

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Интересное:
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
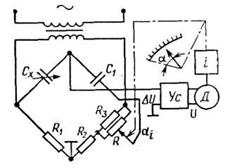
Возьмем в качестве примера преобразователь с самоуравновешивающимся емкостно-резистивным мостом (рис. 16.6). Преобразователь включает мостовую схему с емкостным датчиком Сх, усилитель Ус, двигатель Д, редуктор i и потенциометр обратной связи R. При изменении емкости Сх нарушается равновесие моста и на входе усилителя появляется сигнал  , который после усиления поступает на асинхронный двигатель Д, перемещающий через редуктор i щетку потенциометра R до восстановления равновесия моста.
, который после усиления поступает на асинхронный двигатель Д, перемещающий через редуктор i щетку потенциометра R до восстановления равновесия моста.
Взяв в качестве входного сигнала изменение емкости преобразователя  , а выходного — угол поворота щетки потенциометра
, а выходного — угол поворота щетки потенциометра  , пропорционального углу поворота стрелки прибора, получим передаточную функцию преобразователя
, пропорционального углу поворота стрелки прибора, получим передаточную функцию преобразователя
 |
 (16.29)
(16.29)
Рис. 16.6. Схема астатического преобразователя
Звено  , характеризующее изменение напряжения Ux полумоста, связанное с изменением емкости , имеет передаточную функцию
, характеризующее изменение напряжения Ux полумоста, связанное с изменением емкости , имеет передаточную функцию
 (16.30)
(16.30)
где  — чувствительность звена.
— чувствительность звена.
Аналогично определяется передаточная функция второго полумоста, входом которого является перемещение щетки по потенциометру R, а выходом напряжения Uу, т. е.
 (16.31)
(16.31)
где S 5 — чувствительность.
Передаточную функцию усилителя  возьмем в виде произведения чувствительности (коэффициента усиления) S 2 на форсирующее звено (1 +k2p), т. е.
возьмем в виде произведения чувствительности (коэффициента усиления) S 2 на форсирующее звено (1 +k2p), т. е.
 (16.32)
(16.32)
Передаточную функцию двигателя возьмем в виде
 , (16.33)
, (16.33)
где S 3 — коэффициент передачи; Т 3 — постоянная времени двигателя.
Передаточная функция редуктора представляет собой передаточное отношение i (i < 1)
 (16.34)
(16.34)
Пользуясь выражениями (16.30) — (16.34), приведем передаточную функцию преобразователя (16.29) к стандартному виду
 (16.35)
(16.35)
где  ;
;  ;
;  .
.
По передаточной функции (16.35) можно построить переходную функцию и частотную характеристику преобразователя.
|
|
ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ
В качестве примера расчета возьмем струнный преобразователь, в котором измеряемой величиной может быть сила F или ускорение a = F/M,где М — масса ЧЭ акселерометра. Рассматривая преобразователь входного ускорения a (t)в изменение частоты автоколебаний f, зададим, следующие величины: диапазон измерения  ; относительную девиацию выходного сигнала
; относительную девиацию выходного сигнала  ; нижнюю частоту автоколебаний f H. Здесь приняты обозначения: а Ви а Н — верхнее и нижнее значение измеряемой величины; f В — верхняя частота автоколебаний.
; нижнюю частоту автоколебаний f H. Здесь приняты обозначения: а Ви а Н — верхнее и нижнее значение измеряемой величины; f В — верхняя частота автоколебаний.
Статическую характеристику преобразователя (14.37) перепишем в виде
 , (16.44)
, (16.44)
где  .
.
(16.46)
Поскольку статическая характеристика (16.44) нелинейна, то целесообразно оценить степень нелинейности посредством соотношения
 . (16.47)
. (16.47)
Передаточная функция струнного преобразователя W (p)равна произведению передаточных функций акселерометра W a(p),струны W С(p)и автогенератора W A(p)(рис. 16.9), т. е.
 . (16.50)
. (16.50)
 (16.51)
(16.51)
где  ,
,
С ПР — жесткость плоской пружины акселерометра,  — осевая жесткость струны;
— осевая жесткость струны;  — коэффициент демпфирования.
— коэффициент демпфирования.
Следовательно, передаточная функция преобразователя с учетом (14.38) будет
 , (16.53)
, (16.53)
где  — чувствительность струнного преобразователя.
— чувствительность струнного преобразователя.
ДИНАМИЧЕСКИЕ СВОЙСТВА ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Общий вид модели измерительного преобразователя представлен на рис. 35. Внешняя переменная сила F(t) действует на массу m, связанную с неподвижным телом А упругим элементом (например пружиной W). В преобразователях такого вида могут быть погрешности двух типов: амплитудная и фазовая.

Рис. 35. Физическая модель измерительного преобразователя:
F(f) — внешняя переменная сила; Р — демпфер (успокоитель)
Амплитудная погрешность. Если к массе т приложена переменная сила F(t), то при ее воздействии амплитуда колебаний массы т оказывается больше по сравнению с амплитудой перемещения ее при единичном воздействии силы. Амплитудная погрешность вынужденных колебаний — отклонение наибольшей амплитуды колебаний в динамическом режиме (вынужденные колебания) к амплитуде перемещения подвижной части при единичном воздействии силы:
|
|

При синусоидальном колебании подвижной части амплитудная погрешность
где  — отношение угловой частоты вынужденных колебаний к частоте
— отношение угловой частоты вынужденных колебаний к частоте  собственных колебаний подвижной части;
собственных колебаний подвижной части;  — степень успокоения подвижной части;
— степень успокоения подвижной части;  — коэффициент успокоения при критическом режиме движения массы, т. е. при наименьшем времени успокоения.
— коэффициент успокоения при критическом режиме движения массы, т. е. при наименьшем времени успокоения.
При малых значениях  максимальная амплитудная погрешность имеет место при
максимальная амплитудная погрешность имеет место при  , т. е. при резонансе (
, т. е. при резонансе ( ). Поэтому преобразователи перемещений и сил, работающие в динамическом режиме, должны иметь много меньше единицы, т.е. должны иметь собственную частоту больше частоты измеряемого процесса
). Поэтому преобразователи перемещений и сил, работающие в динамическом режиме, должны иметь много меньше единицы, т.е. должны иметь собственную частоту больше частоты измеряемого процесса  .
.
Если собственная частота преобразователя будет меньше частоты измеряемого процесса , деталь (масса т) может выходить из соприкосновения с силой f измерения будут неверные. Амплитудная погрешность  зависит также от степени успокоения подвижной части преобразователя и имеет наименьшее значение при = 0,6...0,7.
зависит также от степени успокоения подвижной части преобразователя и имеет наименьшее значение при = 0,6...0,7.
Фазовая погрешность. Фазовая погрешность преобразователей выражается в запаздывании вынужденных колебаний подвижной части от колебаний измеряемой величины. При = 0,7 изменение фазовой погрешности имеет почти линейную зависимость от  , а
, а  меньше при малом . Фазовую погрешность можно вычислить по формуле
меньше при малом . Фазовую погрешность можно вычислить по формуле

Таким образом, при измерении переменных во времени механических величин во избежание больших амплитудных и фазовых погрешностей важно так подобрать параметры преобразователя, чтобы обеспечить соответствующее соотношение частоты собственных колебаний преобразователя и частоты измеряемого процесса (вынужденных колебаний), а также степень успокоения подвижной части преобразователя =0,6...0,7.
Погрешности системы преобразования. Основная погрешность прибора, состоящего из цепи измерительных преобразователей, складывается главным образом из двух составляющих:
• инструментальной погрешности, обусловленной погрешностями элементов, входящих в каждое звено (например, погрешность подгонки сопротивлений, трение в подвижных частях механизма, недостаточная тщательность исполнения деталей звена);
|
|
• погрешности из-за недостаточной чувствительности усилителя и индикаторов.
Каждое из звеньев цепи вносит свою долю в результирующую основную погрешность прибора, причем при прямом преобразовании все звенья равноценны по степени влияния на общую погрешность. Поэтому стремятся всегда уменьшить число звеньев цепи преобразования.
Точность измерения неэлектрической величины зависит также и от ряда дополнительных факторов, которые также необходимо учитывать. К ним относятся изменения напряжения, частоты и формы кривой напряжения питания, а также окружающей температуры, влажности и вибрации.
Влияние дополнительных факторов можно оценить чувствительностью каждого звена к тому или иному фактору, т. е. отношением изменения выходной величины преобразователя данного звена к изменению дополнительного фактора.
Дополнительные факторы вызывают дополнительную составляющую погрешности нуля и чувствительности прибора. Для уменьшения дополнительных погрешностей прибегают к стабилизации напряжения и частоты источников питания, к различным приемам коррекции этих погрешностей и особенно заботятся о стабильности во времени физических свойств и параметров элементов прибора.
Кроме того, при анализе погрешностей сложных измерительных устройств, состоящих из целого ряда самостоятельных звеньев, не всегда можно строго разграничить погрешности на систематические и случайные.
При анализе и выборе метода и суммирования погрешностей сложных измерительных устройств следует делить погрешности не на систематические и случайные, а по признаку их сильной или слабой взаимной корреляционной связи. Если ряд погрешностей одного или нескольких преобразователей вызывается одной общей причиной, в результате чего они оказываются сильно связанными между собой, то эти погрешности будут распределены по одному и тому же закону, а форма результирующего закона распределения будет также соответствовать этому закону. Поэтому внутри каждой из этих групп погрешности должны складываться алгебраически с учетом их знака.
Результирующие погрешности, полученные после суммирования в каждой из групп, уже не имеют между собой сильных корреляционных связей и должны рассматриваться как независимые и, следовательно, должны складываться геометрически.
|
|
6. Основы проектирования.
6.1. Общие вопросы проектирования изделий точного приборостроения.
|
|
|

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!