Цель работы: изучить особенности расчета потерь энергии и КПД асинхронного двигателя.
Подготовка к работе:
Для решения данной практической работы необходимо знать устройство и принцип действия асинхронного двигателя и зависимости между электрическими величинами, характеризующими его работу.
Мощность трехфазного асинхронного двигателя:
 , (1)
, (1)
где Р1, Q1 – активная и реактивная мощности двигателя.
Активная мощность двигателя Р1 определяет среднюю мощность необратимого преобразования в двигателе электрической энергии, получаемой из трехфазной сети, в механическую, тепловую и другие виды энергии, а реактивная мощность Q1 – максимальную мощность обмена энергией между источником и магнитным полем двигателя.
Преобразование энергии в двигателе показано на энергетической диаграмме (рис.1).
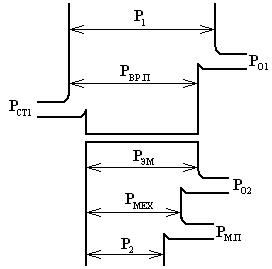
Рис.1
В ней исходной величиной является активная мощность потребления электрической энергии из трехфазной сети Р1.
Часть этой мощности Ро1 составляет мощность потерь на нагревание проводов обмотки статора. Остальная мощность преобразуется в мощность вращающегося магнитного поля Рвр.п, часть которой Рст1 составляет мощность потерь из-за гистерезиса и вихревых токов в сердечнике статора. Мощность потерь в сердечнике ротора, через который замыкается вращающийся магнитный поток, практического значения не имеет, так как частота тока в роторе f2 весьма мала (1-3 Гц), и мощность потерь из-за гистерезиса и вихревых токов незначительна.
Оставшаяся часть мощности вращающегося магнитного поля составляет электромагнитную мощность ротора
 . (1)
. (1)
Электромагнитный момент двигателя Мэм при при частоте вращения n2 определяется по формуле
 (2)
(2)
Чтобы определить механическую мощность Рмех, развиваемую ротором, из электромагнитной мощности нужно вычесть мощность потерь на нагревание проводов обмотки ротора Ро2. Следовательно,  , (3)
, (3)
Полезная механическая мощность Р2 на валу двигателя будет меньше механической мощности Рмех из-за механических потерь Рм.п в двигателе, т.е.
 (4)
(4)
Суммарные потери в двигателе ∑р = Ро1+Рст1+Ро2+Рм.п (5)
или ∑р = Р1 –Р2 (6)
Отношение полезной механической мощности Р2 на валу двигателя к активной мощности Р1 потребления электрической энергии из сети определяет КПД асинхронного двигателя:
 . (7)
. (7)
КПД современных трехфазных асинхронных двигателей при номинальном режиме работы составляет 0,8 -0,95.
Ход выполнения работы:
Переписать условие задачи. Данные для своего варианта взять из таблицы 1. Решение необходимо выполнять по действиям с нумерацией и краткими пояснениями.
Асинхронный трехфазный двигатель с короткозамкнутым ротором при номинальной мощности Р2, напряжении Uном, и токе Iном потребляет из сети мощность Р1. КПД двигателя ηном, а коэффициент мощности cos φном. Потери в обмотках статора Ро1, в стали статора Рст1, в обмотках ротора Ро2, механические Рм.п. Суммарные потери в двигателе ∑р. Электромагнитная мощность, передаваемая магнитным потоком ротору, Рэм. Двигатель развивает номинальный момент Мном и электромагнитный момент Мэм при частоте вращения n2. Определить величины, отмеченные прочерками в таблице1.
Начертить в масштабе энергетическую диаграмму двигателя.
Таблица 1
| №
вар.
| Р2
| Uном
| Iном
| Р1
| η ном
| cosφ
| Ро1
| Рст1
| Ро2
| Рм.п
| ∑р
| Рэм
| Мном
| Мэм
| n2
|
| кВт
| В
| А
| кВт
|
|
| кВт
| кВт
| кВт
| кВт
| кВт
| кВт
| Нм
| Нм
| об/мин
|
|
| -
|
| 15,8
| -
| 0,88
| -
| 0,25
| -
| 0,15
| -
| -
| 4.73
| 29,8
| -
|
|
|
| -
|
| -
| 2,91
| 0,86
| 0,82
| -
| 0,1
| 0,08
| 0,05
| -
| -
| 8,22
| -
| -
|
|
| 4,5
|
| -
| -
| -
| 0,85
| 0,25
| -
| 0,15
| 0,08
| 0,62
| -
| 29,8
| -
| -
|
|
| -
|
| 5,38
| -
| 0,86
| 0,82
| 0,18
| 0,1
| 0,08
| -
| -
| -
| -
| -
|
|
|
| -
|
| 22,4
| -
| -
| -
| -
| 0,4
| -
| 0,2
| 2,2
| 20,8
|
| -
|
|
|
|
| -
| 14,2
| -
| -
| 0,85
| -
| 0,2
| -
| 0,11
| 0,96
| 7,36
| -
|
| -
|
|
| -
| -
| 22,4
| 22,2
| -
| 0,87
|
| -
| 0,6
| -
| 2,2
| 20,8
| -
| -
|
|
|
| 2,5
| -
| 5,38
| -
| 0,86
| 0,82
| 0,18
| -
| -
| 0,05
| -
| 2,53
| -
| 8,33
| -
|
|
|
|
| -
| 22,2
| -
| 0,87
|
| 0,4
| -
| 0,2
| -
| -
| -
| 20,8
| -
|
|
| -
|
| 14,2
| 7,96
| -
| -
| 0,4
| -
| 0,25
| -
| 0,96
| -
| -
| 7,36
|
|
Контрольные вопросы:
1. В чем сущность активной и реактивной мощности асинхронного двигателя?
2. Какие виды потерь имеют место в асинхронном двигателе и какова их природа?
3. Дайте определение КПД асинхронного двигателя.

Практическая работа № 13
ГЕНЕРАТОР ПОСТОЯННОГО ТОКА
Цель работы: изучить особенности расчета генераторов постоянного тока
Подготовка к работе: В настоящее время одним из основных способов производства электроэнергии является преобразование механической энергии в электрическую, которое осуществляется генераторами постоянного и переменного тока
Генераторы постоянного тока (ГПТ) делят на два типа:
-с самовозбуждением (рис.1),
- с независимым возбуждением (рис.2).
Самовозбуждение в генераторах постоянного тока может быть осуществлено при параллельном (рис.1а), последовательном (рис.1б) и смешанном (рис.1в) соединении обмоток возбуждения с обмотками якоря.

а) б) в)
Рис.1.
Самовозбуждение генератора происходит при наличии трех условий:
1) остаточного магнитного потока, создающего ЭДС;
2) совпадения направления поля обмотки возбуждения с направлением остаточного магнитного потока;
3)сопротивление обмотки возбуждения меньше критического, т.е. когда ток возбуждения способен достигнуть значения, обеспечивающего заданную ЭДС.
Генератор с независимым возбуждением требует питания обмотки возбуждения отдельным независимым источником питания.

Рис. 2.
Уравнение ЭДС якоря генератора E = U + IaRa (1)
показывает связь между напряжением на выводах, падением напряжения в обмотке якоря и ЭДС якоря.
Ход работы:
1. Произвести расчет ГПТ с параллельным возбуждением рассчитанным на напряжение Uн и полезную мощность P2 . Сила тока в нагрузке Iн, в цепи якоря Iа, в обмотке возбуждения Iв. Сопротивление якоря Rа, обмотки возбуждения Rв. Генератор развивает ЭДС E. Электромагнитная мощность P1, суммарные потери ∑р при КПД ηг. Потери в якоре Pа, в обмотке возбуждения Pв.
2. Заполнить таблицу 1
Расчетные формулы и таблица 1 приведены ниже.
ηг = P2 ∕ P1; (2)
Eа = Uном + Iа Rа (3)
∑P = P1 - P2 ; (4)
Pэм = Eа Iа; (5)
P2 = Uн Iн; (6)
Pа = Iа2 Rа ; (7)
Pв = Iв2 Rв ; (8)
Iв = Uн ∕ Rв ; (9)
Iа = Iн + Iв; (10)
Iв= Pв ∕ Uн (11)
Таблица 1
| Вар
| P2
| Uном
| Iн
| Iв
| Iа
| Rа
| Rв
| Eа
| Pэм
| P1
| ∑P
| ηг
| Pа
| Pв
|
| №
| кВт
| В
| А
| А
| А
| Ом
| Ом
| В
| кВт
| кВт
| кВт
| -
| Вт
| Вт
|
|
|
|
|
|
|
| 0,15
|
|
|
|
|
| 0,9
|
|
|
|
| 20,7
|
|
|
|
| 0,18
|
|
|
|
| 2,8
|
|
|
|
|
|
|
|
| 2,9
|
|
| 40,3
|
|
| 2,6
|
|
|
|
|
|
| 11,8
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0,07
|
|
|
|
| 2,2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0,9
|
|
|
|
| 2,4
|
| 17,4
|
|
| 0,25
|
|
|
|
| 0,6
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2,8
|
|
|
|
|
| 21,6
|
|
|
|
|
|
|
|
|
|
| 0,9
|
|
|
Контрольные вопросы
1.Дать определение генератора.
2.Начертить схемы включения генераторов с самовозбуждением и независимым возбуждением. Какая из схем нашла наибольшее распространение и почему?
3.Перечислить условия необходимые для возникновения самовозбуждения ГПТ.
Практическая работа № 14
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Цель работы: изучить особенности расчета двигателей постоянного тока.
Подготовка к работе:
Основное достоинство двигателей постоянного тока заключается в возможности плавного регулирования частоты вращения и получения больших пусковых моментов, что очень важно для тяговых двигателей на электрическом транспорте, а также для привода различного технологического оборудования.
Электрические машины постоянного тока малой мощности применяются в системах автоматического регулирования, как для привода исполнительных механизмов, так и в качестве датчиков частоты вращения подвижных частей регулируемой системы.
Недостатком двигателей постоянного тока является необходимость предварительного преобразования для них электрической энергии цепи переменного тока в электрическую энергию цепи постоянного тока.
Так же как и в генераторах, обмотки возбуждения двигателя могут иметь последовательное, параллельное и смешанное согласное включение обмоток, а также независимое (от постороннего источника тока или постоянного магнита).
Двигатель с параллельным возбуждением (рис.1а). Благодаря обратимости, работа машины постоянного тока в режиме генератора с параллельным возбуждением может быть заменена на работу в режиме двигателя. Для этого достаточно сначала уменьшить до нуля вращающий момент первичного двигателя, а затем приложить к валу тормозной момент. При этом уменьшается частота вращения и ЭДС якоря, а направление тока в его обмотке изменится на обратное. Этот ток, взаимодействуя с магнитным полем машины, будет создавать вращающий электромагнитный момент.
Естественная механическая характеристика двигателя с параллельным возбуждением n (Мвр) изображается прямой линией (рис.2а), слегка наклоненной в сторону оси абсцисс. При изменении нагрузки на валу двигателя от холостого хода до номинальной частоты вращения большинства двигателей параллельного возбуждения уменьшается лишь на 3–8%. Таким образом, естественную механическую характеристику двигателей с параллельным возбуждением следует считать жесткой.
Регулировать частоту вращения двигателя можно при помощи реостата в цепи якоря. Однако такое регулирование неэкономично из-за значительной мощности потерь и применяется лишь для двигателей небольших мощностей.
Более совершенный метод регулирования частоты вращения изменением напряжения якоря.
У двигателя с последовательным возбуждением (рис.1б) ток якоря является вместе с тем током возбуждения Iа = Iв . Благодаря такому соединению главный магнитный поток машины изменяется пропорционально току якоря, пока магнитопровод машины не насыщен. Как и все двигатели постоянного тока, этот двигатель для ограничения пускового тока снабжается пусковым реостатом Rп.
Ценным свойством этого двигателя является способность выдерживать сильные перегрузки при умеренном увеличении тока.
Механическая характеристика двигателя, показанная на рис.2б при IВ1= Iа, называется естественной характеристикой. Естественная механическая характеристика двигателя мягкая, так как изменение момента сильно сказывается на частоте вращения двигателя.
Для регулирования частоты вращения можно шунтировать обмотку возбуждения реостатом с регулируемым сопротивлением Rр. Возможно регулирование двигателя путем изменения напряжения на якоре.
Высокая перегрузочная способность и мягкая характеристика двигателя с последовательным возбуждением особенно ценны для электрической тяги (трамвай, метрополитен, электрические железные дороги и т.д.). Эти двигатели подходят также для работы в качестве крановых двигателей там, где имеются источники постоянного тока.
Двигатель со смешанным возбуждением (рис.1в). Двигатель с параллельным возбуждением имеет жесткую механическую характеристику, а двигатель с последовательным возбуждением – мягкую характеристику. В ряде случаев желательна некоторая промежуточная форма характеристики. Простейший способ получения такой характеристики – применение смешанного возбуждения двигателя.
В двигателе с последовательно – параллельным возбуждением преобладает последовательное возбуждение, но благодаря наличию параллельной обмотки возбуждения нарастание частоты вращения двигателя при уменьшении нагрузки на валу ограничено (рис.2 в).
В двигателе с параллельно – последовательным возбуждением преобладает параллельное возбуждение. Наличие дополнительного последовательного возбуждения стабилизирует основной магнитный поток двигателя и немного смягчает его жесткую механическую характеристику.

а) б) в)
Рис.1.

а) б) в)
Рис.2.
Ход работы:
1. Произвести расчет ДПТ с параллельным возбуждением, который развивает полезную мощность на валу P2, потребляя из сети ток I при напряжении Uном. Ток в обмотке якоря Iа, в обмотке возбуждения Iв. Частота вращения якоря n2. Двигатель потребляет из сети мощность P1. Полезный вращающий момент двигателя М. В якоре двигателя наводится противо-ЭДС Е. Сопротивление обмотки якоря Rа, обмотки возбуждения Rв, а КПД двигателя ηд. Используя данные таблицы 1, определить значения величин, отмеченные знаком «?».
2. Заполнить таблицу 1
Расчетные формулы и таблица 1 приведены ниже.
P2 = P1 ηд; (1)
Ia = (Uном - E) ∕ Ra (2)
Iв = Uном ∕ Rв; (3)
Iа = I - Iв; (4)
P1= Uном I; (5)
М = 9550 Р2 ∕ n2 (6)
Таблица 1
| Вар
| P1
| P2
| Uном
| E
| I
| Iа
| Iв
| Rа
| Rв
| M
| n2
| ηд
|
| №
| кВт
| кВт
| В
| В
| А
| А
| А
| Ом
| Ом
| Н м
| об/мин
| |
|
| ?
|
| ?
|
|
| ?
|
| 0,28
|
| ?
|
| 0,8
|
|
|
| ?
|
|
|
| ?
|
| ?
|
| ?
|
| 0,85
|
|
| ?
|
|
| ?
| ?
|
| 2,2
| 0,13
|
|
| ?
| 0,85
|
|
| ?
| 8,5
| ?
|
| ?
| 21,3
|
| 0,94
|
| 95,5
| ?
| 0,85
|
|
| ?
| ?
| ?
| ?
| 36,4
|
|
| 0,28
|
| 19,1
|
| 0,8
|
|
| ?
|
|
| ?
| 81,8
| 79,6
| ?
| 0,13
|
|
|
| ?
|
|
|
| ?
|
|
| ?
|
|
| ?
|
| ?
|
| 0,85
|
|
|
| 3,2
| ?
| ?
|
| 35,4
|
| 0,28
|
| ?
|
| ?
|
|
| ?
| ?
|
|
| 23,3
| 21,3
|
| ?
|
| 95,5
|
| ?
|
|
| ?
| 3,2
|
|
| 36,4
| 35,4
|
| ?
|
| 19,1
| ?
| ?
|
Контрольные вопросы
1. Назовите преимущества и недостатки двигателей постоянного тока.
2. Начертить схемы включения двигателей с параллельным, последовательным и
смешанным возбуждением.
3. Назовите методы регулирования частоты вращения двигателей постоянного тока.
4. Начертите механические характеристики для каждого типа двигателей.
Практическая работа №15





