Принцип действия вакуумных захватов заключается в том, что в установленной на поверхности груза камере создается разрежение воздуха (вакуум), в связи с чем возникает сила взаимодействия (притяжения) между грузом и захватом. Особенности вакуумных грузозахватных устройств следующие:
- удобство и быстрота захвата и освобождения перегружаемых изделий, особенно крупногабаритных, у которых нет выступающих частей, необходимых для соприкосновения с обычными типами грузозахватов;
- жесткая связь с транспортируемым элементом, что позволяет легко изменить его положение в пространстве;
- сохранность поверхности изделий и конструкций, особенно шлифованных и полированных.
В среднем на 1 кг массы поднимаемого груза требуется 1,2…1,3 см2 рабочей площади захвата.
Виды вакуумных грузозахватных устройств:

Рис. 10 Схема классификации вакуумных грузозахватных устройств
В безнасосных грузозахватных устройствах вакуум создается одноразовым изменением объема полости вакуумной захватной камеры (ВЗК) под действием веса поднимаемого груза.
Гибкие тарельчатые ГУ характерны тем, что вакуум в них создается разрежением воздуха при деформации резиновой камеры.
Поршневые вакуумные грузозахватных устройства характерны тем, что вакуум в ВЗК создается за счет изменения объема, соединенного с ВЗК цилиндра при перемещении поршня в цилиндре или, наоборот, при перемещении самого цилиндра относительно поршня.
Диафрагменные вакуумные грузозахватных устройства близки но принципу действия поршневым ГУ, так как изменение объема ВЗК в них осуществляется перемещением эластичной диафрагмы. Применение диафрагмы вместо поршня значительно уменьшает попадание атмосферного воздуха в ВЗК.
Сильфонные вакуумные захваты с гофрированным складывающимся цилиндром по конструкции и принципу действия аналогичны диафрагменным.

Рис. 11 Вакуумные грузозахватные устройства
Все большее применение находят безнасосные захваты с переменным объемом полости вакуумной камеры, которые могут быть с ручным, механическим, пневматическим или гидравлическим приводом, а также самовакуумирующиеся (под действием груза). Основное их преимущество -простота конструкции благодаря отсутствию вакуумных насосов и независимость от источников энергии.
Эжекторные устройства конструктивно проще, чем насосные, однако из-за того, что в них невозможно получить достаточное разрежение, приходится применять ВЗК больших размеров. Для использования эжекторных устройств необходимо также подводить к вакуумному захвату шлангами сжатый воздух, что не всегда осуществимо, особенно, если грузы надо перемешать на значительное расстояние. Поэтому такие захваты в основном применяют в стационарных заводских условиях для транспортирования изделий небольшой массы с гладкой поверхностью.
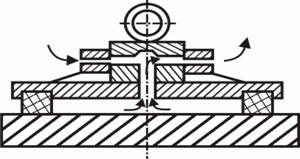
Рис. 12 Насосные вакуумные грузозахватные устройства
Вакуумные грузозахватные устройства с расположением насосного оборудования на одной раме с захватными камерами (автономные вакуумные ГУ) имеют гибкую связь с краном, причем насосное оборудование, приборы контроля и управления J объединяются с захватными камерами в единый автономный вакуум- захватный агрегат.
Автономные вакуум- захватные агрегаты могут применяться без каких-либо изменений на любом кране, имеющем соответствующую грузовую характеристику, и практически не требуют переоборудования и изменения его конструкции.

Рис. 13 Автономные вакуумные грузозахватные устройства
Управление автономным вакуумным грузозахватными устройствами производится вспомогательным персоналом (стропальщиком и др.) или крановщиком с пульта управления, расположенного в кабине крана.
Вакуумные грузозахватные устройства с расположением насосного и вспомогательного оборудования на раме рабочей машины (крана) могут иметь с машиной как гибкую, так и жесткую связь. Недостаток их — необходимость подводки гибких шлангов к вакуумным камерам. ГУ особенно эффективны, когда жестко закреплены на стреле, манипуляторе или другом рабочем органе подъемно-транспортной машины.
Траверса с вакуумными захватами для транспортирования листового материала выполнена в виде ножниц с плечами 2 и 3. Они могут плавно раздвигаться и сдвигаться на требуемый размер при помощи винтового устройства, приводимого электродвигателем через редуктор. Три вакуумных захвата I шарнирно прикреплены к траверсе. Управление осуществляется через выносной пульт 5 по гибкому кабелю 4.

Рис. 14 Траверса с вакуумными захватами для транспортирования листового материала
На рисунке показана вакуумная грузозахватная траверса, для которой предусмотрен поворот плоских грузов из горизонтального положения в вертикальное при помощи двух гидротолкателей. Основными узлами являются подвесное устройство, рама и захватная траверса. Вакуумные захваты подвешивают на пружинах в сферических подпятниках. Грузоподъемность ГУ — 3,2 т.

Рис. 15 Вакуумная грузозахватная траверса
Определение основных параметров
Сила притяжения между грузом и ВЗК
Р=Sд(ра-рв)
Где Sд- эффективная площадь ВЗК (площадь камеры, ограниченная ее внутренним контуром с учетом деформации после вакуумирования), м2; ра- атмосферное давление, Па; рв- предельное давление внутри ВЗК, Па.
При выборе расчетного значения давления ра в ВКЗ, необходимо учитывать, что давление воздуха по ее площади распределяется неравномерно и имеет наибольшее значение по периферии уплотнительного борта.






