Цель работы – изучить зависимости энергетических параметров преобразователя (P, Q, S, cosj, состава гармоник тока и напряжения) от режима преобразователя.
3.2.1. Вопросы для самоподготовки
При ответах на вопросы воспользуйтесь диаграммами токов напряжений преобразователя в режимах выпрямления и инвертирования.
1. Как зависит cosj преобразователя от углов регулирования при выпрямлении и инвертировании при работе преобразователя в режиме 2?
2. Как изменяется cosj преобразователя в режимах выпрямления и инвертирования с увеличением угла коммутации тиристоров?
3. Как зависит cosj преобразователя от величины тока при неизменном угле регулирования?
4. Какие должны быть углы регулирования преобразователем в режимах выпрямления и инвертирования, чтобы он потреблял минимальную реактивную мощность?
5. Какие гармоники присутствуют в токе фазы преобразователя? Пояснить присутствие низшей из «высших» гармоник в токе фазы преобразователя.
6. Какие гармоники присутствуют в выпрямленном напряжении преобразователя?
7. Какие гармоники будут в фазном токе сети, питающей два трехфазных мостовых преобразователя, имеющих одинаковые углы регулирования, а также одинаковые выпрямленные токи и напряжения, если один из преобразователей соединен с сетью трансформатором с обмотками, выполненными по схеме Y/Y – 0, а другой по схеме Y/Δ – 11?
8. Какие гармоники будут в выпрямленном напряжении, полученном при последовательном согласном («+» одного преобразователя соединен с «–» другого) соединении цепей постоянного тока двух трехфазных мостовых преобразователей, имеющих одинаковые углы регулирования, постоянные токи и напряжения, если один из преобразователей соединен с сетью трансформатором с обмотками, выполненными по схеме Y/Y – 0, а другой по схеме Y/Δ – 11?
3.2.2. Предварительная подготовка
За основу взять вариант предварительной подготовки по исследованию преобразователя в режимах выпрямления (табл. 1.4) и инвертирования (табл. 2.1).
2. Определить величины активной и реактивной мощности, cosj преобразователя в режимах выпрямления и инвертирования и построить векторные диаграммы, соответствующие этим режимам.
2. Рассчитать и построить зависимости cosj от Id при a = 0 град. эл. и a = 30 град. эл., а также a, соответствующем варианту. На последней зависимости показать точку, соответствующую режиму по заданному варианту.
3. Рассчитать и построить зависимость cosφ преобразователя от угла управления. На зависимости показать точки, соответствующие режимам выпрямления и инвертирования по заданному варианту.
4. Для режима выпрямления, Е 2=12 В и угла управления по принятому варианту рассчитать и построить зависимость cosφ преобразователя от величины L γ. Диапазон L γ взять от 0 до 1,1 мГн.
5. Для заданного варианта в одной системе координат построить диаграммы: тока фазы преобразователя в режиме выпрямления, его первой гармоники, фазного напряжения. Указать углы α, γ, φ.
6. Для заданного варианта в одной системе координат построить диаграммы: тока фазы преобразователя в режиме инвертирования, его первой гармоники, фазного напряжения. Указать углы β, γ, φ.
Программа испытаний
1. Подготовить универсальный лабораторный стенд для исследования работы трехфазного мостового преобразователя в режиме выпрямления (см. п. 1.3.3). Использовать правый преобразователь. В нагрузку преобразователя включить резистор с сопротивлением Rd = 6 Ом и реактор Ld.
2. Подать питание на преобразователь. Убедиться в работоспособности преобразователя.
3. Снять импульсы управления с тиристоров преобразователя и измерить активную и реактивную мощности холостого хода трансформатора.
4. Снять зависимости активной и реактивной мощности, потребляемой преобразователем и трансформатором, и угла управления α от напряжения питания преобразователя Е 2 при постоянных Id и Ud. Измерения рекомендуется начинать с минимального значения Е 2.
5. Снять зависимости активной и реактивной мощности, потребляемой преобразователем и трансформатором, от величины тока Id при постоянном угле управления α. Напряжение питания преобразователя Е 2=12 В.
6. Снять зависимости активной и реактивной мощности, потребляемой преобразователем и трансформатором, от величины индуктивности сети L γ при постоянной величине угла управления и Rd.
7. Подготовить универсальный лабораторный стенд для исследования преобразователя (правая часть стенда) в режиме инвертирования (см. п.2.5.3). Принять Rd =0 Ом.
8. Включить питание преобразователей. Убедиться в их работоспособности. При испытаниях следить за величиной тока Id и не допускать продолжительной работы стенда (>10 с) при опрокидывании инвертора.
9. Установить максимальное напряжение выпрямителя (αВ=0).
10. Снять зависимости активной и реактивной мощности, потребляемой преобразователем и трансформатором, от величины угла управления β инвертора. При выполнении измерений следить за величиной тока Id и не допускать продолжительной работы стенда (>10 c) при опрокидывании инвертора.
11. Отключить выключатели питания стенда. Разобрать схему.
Содержание отчета
1. Результаты предварительной подготовки п. 3.2.2.
2. Экспериментальные данные исследования режимов п. 3.2.3 (таблицы, значения).
3. По результатам п.4 программы испытаний рассчитать и построить зависимость cosφ(α) для преобразователя при Pd =const с учетом мощностей холостого хода трансформатора.
4. Рассчитать и построить зависимость cosφ(Id) для преобразователя при α=const с учетом мощностей холостого хода трансформатора.
5. Рассчитать и построить зависимость cosφ(L γ) для преобразователя при α=const с учетом мощностей холостого хода трансформатора.
6. Рассчитать и построить зависимость cosφ(β) для преобразователя в режиме инвертирования с учетом мощностей холостого хода трансформатора.
Примечание: Каждый этап обработки экспериментальных данныхдолжен сопровождаться анализом и выводами.
4. СИСТЕМЫ ИМУЛЬСНО-ФАЗОВОГО УПРАВЛЕНИЯ МНОГОФАЗНЫМИ ТИРИСТОРНЫМИ ПРЕОБРАЗОВАТЕЛЯМИ
4.1. Назначение системы управления тиристорами
Системы импульсно-фазового управления (СИФУ) предназначены для создания в цепях управления тиристоров токов в моменты времени, когда требуется их включение.
Возможны различные способы управления тиристорами, реализующие различные алгоритмы управления в преобразователе: импульсно-фазовое симметричное или несимметричное, различные способы широтно-импульсной модуляции или широтно-импульсного регулирования и др. В преобразователях тока, применяемых в электроэнергетике, распространено симметричное импульсно-фазовое управление, при котором углы запаздывания включения (углы a) для всех тиристоров преобразователя одинаковы. Система управления, создающая импульсы управления тиристорами (СУТ), при этом получила название: «Система импульсно-фазового управления» – СИФУ.
СИФУ является связующим звеном между системами автоматического и автоматизированного регулирования (САР) и вентильной частью тиристорного преобразователя. На вход СИФУ подается сигнал управления с выхода САР. На выходе системы управления должны создаваться токи управления тиристорами, моменты появления которых (углы a) определяются сигналом на входе согласно заложенному в СИФУ алгоритму управления.
4.2. Характеристика управления СИФУ
Характеристика управления определяет связь моментов появления импульсов управления на выходе СИФУ (углов a) c величиной напряжения на входе СИФУ – напряжением управления U У.
Чтобы получить линейную зависимость напряжения на шинах постоянного тока трехфазного мостового преобразователя от напряжения управления
|
|  , ,
| (4.1)
|
стремятся создать арккосинусоидальную характеристику управления СИФУ. Действительно, если характеристика управления СИФУ:
|
| 
| (4.2)
|
то, учитывая, что постоянное напряжение преобразователя
|
|  , ,
| (4.3)
|
и напряжение управления:
|
|  , ,
| (4.4)
|
то получим линейную зависимость U d от U У (4.1):
|
|  . .
| (4.5)
|
Кроме арккосинусоидального закона управления в СИФУ также применяют линейный закон, релизующий косинусоидальную взаимосвязь между напряжением на шинах постоянного тока Ud и напряжением управления U У. Такие законы управления часто применяются в преобразователях электропривода, регулирования технологического процесса в гальванике и других областях.
4.3. Параметры СИФУ
4.3.1. Диапазон изменения углов управления
В преобразователе углы запаздывания включения каждого из тиристоров α должны изменяться на вполне определенном интервале периода напряжения сети, питающей преобразователь (в определенном диапазоне). Для каждого тиристора существует индивидуальный рабочий диапазон углов ΔαРАБ. Например, для режима выпрямления этот диапазон составляет 90 град. эл. (Δα = 0...90). Причем за ноль для тиристоров V 1, V 2, V 3, V 4, V 5, V 6 принимаются соответственно углы естественного включения α0 этих тиристоров.
СИФУ создает токи управления в своем диапазоне углов ΔαСИФУ. Для того, чтобы СИФУ могла управлять преобразователем во всем рабочем диапазоне изменения углов α, необходимо, чтобы диапазон ΔαСИФУ перекрывал диапазон ΔαРАБ. Операция согласования диапазонов ΔαСИФУ с ΔαРАБ называется синхронизацией СИФУ и вентильной части преобразователя.
4.3.2. Параметры импульсов управления
1) Амплитуда тока управления тиристорами, формируемого на выходе СИФУ, должна быть не менее амплитуды тока управления спрямления тиристоров i У.СПР. Для таблеточных тиристоров амплитуда тока управления i У,М может достигать 1 А (рис 4.1а).
2) Крутизна фронта импульса управления должна обеспечивать одновременное включение тиристоров при их групповом (параллельном и / или последовательном) соединении. Для этого обычно длительность переднего фронта импульсов тока управления не должна превышать 1 мкс. Рекомендуемая скорость нарастания тока управления для одного тиристора 0,2…2 А/мкс. С целью повышения крутизны фронта тока управления создают импульсы с форсированным фронтом, для которых амплитуда i У,М доходит до 10 А (рис. 4.1б).
3) Длительность импульса.
Время включения тиристоров, работающих на промышленной частоте 50 Гц, обычно не более 20 мкс. Разработчики преобразователей для обеспечения уверенного включения тиристоров в различных условиях эксплуатации принимают длительность импульсов токов управления не менее 1 мс (15 – 18 град. эл.).
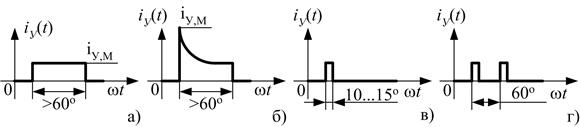 Рис. 4.1. Варианты импульсов управления
Рис. 4.1. Варианты импульсов управления
Чтобы “запустить” трехфазную мостовую схему, длительность им пульса тока управления должна быть больше 60 град. эл. (рис. 4.1а). При запуске трехфазного мостового преобразователя в режиме выпрямления тока Id нет. Для того, чтобы образовался контур для протекания тока Id и начали устойчиво включаться тиристоры необходимо чтобы включилось по одному тиристору в катодной и анодной группе преобразователя. Так как тиристоры включаются с интервалом 60 град. эл. (рис. 1.4), то и длительность импульсов управления должна быть более 60 град. эл. чтобы токи управления присутствовали одновременно на двух тиристорах. Можно подавать и короткие импульсы. Но тогда это должны быть сдвоенные импульсы токов управления – два импульса, следующие один за другим через 60 град. эл. (рис. 4.1г).
В преобразователях систем электроэнергетики чаще всего встречаются СИФУ, генерирующие импульсы 120 град. эл. и 10 град. эл. Первый режим «120» обеспечивает надежное включение тиристоров в различных режимах преобразователей, в частности, при запуске и в режиме прерывистых токов. В некоторых таких СУТ для снижения мощности выходных каскадов импульсы снимаются сразу после включения тиристоров и вновь восстанавливаются, как только прерывается ток тиристора, если это происходит в течение нормируемого времени включенного состояния тиристоров (120 эл. град. для трехфазной мостовой схемы). Второй режим «10» используется в преобразователях, в которых невозможны режимы прерывистых токов, а также, когда определяемая электромагнитными процессами в схеме длительность включенного состояния тиристоров в некоторых режимах мала. В любом случае для того, чтобы обеспечить надежное выключение тиристора, до того, как ток тиристора снизится до нуля и на нем появится обратное напряжение, ток управления тиристора должен прекратиться.
4) Несимметрия импульсов – отклонение моментов появления токов управления от нормируемой величины. Для СИФУ с симметричным управлением тиристоров в трехфазной мостовой схеме импульсы на очередные тиристоры должны приходить через 60 град. эл. На тиристоры одной группы (катодной или анодной) через 120 град. эл. На тиристоры одной фазы (работающие в противофазе) через 180 град. эл.
Несимметрия импульсов СИФУ приводит к тому, что становится разной длительность токов тиристоров. Это может приводить к перегреву отдельных тиристоров и к появлению постоянной составляющей в фазном токе преобразователя.
· Внутрифазная несимметрия (несимметрия в формировании импульсов токов управления для тиристоров одной фазы) приводит к появлению постоянной составляющей в фазном токе и, следовательно, к работе магнитопроводов трансформаторов и электрических машин с несимметричной (не нормируемой расчетом этих устройств) петлей намагничивания.
· Междуфазная несимметрия (несимметрия в формировании импульсов токов управления для тиристоров разных фаз катодной или анодной группы) приводит к перегреву тех тиристоров, длительность токов которых оказывается выше нормируемой.
· Несимметрия импульсов, поступающих на тиристоры с групповым соединением приводит к неодновременному включению тиристоров в группе и как результат кратковременных, но существенных их перегрузках по току (из-за неодновременного включения параллельных тиристоров в группе) или появлению на них кратковременных перенапряжений (из-за неодновременного включения последовательных тиристоров).
4.4. Классификация, структурная схема и принципы построения СИФУ
В системах управления, выполненных на базе транзисторов и больших интегральных микросхем, реализация основных функций основана на обработке аналоговых сигналов, поэтому эти системы называют аналоговыми. С начала ХХI века в работу вводятся только преобразователи с микропроцессорным управлением. СИФУ таких преобразователей выполнены на основе микропроцессоров, обработка сигналов, формирование углов a и длительностей токов управления тиристоров в них выполняется программно. Структура алгоритмов обработки сигналов микропроцессорных систем во многом соответствует алгоритмам аналоговых систем. Сегодня в электроэнергетике находится в эксплуатации большое количество полупроводниковых преобразователей с системами управления, выполненными на базе транзисторов и больших интегральных микросхем. Поэтому рассмотрим классификацию, структурные схемы и принципы построения СИФУ на базе аналоговой СИФУ, широко распространенной в преобразователях систем возбуждения синхронных генераторов, а также входящей в состав универсальных лабораторных стендов лаборатории «Системы электроэнергетики с силовыми полупроводниковыми преобразователями» кафедры ЭССиС ЮУрГУ.
Чтобы правильно сформировать рабочий диапазон ΔaСИФУ, т. е. правильно выполнить синхронизацию СИФУ и вентильной части преобразователя, нужна информация о напряжениях всех фаз силовой части преобразователя. Для этого связь силовой части преобразователя и СИФУ осуществляется с помощью трансформатора напряжения Т V (рис.4.2). Трансформаторы напряжения изготавливают на стандартное напряжение вторичной обмотки 100 В, что позволяет выпускать унифицированные СИФУ. Напряжения силовой части U 1 и U 2 несинусоидальны, имеют провалы, которые появляются из-за падений напряжений на сопротивлениях фаз сети, связанной с преобразователем, при коммутациях тиристоров.
Для правильной работы СИФУ нужна первая гармоника силового напряжения. Для ее выделения (U 3) в аналоговых СИФУ вводится блок фильтров А 1 БФ (рис. 4.2). Первоначально в СИФУ применялись последовательно-параллельные резонансные фильтры, выполненные на базе дросселей (реакторов) и конденсаторов. Их недостатки: большие размеры и сложность компенсации изменения фазового сдвига при разной частоте питающей сети. Последнее, например, вызывает проблемы в работе СИФУ при изменении частоты питающей сети в переходных и аварийных процессах. Кроме того, такой фильтр настроен только на одну частоту, а со временем его параметры «уходят». Свободны от этих недостатков электронные фильтры и используемые в цифровых системах управления «программные». Они адаптивны к изменению частоты первой гармоники напряжения питающей сети. Программные фильтры отличаются стабильностью параметров при изменении внешних факторов, и старении элементов процессора.

Рис. 4.2. Структура СИФУ
Следующий элемент аналоговой СИФУ – трансформатор синхронизации TS (рис. 4.2), который позволяет синусоидальное напряжение U 3 дискретно сдвигать по фазе относительно силовых напряжений. Для этого первичные обмотки трансформатора могут быть соединены либо в «звезду», либо в «треугольник», либо в «зигзаг». В промышленных СИФУ при этом удаётся дискретно изменять фазу вторичного напряжения трансформатора обычно со сколь угодно малым шагом (например, 7,5 град. эл.). Вторичные обмотки трансформатора соединены в схему «две обратные звезды». В результате формируется шесть синусоидальных напряжений, сдвинутых по фазе на 60 град. эл. Они называются опорными и создают опорные напряжения для формирования переднего фронта импульса тока управления. В цифровых СИФУ необходимости в отдельном трансформаторе синхронизации нет – фазовый сдвиг осуществляется программно. Для типовой цифровой системы управления достаточно иметь трехфазную систему напряжений – три фазных напряжения или два линейных.
Системы управления могут быть многоканальными и одноканальными.
Многоканальная система – это система, в которой импульс тока управления для каждого тиристора (группы параллельно и последовательно соединенных тиристоров) формируется в отдельном канале. Недостатки такой СИФУ – невозможность выполнить все шесть каналов идентичными. Поэтому трудно обеспечить нормируемую несимметрию. Однако, наличие шести одинаковых каналов делает систему простой в наладке и эксплуатации. Поэтому сегодня в полупроводниковых преобразователях, применяемых в электроэнергетике, большая часть систем управления многоканальные.
Одноканальная система формирует все шесть импульсов управления в одном канале. Затем демультиплексор (распределитель) раздает импульсы токов управления по отдельным тиристорам. Нормируемую несимметрию в одноканальных СИФУ получить легче, чем в многоканальных. Однако, одноканальные СИФУ трудней синхронизировать, особенно при несимметричной трехфазной системе силового напряжения. Микропроцессорные СИФУ обычно выполняются одноканальными.
По виду управляющего сигнала (напряжению управления, сигналам изменения уставок, настроек и т. д.) СИФУ делятся на системы с аналоговым и цифровым управлением.
По методу обработки информации СИФУ также делятся на аналоговые и цифровые.
Сегодня в основном в эксплуатации находятся аналоговые многоканальные СИФУ. Новые СИФУ, как правило, – цифровые, они выполняются на базе микропроцессоров. В этих системах управления легко достигается нормируемая несимметрия токов управления тиристорами многофазных преобразователей и практически любые законы управления.
В каждый канал управления многоканальной СИФУ входит ряд ключевых узлов.
Фазосдвигающее устройство – это устройство, которое позволяет формировать и изменять момент подачи импульса тока управления на тиристор, т. е. регулировать угол a преобразователя. На вход ФСУ (рис. 4.2) поступают: напряжение синхронизации U 3, напряжение управления U У и напряжение смещения характеристики управления U СМ. На выходе ФСУ формируется управляющий импульс, определяющий угол управления α.
Принцип управления, при котором изменение напряжения управления приводит к перемещению по вертикали опорного напряжения и в результате к изменению угла a, называется вертикальным принципом управления. Так же есть системы с горизонтальным управлением. На этом принципе построены цифровые, в том числе, и микропроцессорные системы управления.
Формирователь импульсов управления А3 Ф (рис. 4.2) создает импульс с заданной формой и длительностью. Момент появления переднего фронта сформированного импульса определяется сигналом с выхода ФСУ (А 2). Например, для схемы на рис. 4.2. формирователь импульса управления запускается при спадающем фронте импульса с ФСУ (стрелка вниз на А 3).
Сформированный в формирователе импульс управления тиристором усиливается до необходимой величины с помощью усилителя А 4 УМ и поступает на блок потенциальной развязки.
Блок потенциальной развязки (блок гальванической развязки БГР А 5) предназначен для разделения низковольтных цепей СИФУ и силовой части тиристорного преобразователя, находящейся под высоким напряжением. Без этого блока каждый канал СИФУ пришлось бы выполнять с классом изоляции, соответствующим напряжению силовой части, что существенно увеличило бы стоимость СУТ и усложнило обслуживание. Функцию гальванической развязки также выполняет трансформатор напряжения TV.
БГР может выполняться на базе оптических или электромагнитных элементов.
Блоки потенциальной развязки на электромагнитных элементах (блоки выходных трансформаторов, БВТ) выполнены на основе трансформатора (рис. 4.3).
Сформированный формирователем Ф А 3 (рис. 4.2) импульс u И(t) (рис. 4.3б) усиливается усилителем А 4. Если его затем подать на первичную обмотку трансформатора Т (рис. 4.3а) то, так как трансформатор не передает постоянную составляющую, на выходе выпрямителя, собранного на диодах VD 1 и VD 2 появятся два импульса (рис. 4.3в), соответствующие фронтам импульса тока первичной обмотки трансформатора. Длительность этих импульсов будет определяться индуктивностями обмоток трансформатора и для того, чтобы обеспечить протекание тока управления через тиристор больше 60 град. эл. на частоте 50 Гц требуются существенные размеры магнитопровода. Поэтому такую схему формирования тока управления тиристором и потенциальной развязки применяют только в тех случаях, когда не требуется большая длительность импульсов управления и некритична их форма, т. е. в самых простых случаях.

Рис. 4.3. Схема и диаграммы сигналов БВТ
Для обеспечения правильной передачи формы импульса через БВТ сигнал, сформированный формирователем Ф А 3, перед подачей на усилитель УМ А 4 модулируют напряжением высокой частоты 15…22 кГц. Получается переменное напряжение высокой частоты без постоянной составляющей (рис. 4.3г). Это напряжение создает в первичной обмотке трансформатора ток высокой частоты, который практически без искажений трансформируется во вторичную обмотку и затем выпрямляется. Такой принцип формирования тока управления тиристором i У(t) (рис. 4.3д) позволяет передать форму импульса и существенно уменьшить размеры магнитопровода трансформатора.
Резистор R 1 ограничивает ток управления тиристором и применяется, в том числе, для равномерного деления тока с УМ между группой последовательно или параллельно включенных тиристоров (БВТ устанавливается для каждого из тиристоров в группе). Резистор R2 уменьшает время выключения тиристора, разряжая емкость управляющего электрода.
Электромагнитные блоки потенциальной развязки нашли широкое применение в преобразователях до 10 кВ. В последнее время существенно снизилась стоимость элементов оптоэлектроники, стоимость цветных металлов увеличилась. Кроме того, повысились требования к быстродействию узлов управления. Поэтому электромагнитные БПР вытесняются оптическими устройствами.
Оптические блоки потенциальной развязки обладают двумя существенными преимуществами по сравнению с электромагнитными. Во-первых, в оптическом устройстве БПР проще обеспечить высокий класс изоляции, и во-вторых в нем не требуется дополнительная обработка сигнала для передачи его формы.
Оптические БПР можно разделить по следующим признакам:
а) по типу оптического канала:
- с открытым каналом;
- с закрытым каналом модульные;
- с закрытым каналом оптоволоконные.
б) по типу управления силовым прибором:
- с непосредственным управлением силовым прибором;
- с промежуточным драйвером.
в) по типу источника оптического излучения:
- светодиодные;
- светодиодные лазерные.
Во всех оптических БПР в настоящее время источник излучения – инфракрасный светодиод, обычно с длиной волны около 1 мкм. В простейших полупроводниковых элементах с оптической развязкой светодиод непосредственно освещает структуру фотоприемника – фотодиода, фототранзистора или фототиристора. Например, примененные в универсальном стенде тиристоры ТО2-40 состоят из светодиода, имеющего два вывода для подачи тока управления и структуры фототиристора, которая освещается светодиодом (рис. 4.4а). Расстояние между светодиодом и структурой тиристора примерно 5 мм, что соответствует допустимому напряжению на изоляции 2 кВ.
Оптоэлектронные приборы, выполненные в миниатюрных корпусах, например микросхемы, работают как при непосредственном освещении фототиристора (рис. 4.4в), так и при отражении луча от зеркала (рис. 4.4г).
Второй вариант применяется в мощных полупроводниковых блоках тиристоров. При высоких напряжениях, единицы – сотни киловольт, источник излучения и тиристор разносят на большое расстояние и передачу излучения осуществляют по оптоволоконному кабелю (рис. 4.4б). При этом применяется лазерный светодиод со специальной фокусирующей системой. Также возможна реализация управления по открытому оптическому каналу, когда лазерный луч передается по воздуху от лазеров СИФУ до приемников, перенаправляющих лазерные лучи непосредственно на структуры тиристоров в составе высоковольтных блоков (рис. 4.4е). При реализации открытого оптического управления изоляция канала становится проще, но при этом снижается его надежность. В настоящее время такой способ управления используется весьма ограниченно.
Схема оригинального варианта исполнения блока гальванической развязки приведена на рис. 4.4д. Её особенность в том, что усилитель мощности УМ вынесен за узел оптической развязки (диод-диодная оптопара) и питается от отдельного блока питания. Сама оптопара имеет небольшую мощность и невысокую стоимость. Такой принцип формирования тока управления тиристорами не требует от СИФУ мощных импульсов управления на выходе.
Работа и характеристики системы импульсно-фазового управления тиристорами, построенной по вертикальному принципу, подробно рассмотрена в п. 7.3.

Рис. 4.4. Оптические системы управления полупроводниковыми приборами
Лабораторная работа №4






