Современная робототехника возникла на основе синтеза механики и кибернетики и дала толчок новому направлению их развития. Для механики это оказалось связано с многозвенными механизмами типа манипуляторов, а для кибернетики – интеллектуальным управлением, которое требуется для роботов последнего поколения с искусственным интеллектом.
Таким образом, задача робототехники состоит в развитии и применении промышленных роботов и основанных на их использовании гибких производственных систем (ГПС) и робототехнических комплексов (РТК) различного технологического назначения. Роль роботов в таких системах и комплексах может быть различной – от основной, когда роботы осуществляют главные функции (выполняют основные технологические операции) до вспомогательной, когда роботы обслуживают какое-либо оборудование.
Все роботы по назначению делятся на следующие большие группы.
1. Промышленные роботы. Они служат для автоматизации производственных процессов, когда выполняют конкретные технологические операции, как вспомогательные, так и основные. Среди них механообработка, загрузка заготовок на станки и прессы, сварка, нанесение различных покрытий, сборка изделий, обслуживание автоматизированных складов, транспортирование деталей и многое другое. Об этом подробно будет говориться в следующих разделах пособия.
2. Бытовые роботы. Они используются в сфере обслуживания.
3. Роботы для научных целей. Они используются под водой, в космосе, в трудных и опасных условиях на земле. Цель их применения – получение необходимой информации об объекте исследования.
4. Боевые роботы (роботы для разминирования). Они призваны заменить человека на поле боевых действий и в других экстремальных условиях. Относятся к спецтехнике, которая не является предметом изучения для настоящего пособия.
5. Спасательные роботы (например, роботы-пожарные) здесь также не рассматриваются.
Необходимо отметить, что в последующих разделах пособия все внимание уделено именно промышленным роботам, как неотъемлемой составляющей процесса автоматизации современного производства, в области дерево- и металлообработки. Будет рассмотрен порядок выбора модели робота, методика проектирования и расчета захватных устройств, правила проверки роботов по точностным параметрам работы, особенности их эксплуатации и соблюдения правил техники безопасности и другие вопросы.
Дадим определение промышленного робота. Следует отметить, что в разных источниках технической информации (включая зарубежные), дается несколько различных определений, что является следствием не совсем устоявшейся терминологии в области робототехники.
ГОСТ 25686-85 «Манипуляторы, автооператоры и промышленные роботы. Термины и определения» дает следующее определение.
Промышленный робот – автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для перемещения объектов в пространстве и для выполнения различных производственных процессов.
Промышленный робот (industrial robotr)– это автономно функционирующая машина, которая служит для воспроизведения некоторых двигательных функций человека при выполнении вспомогательных и основных производственных операций без его непосредственного участия человека и наделенная для этого некоторыми способностями человека, а так же способностью к обучению для работы в комплексе с другим оборудованием и приспособленная к производственной среде.
И еще вариант определения.
Промышленный робот – это автоматическая машина, стационарного или передвижного исполнения, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности и перепрограммируемого устройства, программного управления для выполнения в производственном процессе двигательных и управляющих функций.
Можно отметить близость по своему содержанию всех приведенных определений, подтверждающих то, что в составе промышленного робота всегда присутствует механическая часть и система управления этой механической частью, которая в свою очередь получает сигналы от сенсорной части (различного рода датчиков).
Манипулятор (manipulator) – устройство, предназначенное для имитации двигательных и рабочих функций руки человека. Метод управления может быть биотехническим (ручным), интерактивным (смешанным) и автоматическим. К манипуляторам с ручным управлением относятся т.н. копирующие манипуляторы, телеоператоры и т.п.
Первыми появились манипуляторы с биотехническим управлением, которые были предназначены для работы с объектами, непосредственный контакт с которыми для человека вреден или опасен (радиоактивные вещества, раскаленные болванки и т. п.).
Манипулятор иначе – это совокупность пространственного рычажного механизма и системы приводов, осуществляющая под управлением программируемого автоматического устройства или человека-оператора действия (манипуляции), аналогичные действиям руки человека. Это управляемое устройство, машина, которая служит для выполнения двигательных функций, аналогичных функциям руки человека, при перемещении груза в пространстве, оснащенная для этого рабочим органом, в том числе захватным устройством.
Манипуляторы делят на:
· автоматически действующие, которые имеют систему управления, обеспечивающую перемещение по всем координатам, что делает промышленный робот многофункциональной машиной, т.е. он соответствует требованиям гибкого переналаживаемого производства;
· с ручным управлением, которые управляются оператором либо непосредственно за счет перемещения рабочего органа (нашли широкое применение в деревообработке для массивных грузов)
Структурная схема манипулятора включает следующие элементы:
а) задающий орган (система управления), который предназначен для создания управляющих сигналов и движений;
б) исполнительный орган (ИО или «рука»)– функциональная часть манипулятора, которая предназначенная для совершения действий по отработке управляющих сигналов системы управления;
в) связующий орган (трансмиссия) – предназначен для связи основных частей промышленного робота;
г) рабочий орган – часть ИО, предназначенная для реализации технологического назначения. Может представлять из себя захватное устройство, специальных инструмент в соответствии с операцией, выполняемой данным роботом и т. п.
Иными словами: рабочий орган – это составная часть промышленного робота, служащая для непосредственного выполнения технологических операций. Захватное устройство – конечный узел манипулятора, обеспечивающий захватывание и удержание в определённом положении объекта манипулирования.
Объект манипулирования – тело, перемещаемое в пространстве манипулятором (предметы обработки в виде обрабатываемых деталей из того или иного материала, рабочий инструмент, захватное устройство (ЗУ) (схват) той или иной конструкции и т. п.).
Подводя итог вышесказанному, полезно привести конструктивную схему современного промышленного робота, изображенную на рис. 1.3.
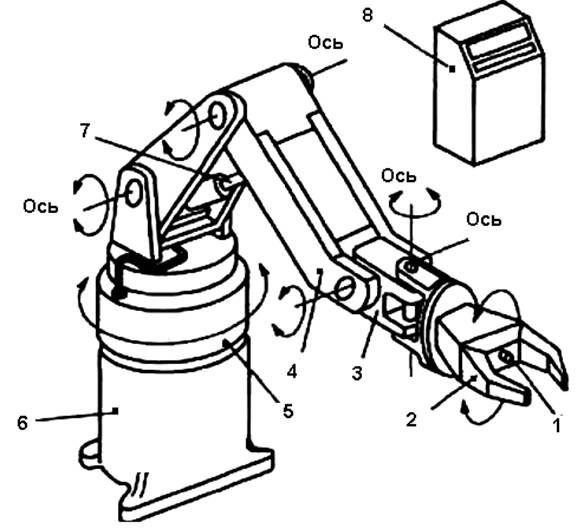
1 – датчик обратной связи; 2 – захватное устройство; 3 –; 4 – «рука» манипулятора; 5 – колонна; 6 – основание; 7 – привод «руки»; 8 – управляющее устройство с пультом набора программ
Рис. 1.3. Конструкция промышленного робота с шестью степенями подвижности
Автооператор (autooperator) – неперепрограмируемый автоматически действующий манипулятор.
Интерактивный робот – робот, который может управляться как оператором, так и автоматически. Для этого он специально снабжается блоком памяти, который обеспечивает режим «обучения» роботом.
В свою очередь различают автоматизированные интерактивные ПР обеспечивающие переход от ручного (биотехнического) управления к автоматическому режиму и супервизорное, когда все части заданного цикла операций выполняются ПР автоматически поэтапно, но только после подачи необходимой целеуказательной команды.
Возможны два варианта режима работы промышленного робота: режим программирования (режим обучения), при котором в запоминающее устройство вводится управляющая программа, и режим выполнения технологических операций (режим работы).
Как уже отмечалось, промышленный робот состоит из двух обязательных составных частей: манипулятора и системы программного управления. Последняя осуществляет управление роботом в строгом соответствии с управляющей программой.
Устройство управления ПР необходимо для формирования и выдачи управляющих воздействий или сигналов манипулятору в соответствии с управляющей программой и конструктивно состоит из собственно системы управления, информационно-измерительной системы с устройствами обратной связи и системы связи. Несущие конструкции служат для размещения всех устройств и агрегатов робота, а также для обеспечения необходимой прочности и жесткости самого манипулятора.
Существует несколько разновидностей управления роботами.
1. Программное управление. Ему соответствует наиболее простой тип системы управления, который используется для управления манипуляторами на промышленных объектах. В таких роботах отсутствует сенсорная часть, все действия жёстко фиксированы и регулярно повторяются.
Для программирования таких роботов могут применяться среды программирования типа VxWorks/Eclipse или языки программирования например Forth, Оберон, Компонентный Паскаль, язык Си и др.
В качестве аппаратного обеспечения обычно используются промышленные компьютеры в мобильном исполнении PC/104 реже MicroPC. Такое управление также может происходить с помощью персонального компьютера (ПК) или программируемого логического контроллера.
2. Адаптивное управление. При таком методе управления роботы с адаптивной системой управления оснащаются развитой сенсорной частью. Сигналы, передаваемые датчиками, анализируются и, в зависимости от результатов, принимается решение о дальнейших действиях, переходе к следующей стадии действий и т. д.
Контролируемым параметром может стать, например, масса переносимой роботом детали, фактический размер детали после ее обработки, наличие детали в захватном устройстве, наличие и расположение препятствия в рабочей зоне и многое другое. Как правило, датчики располагаются в захватном устройстве или на кисти промышленного робота.
3. Управление, основанное на возможностях искусственного интеллекта. Такое управление относится к, так называемым, роботам 3-го поколения и в настоящее время активно развивается и совершенствуется. Оно позволяет роботу действовать в неопределенной и постоянно изменяющейся производственной обстановке, например, захватывать неориентированные детали, в том числе, движущиеся по конвейеру и производить сборку сложных изделий и т. п.
Всему этому во многом способствует широкое использование систем технического зрения (СТЗ). Системы распознавания образов уже способны определять простые трехмерные предметы, их ориентацию и композицию в пространстве, а также могут достраивать недостающие части, пользуясь информацией из своей базы данных.
4. Управление человеком (например, дистанционное управление). Его примеры были рассмотрены в разделе 1 данного пособия. Для промышленных роботов, занятых непосредственно в производстве, оно мало характерно.
Касаясь основных принципов управления промышленными роботами, можно сказать, что современные роботы функционируют на основе принципов обратной связи, подчинённого управления, а также иерархичности системы управления.
Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения манипулятора, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов.
Подчинённое управление предназначено для построения системы управления приводами. Если необходимо построить систему управления приводом по положению (например, по углу поворота звена манипулятора), то система управления замыкается обратной связью по положению, а внутри самой системы управления по положению функционирует система управления по скорости со своей обратной связью по скорости, внутри которой существует контур управления по току со своей обратной связью.
Современный робот оснащён не только обратными связями по положению, скорости и ускорениям звеньев. При захвате деталей робот должен знать, удачно ли он захватил деталь. Если деталь хрупкая или её поверхность имеет высокую степень чистоты, строятся сложные системы с обратной связью по усилию, позволяющие роботу производить захват, не разрушая деталь и не повреждая её поверхность.
Информационно-измерительная система предназначенная для сбора и первичной обработки информации для системы управления, включает в себя управляющее устройство, устройство сравнения сигналов и датчики обратной связи. Систему связи используют для обеспечения обмена информацией между роботом и оператором или другими роботами и технологическими устройствами с целью формулировки заданий, контроля за функционированием систем робота и технологического оборудования, диагностики неисправностей, регламентной проверки и т.п.
Система программного управления. Она предназначена для формирования и выдачи управляющих воздействий исполнительным механизмам в соответствии с управляющей программой. В зависимости от конструктивного исполнения и функциональных возможностей выделяют следующие системы управления промышленных роботов:
· механические системы, в основе которых лежит использование различных копиров, кулачков и т. п. простейших программоносителей;
· цикловые системы, использующие центральное управляющее устройство, в виде командоаппарата или штекерной панели с шаговым искателем;
· числовое программное управление.
В любую систему управления обязательно входят устройства программирования, сохранения программ, их воспроизведения и отработки. Система программного управления содержит: пульт управления, с помощью которого оператор осуществляет ввод и контроль задания; запоминающее устройство, в котором хранится вся необходимая информация, включая программы работ; вычислительное устройство, реализующее алгоритм управления манипулятором; блок управления приводами (БУП) механизмов манипулятора.
Программа – это полное и точное описание на некотором формальном языке процесса обработки информации, приводящего к решению поставленных задач. Для промышленных роботов это набор данных о последовательности движений, о направлении, скорости перемещений и о величине хода по каждой из управляемых координат. Программа может записываться на специальных носителях следующих типов:
· механические аналоги (копиры);
· коммутирующие устройства (например, штекерные панели), которые имеют недостаток – ненадежные электромеханические контакты;
· быстросменные носители (перфокарты, перфоленты, магнитные ленты и диски, а также оптические диски).
При использовании различных носителей процесс ввода программ осуществляется следующими устройствами:
· контактными,
· бесконтактными;
· магнитными накопителями.
Программирование – это подготовка задачи управления для ее решения и ввод информации, содержащейся в управляющей программе в систему программного управления.
Для промышленных роботов применяют 3 вида программирования:
Обучение робота. Заключается в прохождении с помощью пульта всех опорных точек траектории робота, в задании определенных скоростей и в последовательном запоминании элементов траектории. Этот вид прост в использовании и не требует наладчиков высокой квалификации.
Расчет управляющей программы. Метод является аналитическим, требует достаточно много времени, т.к. все координаты точек рассчитываются отдельно и наносятся на программоноситель. В этом случае требуются инженеры-программисты высокой квалификации.
Режим самообучения. Система управления робота самостоятельно составляет план действий в зависимости от изменяющейся производственной обстановки. Для таких систем характерна высокая сложность и стоимость. В настоящее время такие системы широкого применения в промышленности пока не нашли.
Перепрограмируемость – это свойство промышленного робота заменять управляющую программу автоматически или с помощью человека, т.е. изменять степень перемещения по всем степеням свободы и управляющей функции с помощью средств управления.
Под перепрограммируемыми устройствами понимают такие, которые обеспечивают изменение последовательности и (или) значений перемещений по координатным осям и управляющих функций на пульте управления. Это изменение управляющей программы может быть выполнено автоматически или при помощи оператора.
Объем памяти – наибольшее количество единиц информации, которое может храниться в запоминающем устройстве системы управления робота. Так для систем числового программного управления объем памяти определяется количеством цифровых кодов (слов) или двоичных знаков. Для систем циклового управления – это максимальное количество управляющих команд (отдельных движений).
К общим вопросам следует отнести степень соответствия промышленного робота человеку по целому ряду характерных для них свойств. Также необходимо рассмотреть область использования промышленных роботов и наметить их преимущества.
В этом плане полезно привести диаграмму (рис. 1.4), где показаны сравнительные характеристики (свойства) промышленного робота и человека, занятых в сфере производства.
Робот на диаграмме изображен трехмерной фигурой – параллелограммом в системе координат ОXYZ. При этом по осям отложено:
OX – физические возможности или силовые характеристики,
OY – функциональные возможности или способность производить определенный набор целенаправленных действий,
OZ – уровень интеллекта в виде способности к принятию решений, выбор нужного варианта действий и даже анализ окружающей обстановки.
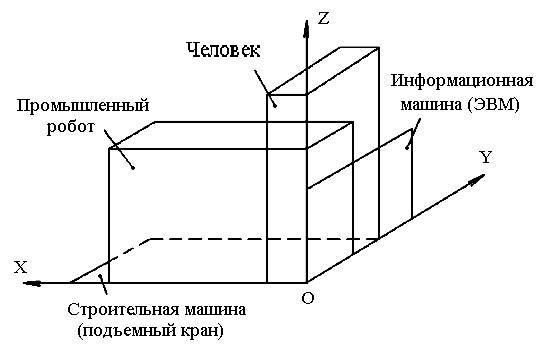
Рис. 1.4. Диаграмма к определению свойств промышленных роботов
На рисунке по осям обозначено:
X – уровень физических возможностей (силовая характеристика);
Y – уровень функциональных возможностей (разнообразие);
Z – уровень интеллекта.
Из диаграммы следует, что ПР является наиболее универсальной машиной, в отличие от ЭВМ, которая не обладает физическими способностями, а так же от устройств типа подъемный кран, у которых нет интеллекта. Промышленный робот ближе других машин к человеку.
Созданный для замены человека промышленный робот часто сравнивается с человеком. Такое сравнение допустимо, прежде всего, для конструкций, манипулятор которых сравним по кинематике с рукой человека.
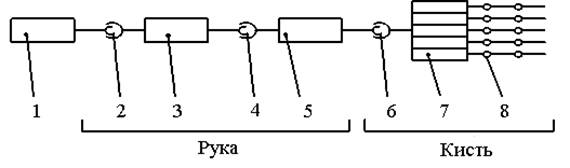
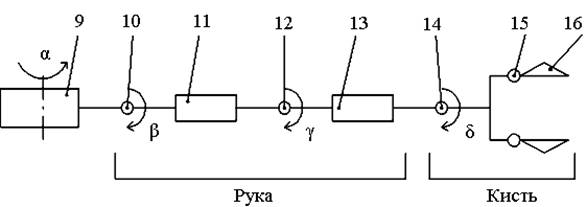
Далее на рис. 1.5 показаны сравнительные схемы кинематики руки человека и ИО робота.
 а
а
|
 б
б
|
1 – туловище; 2 – плечевой сустав; 3 – плечо; 4 – локтевой сустав; 5 – предплечье; 6 – запястье; 7– ладонь; 8 – пальцы; 9 – основание манипулятора; 10, 12, 14, 15 – шарниры; 11, 13 – предплечье; 16 – пальцы схвата
Рис. 1.5. Сравнительная схема: а – кинематика устройства руки человека; б – структурная схема «руки» робота, копирующей руку человека
Как видно из приведенного рисунка, сходство объектов весьма и весьма велико. Это говорит, в частности, о копировании конструкторами- разработчиками механической части промышленных роботов устройства руки человека, являющейся продуктом длительной направленной природной эволюции.
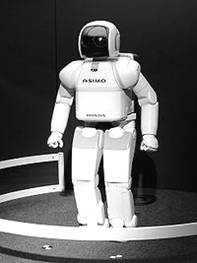
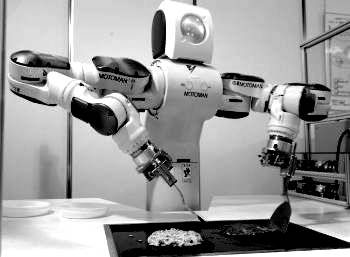
Далее на рис. 1.6. приведены еще два примера роботов различного назначения.
 а
а
|  б
б
|
Рис. 1.6. Роботы различного назначения: а – робот научного назначения; б – робот-андроид ASIMO, производства фирмы Honda
Среди наиболее распространённых действий, совершаемых промышленными роботами, можно назвать следующие:
· выполнение основных технологических операций в деревообработке и металлообработке;
· лесозаготовки и получение заготовок различными методами;
· перемещение деталей и заготовок от станка к станку или от станка к системам сменных паллет (приспособлений-спутников), т. е. функция транспортирования;
· автоматизация транспортирования с адресацией грузов в пределах участка и межцеховое транспортирование;
· сварка непрерывных швов и точечная сварка;
· покраска;
· выполнение операций резанья с движением инструмента по сложной формообразующей траектории.
· нанесение герметиков, клеев, лакокрасочных и др. покрытий;
· контроль и сортировка продукции;
· обслуживание автоматизированных складов.
Достоинства использования применения промышленных роботов:
· достаточно быстрая окупаемость;
· исключение влияния человеческого фактора на конвейерных автоматизированных производствах, а также при проведении монотонных работ, требующих высокой точности;
· повышение точности выполнения технологических операций и, как следствие, повышение качества;
· возможность использования оборудования в три смены, 365 дней в году, т. е. повышение коэффициента использования оборудования.
Использование роботов позволяет облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при рутинной работе, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях.
Эффективность применения промышленных роботов также состоит:
· в создании гибких производственных систем различного уровня сложности. В серийном производстве продукции роботы вместе с технологическим оборудованием позволяют автоматизировать производство в условиях частой смены выпускаемой продукции;
· в повышении производительности обработки и сборки, а так же в высвобождение значительной части рабочих;
· в повышении качества и однородности выпускаемой продукции, которое достигается за счет применения постоянной программы робота, исключения ошибок рабочих и автоматизации контроля;
· в сокращении роли ручного труда и замена человека на наиболее трудоемких и вредных операциях;
· в создании основ комплексной автоматизации производства;
· в снижении потребности в рабочей силе и удешевлении производства.
Гибкие автоматизированные производства, создаваемые на базе промышленных роботов, позволяют решать задачи комплексной автоматизации на предприятиях с широкой номенклатурой продукции при мелкосерийном и даже единичном производстве.
Промышленные роботы предназначены для замены человека при выполнении основных и вспомогательных технологических операций в процессе промышленного производства.
При этом решается важная социальная задача - освобождения человека от работ, связанных с опасностями для здоровья или с тяжелым физическим трудом, а также от простых монотонных операций, не требующих высокой квалификации.
Примеры конструкций роботов и манипуляторов
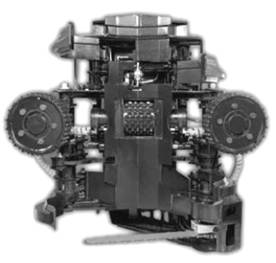
Конструктивное исполнение указанных видов технологического оборудования весьма разнообразно и зависит от тех функций, которые оно выполняет. Кроме того, для манипуляторов характерна более упрощенная, чем у роботов, конструкция в виду отсутствия у них системы автоматического управления, датчиков, сенсоров и т. п. составляющих частей.
Это видно на рис. 1.7. и 1.8., где показаны манипуляторы, используемые на лесозаготовках.
Разнообразие конструкций роботов отвечает классификации, которая производится по достаточно большому числу классификационных признаков. Например, по характеру выполняемых операций промышленные роботы можно подразделить на три группы:

а

б
Рис. 1.7. Общий вид манипулятора LOGLIFT 51F, применяемого на лесозаготовках: а – на этапе захвата бревна с земли; б – то же при погрузке
а) производственные, или технологические, выполняющие основные операции технологических процессов. Уместно напомнить, что при механической обработке детали, к основным операциям относятся такие, которые приводят к изменению размеров, формы и состояния поверхностей обрабатываемых деталей;

Рис. 1.8. Манипулятор LOGLIFT 61F во время спиливания ствола
б) подъемно-транспортные, или вспомогательные, выполняющие действия типа «взять – перенести – положить» при осуществлении ими так называемых вспомогательных операций. Сюда можно отнести роботы, обслуживающие автоматизированные склады;
в) универсальные для различных действий, как основных и вспомогательных.
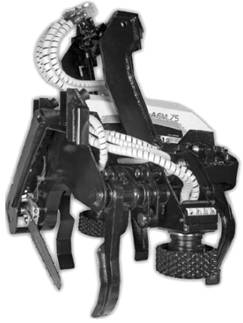
На рис. 1.9. показан рабочий орган манипулятора аналогичного назначения, имеющего расширенные технологические возможности. Он имеет механизм подачи бревна с подающими роликами, пилу для мерной распиловки, а также механизм очистки дерева от коры.
Еще два примера роботов, являющихся достаточно новыми разработками, не относящихся к понятию «промышленный робот», даны на рис. 1.10. а. и б. Надеемся, что последний вариант исполнения и назначения робота не потребует каких-либо пояснений.
 а а
|
 б б
|
Рис. 1.9. Рабочий орган манипулятора AFM 75: а – общий вид; б – вид сбоку
а б
Рис. 1.10. Примеры роботов: а – боевой робот; б – робот-повар
Боевым роботом (боевая система наблюдения и разведки) принято называть некое автоматическое устройство, (заменяющее человека в боевых ситуациях или при работе в условиях, несовместимых с возможностями человека (условия природных катастроф, террористических акций), а также в военных целях: разведка, боевые действия, разминирование и т. п.
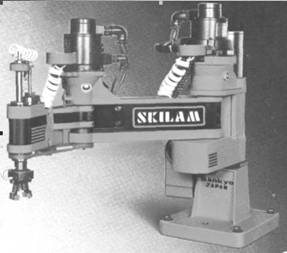
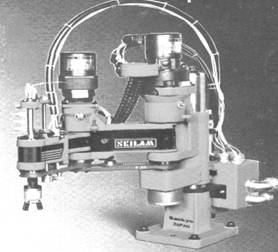
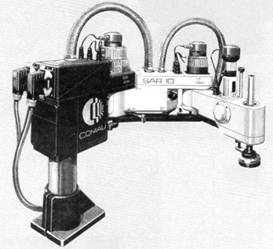
Приведем в качестве иллюстрации (рис. 1.11., 1.12. и 1.13.) некоторые разновидности современных промышленных роботов различного целевого назначения и конструктивного исполнения.
Рис. 1.11. Некоторые модели промышленных роботов, использующих ангулярную систему управляемых координат: а – робот модели SKILAM SR-3; б – робот модели SR-4; в – робот Adept; г – робот SAR-10
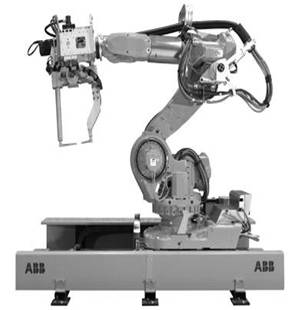
Рис. 1.12. Модели промышленных роботов различного технологического назначения: а – робот ROBEL J модели RJ65 для непрерывной дуговой сварки; б – стационарный робот для операций точечной сварки (имеет сварочные клещи в виде рабочего инструмента); в – подвесной робот портального типа; г – напольный универсальный робот модели СМАРТ 10-25
Рис. 1.13. Семейство промышленных роботов фирмы KUKA (Германия): а; б; в; г – варианты моделей различного конструктивного исполнения
В последнее время все большее развитие получают роботы бытового назначения, основной задачей которых является выполнение самых разнообразных операций по дому, чем они оказывают помощь человеку.
Однако, учитывая то, что объектом настоящего пособия являются промышленные роботы, средства их технологического оснащения и особенности применение в конкретных условиях, далее остановимся более подробно на их конструктивном исполнении, классификации и порядке выбора модели.
По специализации промышленные роботы подразделяют на специальные, выполняющие строго определенные технологические операции или обслуживающие конкретные модели технологического оборудования; специализированные, предназначенные для выполнения технологических операций одного вида (механической обработки, сварки, сборки, окраски, нанесения различных покрытий, склеивания и т. п.) или для обслуживания определенной группы моделей технологического оборудования, объединенных общностью манипуляционных действий; универсальные (многоцелевые), ориентированные на работу с различными видами технологического оборудования.




 а
а
 б
б
 в
в
 г
г
 а
а
 б
б
 в
в
 г
г
 а
а
 б
б
 в
в
 г
г



