

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
Топ:
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Интересное:
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Центр тяжести. Методы нахождения центров тяжести (симметричные тела, отрицательные объемы). Центры тяжести простейших фигур.
Центром тяжести тела называется геометрическая точка, жестко связанная с этим телом, и являющаяся центром параллельных сил тяжести, приложенных к отдельным элементарным частицам тела.
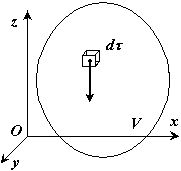 Координаты центра тяжести неоднородного твердого тела в выбранной системе отсчета определяются следующим образом:
Координаты центра тяжести неоднородного твердого тела в выбранной системе отсчета определяются следующим образом: 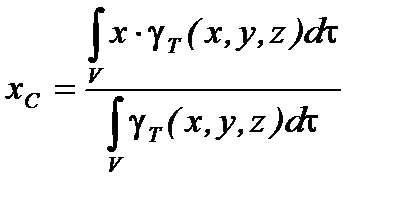
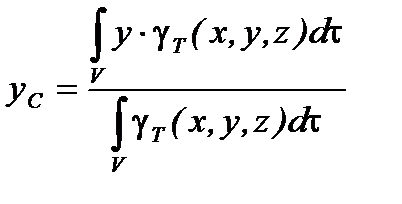
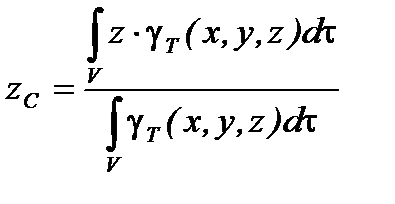 где
где  - вес единицы объема тела (удельный вес)
- вес единицы объема тела (удельный вес)  - Вес всего тела. Для однородного твердого тела
- Вес всего тела. Для однородного твердого тела  и формулы получают вид:
и формулы получают вид: 
 - Объем всего тела.Если твердое тело представляет собой неоднородную поверхность,то координаты центра тяжести в выбранной системе отсчета определяются следующим образом:
- Объем всего тела.Если твердое тело представляет собой неоднородную поверхность,то координаты центра тяжести в выбранной системе отсчета определяются следующим образом:
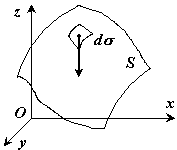
где  - вес единицы площади тела,
- вес единицы площади тела,
 - Вес всего тела. Для однородной поверхности
- Вес всего тела. Для однородной поверхности  и формулы получают вид:
и формулы получают вид: 
 - Площадь поверхности.Если твердое тело представляет собой неоднородную линию,то координаты центра тяжести в выбранной системе отсчета определяются следующим образом:
- Площадь поверхности.Если твердое тело представляет собой неоднородную линию,то координаты центра тяжести в выбранной системе отсчета определяются следующим образом:
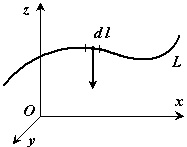
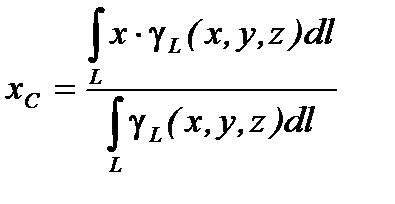
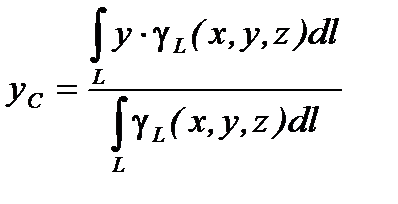
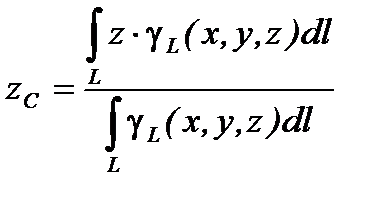 где
где  - вес единицы длины тела,
- вес единицы длины тела,  - Вес всего тела. Для однородной линии
- Вес всего тела. Для однородной линии  и формулы получают вид:
и формулы получают вид: 
 - Длина линии.
- Длина линии.
Прямолинейное движение материальной точки.
Дифференциальное уравнение прямолинейного движения точки вдоль оси Оx имеет вид:  , Начальные условия
, Начальные условия  ,
,  . Наиболее важные случаи.1. Сила постоянна.
. Наиболее важные случаи.1. Сила постоянна.  ,
,  ,
,  . Имеем равнопеременное движение (движение с постоянным ускорением) 2. Сила зависит от времени.
. Имеем равнопеременное движение (движение с постоянным ускорением) 2. Сила зависит от времени.  ,
,  ,
,  ,
,  . 3. Сила зависит от координаты или скорости. Силу, зависящую от координаты х
. 3. Сила зависит от координаты или скорости. Силу, зависящую от координаты х  , создают упругие тела при их деформации (например, сжатая или растянутая пружина). . Сила, зависящая от скорости движения
, создают упругие тела при их деформации (например, сжатая или растянутая пружина). . Сила, зависящая от скорости движения  , это сила сопротивления (воздуха, воды и т.д.)
, это сила сопротивления (воздуха, воды и т.д.)
|
|
Свободные колебания материальной точки.
Теорема об изменении количества движения материальной системы.
 – количество движения материальной точки,
– количество движения материальной точки,  – элементарный импульс силы.
– элементарный импульс силы.  – элементарное изменение количества движения материальной точки равно элементарному импульсу силы, приложенной к этой точке (теорема в дифференц-ной форме) или
– элементарное изменение количества движения материальной точки равно элементарному импульсу силы, приложенной к этой точке (теорема в дифференц-ной форме) или  – производная по времени от количества движения материальной точки равна равнодействующей сил, приложенных к этой точке. Проинтегрируем:
– производная по времени от количества движения материальной точки равна равнодействующей сил, приложенных к этой точке. Проинтегрируем:  – изменение количества движения материальной точки за конечный промежуток времени равно элементарному импульсу силы, приложенной к этой точке, за тот же промежуток времени.
– изменение количества движения материальной точки за конечный промежуток времени равно элементарному импульсу силы, приложенной к этой точке, за тот же промежуток времени.  – импульс силы за промежуток времени [0,t]. В проекциях на оси координат:
– импульс силы за промежуток времени [0,t]. В проекциях на оси координат:  и т.д.
и т.д.
Теорема Эйлера.
Найдём число координат, определяющих положение абсолютно твёрдого тела. Определить положение тела => определить координаты  точки относительно некоторой системы отсчёта в момент времени.
точки относительно некоторой системы отсчёта в момент времени. 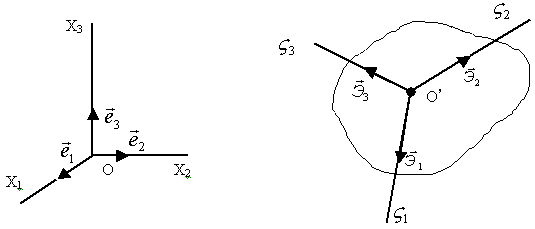 Пусть Х1, Х2, Х3 – неподвижные оси (рис. 38); орты:
Пусть Х1, Х2, Х3 – неподвижные оси (рис. 38); орты:  [декартова система].
[декартова система].
 ,
,  ,
,  , - оси, жёстко связанные с телом; орты:
, - оси, жёстко связанные с телом; орты:  ,
,  ,
,  - [декартова система]. Так как координаты точек относительно собственных осей
- [декартова система]. Так как координаты точек относительно собственных осей  , , не зависят от времени, то задача сводится к определению положения координатных осей, жёстко связанных с телом (подвижных), относительно неподвижных осей Х1, Х2, Х3. Составим таблицу косинусов углов между осями Х и
, , не зависят от времени, то задача сводится к определению положения координатных осей, жёстко связанных с телом (подвижных), относительно неподвижных осей Х1, Х2, Х3. Составим таблицу косинусов углов между осями Х и  :
: 
 - скалярное произведение. Так как системы координат ортогональны, то скалярное произведение:
- скалярное произведение. Так как системы координат ортогональны, то скалярное произведение:  , где
, где 
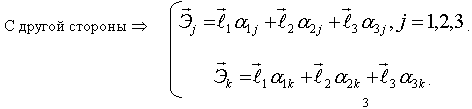
 Итак:
Итак:  . Число таких соотношений = 6 (Из 9 – ти в силу симметрии по jи k). Имеем 6 соотношений для 9 косинусов => 3 косинуса
. Число таких соотношений = 6 (Из 9 – ти в силу симметрии по jи k). Имеем 6 соотношений для 9 косинусов => 3 косинуса  , не расположенные в одном столбце, или в одной строке, могут быть приняты за независимые, а остальные можем определить из составленных 6 – ти
, не расположенные в одном столбце, или в одной строке, могут быть приняты за независимые, а остальные можем определить из составленных 6 – ти  соотношений.
соотношений.
Кроме того => три координаты определяют положение точки О’ – начало системы , , .
Но 9 координат и 3 соотношение длин:  . это условия постоянства расстояний между точками в абсолютно твёрдом теле.Выведем формулу Эйлера для распределения скоростей точек абсолютно твёрдого тела.
. это условия постоянства расстояний между точками в абсолютно твёрдом теле.Выведем формулу Эйлера для распределения скоростей точек абсолютно твёрдого тела.  , 1)
, 1)  ,
,
|
|
 - скорость точки О’,
- скорость точки О’,  - скорость точки Q во вращательном движении тела (так как длина постоянна). Так как координаты
- скорость точки Q во вращательном движении тела (так как длина постоянна). Так как координаты  точки Qпостоянны, то
точки Qпостоянны, то  . Тогда: 2)
. Тогда: 2)  ,
,
где  . Скорость точки Q:
. Скорость точки Q:  . 3) Выразим
. 3) Выразим  и производные через направляющие косинусы
и производные через направляющие косинусы  :
:  . Тогда:
. Тогда:  (в неподвижной системе). 4) Проекция
(в неподвижной системе). 4) Проекция  на ось
на ось  (k= 1,2,3):
(k= 1,2,3):  . Скорости точек во вращательном движении – линейные функции координат точек. 5) Получим более простую и наглядную форму закона распределения скоростей, используя свойства функции
. Скорости точек во вращательном движении – линейные функции координат точек. 5) Получим более простую и наглядную форму закона распределения скоростей, используя свойства функции  .
.  , Дифференцируем по t:
, Дифференцируем по t:  . По свойству производной от произведения: при j= k =>,
. По свойству производной от произведения: при j= k =>,  при j≠ k=>.
при j≠ k=>.  Свойства:а) симметрия по kи j; б) при j= k=>равенство «0»; в) размерность t-1, т. е. угловая скорость (угол в радианах), так как
Свойства:а) симметрия по kи j; б) при j= k=>равенство «0»; в) размерность t-1, т. е. угловая скорость (угол в радианах), так как  - скорость.
- скорость.
 Покажем, что
Покажем, что
Действительно:  ,
,  - по аналогии. Итак:
- по аналогии. Итак:  или: 7)
или: 7) 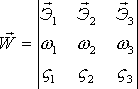 , где
, где  - единичные вектора, жёстко связанные с телом. Положим
- единичные вектора, жёстко связанные с телом. Положим  - вектор, где
- вектор, где  ,
,  ,
,  ,
,  ,8) Тогда:
,8) Тогда: 
 -Описывает распределение скоростей. Назовём вектором мгновенной угловой скорости, а прямая на которой он располагается, в рассматриваемый момент времени, проходящую через точку О’ – осью мгновенного вращения, или мгновенной осью. Таким образом, закон распределения скоростей точек абсолютно твёрдого тела в любом движении:
-Описывает распределение скоростей. Назовём вектором мгновенной угловой скорости, а прямая на которой он располагается, в рассматриваемый момент времени, проходящую через точку О’ – осью мгновенного вращения, или мгновенной осью. Таким образом, закон распределения скоростей точек абсолютно твёрдого тела в любом движении:  .
.
20.Теорема о движении центра масс.
В ряде случаев для определения характера движения системы (особенно твердого тела), достаточно знать закон движения ее центра масс. Чтобы найти этот закон, обратимся к уравнениям движения системы и сложим почленно их левые и правые части. Тогда получим:  . Преобразуем левую часть равенства. Из формулы для радиус-вектора центра масс имеем:
. Преобразуем левую часть равенства. Из формулы для радиус-вектора центра масс имеем:  . Беря от обеих частей этого равенства вторую производную по времени и замечая, что производная от суммы равна сумме производных, найдем:
. Беря от обеих частей этого равенства вторую производную по времени и замечая, что производная от суммы равна сумме производных, найдем:  или
или  , где -
, где -  ускорение центра масс системы. Так как по свойству внутренних сил системы
ускорение центра масс системы. Так как по свойству внутренних сил системы  , то, подставляя все найденные значения, получим окончательно:
, то, подставляя все найденные значения, получим окончательно:  . Уравнение и выражает теорему о движении центра масс системы: произведение массы системы на ускорение ее центра масс равно геометрической сумме всех действующих на систему внешних сил. Сравнивая с уравнением движения материальной точки, получаем другое выражение теоремы: центр масс системы движется как материальная точка, масса которой равна массе всей системы и к которой приложены все внешние силы, действующие на систему. Проектируя обе части равенства на координатные оси, получим:
. Уравнение и выражает теорему о движении центра масс системы: произведение массы системы на ускорение ее центра масс равно геометрической сумме всех действующих на систему внешних сил. Сравнивая с уравнением движения материальной точки, получаем другое выражение теоремы: центр масс системы движется как материальная точка, масса которой равна массе всей системы и к которой приложены все внешние силы, действующие на систему. Проектируя обе части равенства на координатные оси, получим: 
 . Эти уравнения представляют собою дифференциальные уравнения движения центра масс в проекциях на оси декартовой системы координат. Значение доказанной теоремы состоит в следующем. 1) Теорема дает обоснование методам динамики точки. Из уравнений видно, что решения, которые мы получаем, рассматривая данное тело как материальную точку, определяют закон движения центра масс этого тела, т. е. имеют вполне конкретный смысл. В частности, если тело движется поступательно, то его движение полностью определяется движением центра масс. Таким образом, поступательно движущееся тело можно всегда рассматривать как материальную точку с массой, равной массе тела. В остальных случаях тело можно рассматривать как материальную точку лишь тогда, когда практически для определения положения тела достаточно знать положение его центра масс. 2) Теорема позволяет при определении закона движения центра масс любой системы исключать из рассмотрения все наперед неизвестные внутренние силы. В этом состоит ее практическая ценность.
. Эти уравнения представляют собою дифференциальные уравнения движения центра масс в проекциях на оси декартовой системы координат. Значение доказанной теоремы состоит в следующем. 1) Теорема дает обоснование методам динамики точки. Из уравнений видно, что решения, которые мы получаем, рассматривая данное тело как материальную точку, определяют закон движения центра масс этого тела, т. е. имеют вполне конкретный смысл. В частности, если тело движется поступательно, то его движение полностью определяется движением центра масс. Таким образом, поступательно движущееся тело можно всегда рассматривать как материальную точку с массой, равной массе тела. В остальных случаях тело можно рассматривать как материальную точку лишь тогда, когда практически для определения положения тела достаточно знать положение его центра масс. 2) Теорема позволяет при определении закона движения центра масс любой системы исключать из рассмотрения все наперед неизвестные внутренние силы. В этом состоит ее практическая ценность.
|
|
Работа и мощность.
Элементарная работа dA = Ftds, Ft – проекция силы на касательную к траектории, направленная в сторону перемещения, или dA = Fdscosa. Если a – острый, то dA>0, тупой – <0, a=90o: dA=0. dA=  – скалярное произведение вектора силы на вектор элементарного перемещения точки ее приложения; dA= Fxdx+Fydy+Fzdz – аналитическое выражение элементарной работы силы. Работа силы на любом конечном перемещении М0М1:
– скалярное произведение вектора силы на вектор элементарного перемещения точки ее приложения; dA= Fxdx+Fydy+Fzdz – аналитическое выражение элементарной работы силы. Работа силы на любом конечном перемещении М0М1:  . Если сила постоянна, то
. Если сила постоянна, то  = F×s×cosa. Единицы работы:[1 Дж (джоуль) = 1 Нм].
= F×s×cosa. Единицы работы:[1 Дж (джоуль) = 1 Нм].  , т.к. dx=
, т.к. dx=  dt и т.д., то.
dt и т.д., то. 
Теорема о работе силы: Работа равнодействующей силы равна алгебраической сумме работ составляющих сил на том же перемещении А=А1+А2+…+Аn. Работа силы тяжести:  , >0, если начальная точка выше конечной. Работа силы упругости:
, >0, если начальная точка выше конечной. Работа силы упругости:  –работа силы упругости равна половине произведения коэффициента жесткости на разность квадратов начального и конечного удлинений (или сжатий) пружины. Работа силы трения: если сила трения const, то
–работа силы упругости равна половине произведения коэффициента жесткости на разность квадратов начального и конечного удлинений (или сжатий) пружины. Работа силы трения: если сила трения const, то  - всегда отрицательна, Fтр=fN, f – коэфф.трения, N – нормальная реакция поверхности.
- всегда отрицательна, Fтр=fN, f – коэфф.трения, N – нормальная реакция поверхности.
|
|
Работа силы тяготения. Сила притяжения (тяготения):  , из mg=
, из mg=  , находим коэфф. k=gR2.
, находим коэфф. k=gR2.  – не зависит от траектории. Мощность – величина, определяющая работу в единицу времени,
– не зависит от траектории. Мощность – величина, определяющая работу в единицу времени,  . Если изменение работы происходит равномерно, то мощность постоянна: N=A/t. [1 Вт (ватт) =1 Дж/с, 1 кВт (киловатт) =1000 Вт, 1л.с.(лошадиная сила) = 75 кгс×м/с = 736 Вт].
. Если изменение работы происходит равномерно, то мощность постоянна: N=A/t. [1 Вт (ватт) =1 Дж/с, 1 кВт (киловатт) =1000 Вт, 1л.с.(лошадиная сила) = 75 кгс×м/с = 736 Вт].
Относительное движение. Абсолютная скорость и абсолютное ускорение.
6 .Плоское движение твердого тела. Определение скорости и ускорения при плоском движении. (Формулы, по которым рассчитывать). Мгновенный центр скоростей. Мгновенный центр ускорений. Плоскопараллельное движение твердого тела – движение при котором каждая точка тела движется в плоскости параллельной некоторой неподвижной плоскости. Сечение тела одной из таких плоскостей есть плоская фигура, остающаяся в этой плоскости при движении тела. Функции  называются уравнениями плоского движения твердого тела. Для характеристики вращательной части плоского движения твердого тела вокруг подвижной оси, проходящей через выбранный полюс, вводится понятие угловой скорости
называются уравнениями плоского движения твердого тела. Для характеристики вращательной части плоского движения твердого тела вокруг подвижной оси, проходящей через выбранный полюс, вводится понятие угловой скорости  и углового ускорения
и углового ускорения  .
.  и
и  , где
, где  - единичный вектор, направленный по оси вращения. Если угол поворота вокруг подвижной оси, проходящей через полюс, обозначить
- единичный вектор, направленный по оси вращения. Если угол поворота вокруг подвижной оси, проходящей через полюс, обозначить  , то
, то  , а
, а  . Векторы и можно изображать в любых точках подвижной оси вращения, т.е. они являются свободными векторами.
. Векторы и можно изображать в любых точках подвижной оси вращения, т.е. они являются свободными векторами.  . Мгновенным центром скоростей называется точка плоской фигуры, скорость которой в данный момент времени равна нулю. Теорема. В каждый момент времени при плоском движении фигуры в ее плоскости при
. Мгновенным центром скоростей называется точка плоской фигуры, скорость которой в данный момент времени равна нулю. Теорема. В каждый момент времени при плоском движении фигуры в ее плоскости при  (непоступательное движение), имеется один единственный центр скоростей. Мгновенный центр скоростей это единственная точка плоской фигуры для данного момента времени. В другой момент времени мгновенным центром скоростей будет уже другая точка.
(непоступательное движение), имеется один единственный центр скоростей. Мгновенный центр скоростей это единственная точка плоской фигуры для данного момента времени. В другой момент времени мгновенным центром скоростей будет уже другая точка.  . Скорости точек плоской фигуры определяются в данный момент так, как если бы движение фигуры было вращением вокруг мгновенного центра скоростей. Скорости точек плоской фигуры пропорциональны их расстояниям до мгновенного центра скоростей. Мгновенный центр ускорений– точка (Q) плоской фигуры, ускорение которой в данный момент времени равно нулю. Для его построения из точки А откладываем под углом
. Скорости точек плоской фигуры определяются в данный момент так, как если бы движение фигуры было вращением вокруг мгновенного центра скоростей. Скорости точек плоской фигуры пропорциональны их расстояниям до мгновенного центра скоростей. Мгновенный центр ускорений– точка (Q) плоской фигуры, ускорение которой в данный момент времени равно нулю. Для его построения из точки А откладываем под углом  к ускорению аА отрезок
к ускорению аА отрезок  , при этом угол откладывается от ускорения в сторону, направления углового ускорения e. Модули ускорений точек плоской фигуры пропорциональны расстояниям от этих точек до мгн.ц. ускорений, а векторы ускорений составляют с отрезками, соединяющими эти точки и м.ц.у. один и тот же угол :
, при этом угол откладывается от ускорения в сторону, направления углового ускорения e. Модули ускорений точек плоской фигуры пропорциональны расстояниям от этих точек до мгн.ц. ускорений, а векторы ускорений составляют с отрезками, соединяющими эти точки и м.ц.у. один и тот же угол :  . Мгновенный центр скоростей Р и мгновенный центр ускорений Q являются различными точками плоской фигуры.
. Мгновенный центр скоростей Р и мгновенный центр ускорений Q являются различными точками плоской фигуры.
|
|
 7.Статика. Определение силы, момента. Аксиомы статики. Активные силы и реакции связей (их направление). Статикой называется раздел механики, в котором излагается общее учение о силах и изучается условия равновесия материальных тел, находящихся под действием сил. Величина, являющаяся количественной мерой механического взаимодействия материальных тел, называется в механике силой. Сила является величиной векторной. Ее действие на тело определяется: 1) численной величиной или модулем силы, 2) направлением силы, 3) точкой приложения силы. Моментом силы относительно центра называется величина, равная взятому с соответствующим знаком произведению модуля силы на длину плеча. Аксиомы статики.Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F1 = F2) и направлены вдоль одной прямой в противоположные стороны. Аксиома 2. Действие данной системы, сил на абсолютно твердое тело не изменится, если к ней прибавить или о т нее отнять уравновешенную систему сил. Эта аксиома устанавливает, что две системы сил, отличающиеся на уравновешенную систему, эквивалентны друг другу. Следствие из 1-й и 2-й аксиом. Действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела. Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующею, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах. Вектор, равный диагонали параллелограмма, построенного на векторах и, называется геометрической суммой векторов и: = +. Следовательно, аксиому 3 можно еще формулировать так: две силы, приложенные к телу в одной точке, имеют равнодействующую, равную геометрической (векторной) сумме этих сил и приложенную в той же точке. Аксиома 4. При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие. Закон о равенстве действия и противодействия является одним из основных законов механики. Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым).Сила, с которой связь действует на рассматриваемое тело, называется реакцией связи. Реакция связи направлена в сторону, противоположную той, куда связь не дает перемещаться телу. Силы, не являющиеся реакциями связей, например сила тяжести, будем называть активными. Всякое несвободное тело можно рассматривать как свободное, если действие связей заменить их реакциями, приложенными к телу. Основные типы связей: а) опора на идеально гладкую поверхность – реакция поверхности направлена по нормали к ней; б) одна из соприкасающихся поверхностей является точкой (угол), реакция направлена по нормали к другой поверхности; в) нить – реакция направлена вдоль нити к точке подвеса; г) цилиндрический шарнир (шарнирно-неподвижная опора) – реакция может иметь любое направление в плоскости. При решении задач заменяется двумя взаимно перпендикулярными составляющими; д) цилиндрическая шарнирно-подвижная опора (шарнир на катках) – реакция направлена перпендикулярно опорной плоскости; е) сферический (шаровой) шарнир – реакция может иметь любое направление в пространстве. При решении задач заменяется тремя взаимно перпендикулярными составляющими; ж) невесомый стержень (обязательно невесомый) – реакция направлена вдоль стержня; з) "глухая" заделка (вмурованная балка) – возникает произвольно направленная реакция – сила и реактивный момент, также неизвестный по направлению.
7.Статика. Определение силы, момента. Аксиомы статики. Активные силы и реакции связей (их направление). Статикой называется раздел механики, в котором излагается общее учение о силах и изучается условия равновесия материальных тел, находящихся под действием сил. Величина, являющаяся количественной мерой механического взаимодействия материальных тел, называется в механике силой. Сила является величиной векторной. Ее действие на тело определяется: 1) численной величиной или модулем силы, 2) направлением силы, 3) точкой приложения силы. Моментом силы относительно центра называется величина, равная взятому с соответствующим знаком произведению модуля силы на длину плеча. Аксиомы статики.Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F1 = F2) и направлены вдоль одной прямой в противоположные стороны. Аксиома 2. Действие данной системы, сил на абсолютно твердое тело не изменится, если к ней прибавить или о т нее отнять уравновешенную систему сил. Эта аксиома устанавливает, что две системы сил, отличающиеся на уравновешенную систему, эквивалентны друг другу. Следствие из 1-й и 2-й аксиом. Действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела. Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующею, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах. Вектор, равный диагонали параллелограмма, построенного на векторах и, называется геометрической суммой векторов и: = +. Следовательно, аксиому 3 можно еще формулировать так: две силы, приложенные к телу в одной точке, имеют равнодействующую, равную геометрической (векторной) сумме этих сил и приложенную в той же точке. Аксиома 4. При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие. Закон о равенстве действия и противодействия является одним из основных законов механики. Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым).Сила, с которой связь действует на рассматриваемое тело, называется реакцией связи. Реакция связи направлена в сторону, противоположную той, куда связь не дает перемещаться телу. Силы, не являющиеся реакциями связей, например сила тяжести, будем называть активными. Всякое несвободное тело можно рассматривать как свободное, если действие связей заменить их реакциями, приложенными к телу. Основные типы связей: а) опора на идеально гладкую поверхность – реакция поверхности направлена по нормали к ней; б) одна из соприкасающихся поверхностей является точкой (угол), реакция направлена по нормали к другой поверхности; в) нить – реакция направлена вдоль нити к точке подвеса; г) цилиндрический шарнир (шарнирно-неподвижная опора) – реакция может иметь любое направление в плоскости. При решении задач заменяется двумя взаимно перпендикулярными составляющими; д) цилиндрическая шарнирно-подвижная опора (шарнир на катках) – реакция направлена перпендикулярно опорной плоскости; е) сферический (шаровой) шарнир – реакция может иметь любое направление в пространстве. При решении задач заменяется тремя взаимно перпендикулярными составляющими; ж) невесомый стержень (обязательно невесомый) – реакция направлена вдоль стержня; з) "глухая" заделка (вмурованная балка) – возникает произвольно направленная реакция – сила и реактивный момент, также неизвестный по направлению.
8. Система сходящихся сил Сходящимися называются силы, линии действия которых пересекаются в одной точке. Равнодействующая сходящихся сил равна геометрической сумме этих сил и приложена в точке их пересечения  . Равнодействующая может быть найдена геометрич. способом – построением силового (векторного) многоугольника или аналитич. способом, проектируя силы на оси координат. Проекции силы на оси координат (для плоской сист.): Fx=F×cosa; Fy=F×cosb=F×sina; проекция >0, если направление составляющей силы совпадает с направл. оси. Модуль силы:
. Равнодействующая может быть найдена геометрич. способом – построением силового (векторного) многоугольника или аналитич. способом, проектируя силы на оси координат. Проекции силы на оси координат (для плоской сист.): Fx=F×cosa; Fy=F×cosb=F×sina; проекция >0, если направление составляющей силы совпадает с направл. оси. Модуль силы: 
 ; направляющие косинусы:
; направляющие косинусы:  разложение силы на составляющие:
разложение силы на составляющие:  , где
, где  – орт (единичный вектор) соответствующей оси.
– орт (единичный вектор) соответствующей оси.
 Для пространственной системы:
Для пространственной системы:  ,
,
Fx=Fcosa; Fy=Fcosb; Fz=Fcosg;  ;
;  .
.
Проекции равнодействующей системы сходящихся сил на координатные оси равна алгебраическим суммам проекций этих сил на соответствующие оси: Rx=åFix; Ry=åFiy; Rz=åFiz;  .
.
9.Плоская система сил. Условия равновесия. Плоская система сил – система сил, расположенных в одной плоскости. Система сил приводится к одной силе – главному вектору и к паре сил, момент которой равен главному моменту. Момент пары сил направлен перпендикулярно к плоскости, в которой лежат силы. Условия равновесия пл. сист. сил: векторное:  . аналитич:
. аналитич:
 , или
, или

где А,В,С – точки, не лежащие на одной прямой, или  , ось "х" не перпендикулярна отрезку АВ.
, ось "х" не перпендикулярна отрезку АВ.
Равновесие тел при наличии трения. Закон Кулона: максимальная сила сцепления пропорциональна нормальному давлению тела на плоскость

 , fсц – коэффициент сцепления (зависит от материала, состояния поверхностей, определяется экспер-но). Направление силы сцепления противоположно направлению того движения, которое возникло бы при отсутствии сцепления. При скольжении тела по шероховатой поверхности к нему приложена сила трения скольжения. Ее направление противоположно скорости тела
, fсц – коэффициент сцепления (зависит от материала, состояния поверхностей, определяется экспер-но). Направление силы сцепления противоположно направлению того движения, которое возникло бы при отсутствии сцепления. При скольжении тела по шероховатой поверхности к нему приложена сила трения скольжения. Ее направление противоположно скорости тела  , f –коэффициент трения скольжения (определяется опытным путем). f<fсц. Реакция шероховатой (реальной) поверхности в отличии от идеально гладкой имеет две составляющие: нормальную реакцию и силу сцепления (или силу трения при движении). Угол jсц–угол сцепления (jтр – угол трения) tgjсц=fсц (tgjтр=f). Конус с вершиной в точке касания тел, образующая которого составляет угол сцепления (угол трения) с нормалью к поверхностям тела назыв. конусом сцепления (конус трения). Для того чтобы тело начало движение, необходимо (и достаточно), чтобы равнодействующая активных сил находилась вне конуса трения. Трение качения – сопротивление, возникающее при качении одного тела по поверхности другого. Причина его появления в деформации катка и плоскости в точке их соприкосновения и смещения нормальной реакции в сторону возможного движения. Мтр= fkN – момент трения качения, fk – коэффициент трения качения; имеет размерность длины.
, f –коэффициент трения скольжения (определяется опытным путем). f<fсц. Реакция шероховатой (реальной) поверхности в отличии от идеально гладкой имеет две составляющие: нормальную реакцию и силу сцепления (или силу трения при движении). Угол jсц–угол сцепления (jтр – угол трения) tgjсц=fсц (tgjтр=f). Конус с вершиной в точке касания тел, образующая которого составляет угол сцепления (угол трения) с нормалью к поверхностям тела назыв. конусом сцепления (конус трения). Для того чтобы тело начало движение, необходимо (и достаточно), чтобы равнодействующая активных сил находилась вне конуса трения. Трение качения – сопротивление, возникающее при качении одного тела по поверхности другого. Причина его появления в деформации катка и плоскости в точке их соприкосновения и смещения нормальной реакции в сторону возможного движения. Мтр= fkN – момент трения качения, fk – коэффициент трения качения; имеет размерность длины.
|
|
|

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!