Для сравнительной оценки решений различными методами применяют следующий подход. Вычисляют потенциальную энергию системы:
 , (9.1)
, (9.1)
Здесьпервое слагаемое – энергия деформации тела,  – работы внешних сил Р и F на перемещениях
– работы внешних сил Р и F на перемещениях  элементов, к которым приложены эти силы.
элементов, к которым приложены эти силы.
Если окажется, что одно решение дает П 1, а второе П 2, причем П 1> П 2, то скорее всего второе решение - более точное. Это утверждение основано на следующей теореме.
Теорема. Потенциальная энергия системы (9.1) принимает минимальное значение для истинных перемещений, деформаций и напряжений.
Для простоты доказательство приведем для простейшего случая одномерной задачи.
Пусть известно точное решение:
u = u точное,
тогда:
 . (9.2)
. (9.2)
Приближенное решение представим в виде:
u = u точное + Δ u.
Следовательно,

Учитывая (9.2), получим:
 .
.
В силу принципа возможных перемещений:
 .
.
В результате получаем:
 .
.
Здесь второе слагаемое в правой части - сугубо положительная величина. Таким образом, для точного решения  всегда меньше, чем потенциальная энергия
всегда меньше, чем потенциальная энергия  для приближенного решения.
для приближенного решения.
Примечание. При оценке прочности логично называть более близким к точному то решение, которое ближе по максимальным напряжениям, под которым понимается обычно эффективное напряжение  (его называют также эквивалентным или приведенным). Для плоской задачи, например, согласно четвертой теории прочности:
(его называют также эквивалентным или приведенным). Для плоской задачи, например, согласно четвертой теории прочности:
 .
.
Теорема не гарантирует того, что если П 1> П 2, то второе решение даст значение (sэфф)мах, которое будет ближе к точному.
Задача Фламана
Рассмотрим задачу воздействия погонной силы Р на полубесконечное упругое тело.
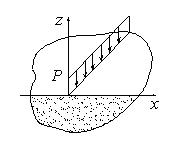
Рис.10.1
Это, например, расчетная схема давления на грунт ленточного фундамента.
Решение для этой задачи имеет вид:
 .
.
Проверяя уравнения равновесия (за исключением линии действия силы Р) для плоской задачи при qх = qz = 0, удостоверяемся, что оно удовлетворяется везде. Отметим также тот известный факт, что в линейной теории упругости решение единственно.
Проведем анализ решения.
При приближении к точкам приложения погонной силы P, (т.е. при  ) получаем, что
) получаем, что  .
.
Это означает, что вблизи точек приложения погонной силы P использовать решение для расчета на прочность бессмысленно. Однако как выяснится ниже, эти решения подобного типа можно использовать для определения поля напряжений при воздействии нагрузки, распределенной по площади.
Исследуем вопрос о том, как можно применить решение задачи Фламана в задаче о действии внешнего давления в плоской задаче. Для этого рассмотрим действие давления q (x) на полупространство (рис.10.2). То, что q не зависит от у означает, что оно не меняется в направлении Оу.
Найдем  . Возьмем площадку dξ на расстоянии ξ от начала координати перейдем от распределенной нагрузки к сосредоточенной силе dP= q dξ. Получаем задачу Фламана. Как известно, при переносе начала координат влево на расстояние ξ любая функция f записывается в виде:
. Возьмем площадку dξ на расстоянии ξ от начала координати перейдем от распределенной нагрузки к сосредоточенной силе dP= q dξ. Получаем задачу Фламана. Как известно, при переносе начала координат влево на расстояние ξ любая функция f записывается в виде:
f (х - ξ).
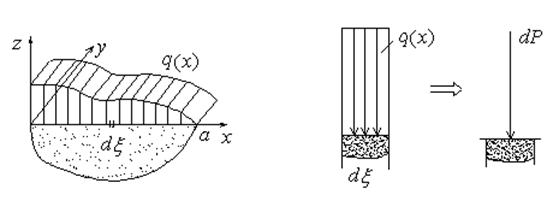
Рис.10.2 Рис.10.3
Тогда для силы dP решение можно записать в виде:
Такие же решения получим для других отрезков dξ, расположенных в других местах. Общее воздействие получим, суммируя напряжения от воздействия различных dP:
 Пример. Пусть q = const = q o, а = 1. Тогда интегрируя, получим
Пример. Пусть q = const = q o, а = 1. Тогда интегрируя, получим
 .
.
Аналогично можно найти  .
.
В этом случае бесконечных напряжений под нагрузкой не возникает (например, посередине при х =0.5 получим σх = 0.8183 q 0). Поэтому при расчете ленточных фундаментов вместо сосредоточенной силы необходимо задавать нагрузку q (х), близкую к реальному распределенному давлению на основание.





