Проверку целостности обмоток электродвигателей с фазным ротором можно производить с помощью переносных измерительных приборов - омметров и мегаомметров. Омметром измеряется омическое сопротивление обмоток и сравнивается с паспортными данными электродвигателя. Мегаомметром проверяется целостность обмоток и изоляция относительно друг друга. Необходимо перед началом измерений отключить электродвигатель от питающей сети, выполнив организационные и технические мероприятия; проверить исправность приборов измерения.
Измерения мегаомметром в процессе эксплуатации разрешается
выполнять обученным работникам из числа электротехнического
персонала. В электроустановках выше 1000 В измерения производятся
по наряду, в электроустановках до 1000 В - по распоряжению. Измерять
сопротивление изоляции мегаомметром может работник, имеющий
группу III. При работе с мегаомметром прикасаться к токоведущим
частям, к которым он присоединен, не разрешается. После окончания
работы следует снять с токоведущих частей остаточный заряд путем их
кратковременного заземления.
При измерениях необходимо помнить, что напряжение, подключенное к одной из обмоток ротора или статора, наводится в других, не подсоединенных к источнику питания, обмотках.
Понятие о двухзонном регулировании скорости вращения электродвигателей постоянного тока.
Из уравнения частоты вращения электродвигателя постоянного тока

вытекает, что возможны три принципиально различных способа jрегулирования скорости вращения двигателя:
• регулирование изменением тока возбуждения двигателя;
• регулирование изменением сопротивления в цепи якоря;
• регулирование изменением подводимого к якорю напряжения.
В курсе электропривода имеется понятие о двухзонном регулировании скорости вращения. Данное регулирование хорошо обеспечивается или системой тиристорный преобразователь-двигатель, или системой генератор-двигатель.
К первой зоне относится регулирование путем подводимого к -•орю электродвигателя напряжения, дающее изменение скорости вращения вниз от номинальной до нуля.
Ко второй зоне относится регулирование путем изменения тока возбуждения двигателя, дающее изменение скорости вверх от номинальной скорости до максимально разрешенной для данного типа двигателя.
Оба эти способа описаны в билете № 4, вопрос 2, стр. 22.
Двухзонное регулирование экономически целесообразно использовать при регулировании в первой зоне при постоянном моменте на валу двигателя, а при регулировании во второй зоне при постоянной мощности на валу двигателя. Для расширения диапазона регулирования, автоматического поддержания скорости вращения, тока нагрузки и напряжения якоря используются системы с обратными связями по току, скорости, напряжению с обязательной настройкой их предельно допустимых величин.
Регулирование скорости вращения электродвигателя переменного тока с фазным ротором.
Введение сопротивления в цепь ротора позволяет регулировать скорость вращения двигателя. Плавность регулирования зависит от числа ступеней включаемого сопротивления. Регулирование осуществляется вниз от основной (номинальной) скорости, причем лучшее использование двигателя осуществляется при регулировании с постоянным моментом. На холостом ходу регулирование скорости практически не заметно. Жесткость характеристик (рис. 58) значительно уменьшается по мере снижения скорости, что ограничивает диапазон регулирования до 2:1.
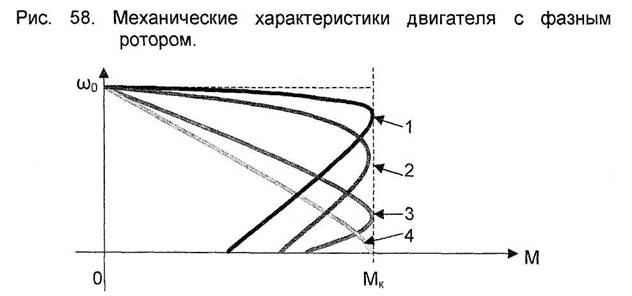
1 - Естественная характеристика при номинальных параметрах, Rp=0.
2 - Искусственная характеристика Rp1<Rp2.
3 - Искусственная характеристика Rp2<RP3
4 - Искусственная характеристика при Rp3 - max допустимое.
Недостатком способа регулирования путем введения сопротивления в цепь ротора являются большие потери энергии на сопротивлениях и в роторе. Не допускается длительная работа двигателей с включенными в цепь ротора сопротивлениями. Большое применение такому способу регулирования нашло на подъемно-транспортных механизмах и на приводе волочильных станов в момент заправочной скорости.
Система генератор-двигатель, ее устройство и назначение.
Для получения плавного регулирования скорости вращения двигателя постоянного тока в широких пределах применяется схема, приведенная на рис. 59, называемая системой генератор-двигатель (Г-Д). В этой схеме генератор питает двигатель, приводящий в движение рабочий механизм.
Якорь генератора (G) соединяется с якорем двигателя (М2) непосредственно без пусковых или регулировочных реостатов в цепи якорей. Обмотки возбуждения генератора и двигателя питаются от отдельного возбудителя (GE). Генератор и возбудитель вращаются с постоянной скоростью двигателем (Ml) переменного тока (гонный двигатель) - синхронным или асинхронным.
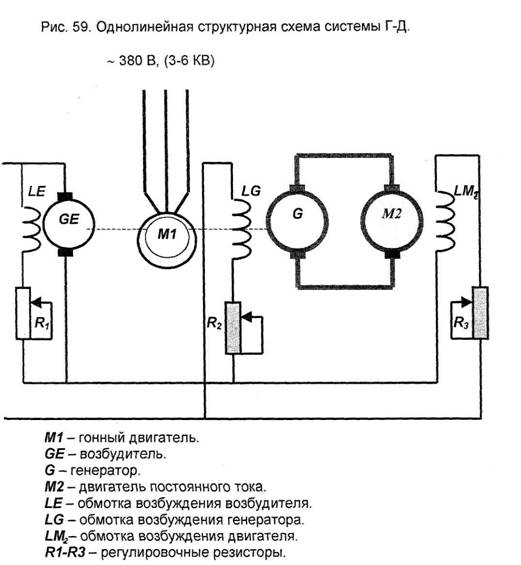
В этой схеме изменение напряжения на щетках генератора можно получить изменением его тока возбуждения (R2). Если необходимо реверсирование двигателя, то оно осуществляется изменением полярности обмотки возбуждения генератора, что приводит к изменению полярности на щетках генератора и двигателя, и как следствие, изменение направления вращения двигателя.
Основным достоинством этой схемы является возможность просто регулировать скорость двигателя в широких пределах. Предел 
 регулирования 10:1 достигается путем изменения напряжения генератора. Пределы регулирования могут быть увеличены за счет изменения тока возбуждения двигателя в среднем в отношении 2:1. Таким образом, общие пределы регулирования достигают значений 20:1. Преимущества:
регулирования 10:1 достигается путем изменения напряжения генератора. Пределы регулирования могут быть увеличены за счет изменения тока возбуждения двигателя в среднем в отношении 2:1. Таким образом, общие пределы регулирования достигают значений 20:1. Преимущества:
• плавность регулирования;
• большой предел регулирования;
• достаточная жесткость характеристик;
• надежность в эксплуатации.
Недостатки:
• необходимость в двукратном преобразовании энергии (из электрической энергии переменного тока в механическую и из механической энергии вновь в электрическую постоянного тока);
• наличие трех машин в системе, суммарная мощность которых в 3 раза больше установленной мощности регулируемого двигателя;
• значительные габариты, необходимость в фундаментах под машины;
• высокие капитальные и эксплуатационные расходы.






