PTR - sing(jitter'),
после момента второй коррекции
PTR2 = PTR1 - sing(jitter') и т.д. (6.12)
Количество циклов до момента второй коррекции можно рассчитать из формулы
 , (6.13)
, (6.13)
или из формулы
 . (6.14)
. (6.14)
Для компонентного сигнала в тракте виртуального контейнера временная зависимость фазовых дрожаний может быть построена следующим образом. Допустим, что тактовая частота или скорость сигнала виртуального контейнера постоянна и может быть рассчитана с учетом заданной погрешности или нестабильности. Тактовые частоты сигналов TU и AU равны номинальным. Допустим, что отсутствуют фазовые дрожания из-за асинхронного отображения, а также из-за большого числа причин, которые всегда существуют и учитываются в реальных трактах.
Максимальная величина фазовых дрожаний при изменении значения поинтера для разных трактов зависит от размерности его величины. Для сигнала E4 изменение поинтера на единицу при записи сигнала VC-4 в сигнал AU-4 соответствует смещению на три байта, для всех других сигналов - на один байт. Поэтому по оси ординат следует отложить максимальную величину фазовых дрожаний (в единицах времени), равную для E4 3×8×Т, и для других сигналов 1×8×Т, где Т - длительность номинального такта компонентного сигнала. По оси абсцисс в масштабе времени или количествах циклов следует отложить величины, рассчитанные по (6.10), (6.11), (6.13), (6.14). Формулы для расчета количества циклов до моментов третьей, четвертой и пятой цифровых коррекций следует вывести самостоятельно. График должен содержать не менее пяти интервалов между моментами цифровой коррекции. Для каждого интервала по (6.12) необходимо рассчитывать и указывать рядом с соответствующими интервалами значения поинтера.






