Тип машины, например, задан в виде 4AH315S8. Это асинхронный двигатель (А) четвёртой серии защищённого исполнения. Если буква Н отсутствует, то двигатель закрытого исполнения.
315 – высота оси вращения в мм;
S – установочные размеры (они задаются в справочнике);
8 – число полюсов машины.
1. 4 –номер серии.
2. А – обозначает, что двигатель асинхронный.
3. Вторая буква за буквой А обозначает исполнение электродвигателя по способу защиты от окружающей среды.
4. Третья буква указывает исполнение двигателя по материалу станины и щитов (А – Станина и щиты алюминиевые; Х – станина алюминиевая, щиты – чугунные; отсутствие буквы означает, что станина и щиты чугунные или стальные).
5. Три или две последующие цифры указывают высоту оси вращения в миллиметрах от 50 до 355.
6. Следующими буквами обозначают установочные размеры по длине станины (S – короткая, M – средняя, L – длинная).
7. В двигателях с одинаковыми длинами станины, но с разными длинами сердечников статора применены дополнительные обозначения сердечников: А – короткие, В – длинные.
8. Последующие цифры (2, 4, 6, 8, 10, 12) означают число полюсов.
9. Конечные буквы и цифры указывают на климатическое исполнение и категорию размещения.
Режимы работы трехфазной асинхронной машины.
Режим двигателя
Этот режим служит для преобразования потребляемой из сети электрической энергии в механическую.
Режим генератора
Этот режим служит для преобразования механической энергии в электрическую, т.е. асинхронная машина должна развивать на валу тормозной момент и отдавать в сеть электрическую энергию.
Режим электромагнитного тормоза
Этот режим работы наступает, если ротор и магнитное поле вращаются в разные стороны. Этот режим работы имеет место при реверсе асинхронного двигателя, когда изменяют порядок чередования фаз, т.е. изменяется направление вращения магнитного поля, а ротор по инерции вращается в прежнем направлении.
Крупнейшие производители асинхронных двигателей (%)
| Название предприятия
|
|
|
| Физический объем (тыс. шт.)
| Стоимостной объем (млн долларов)
| Физический объем (тыс. шт.)
| Стоимостной объем (млн долларов)
|
| Всего по России
| 100,0
| 100,0
| 100,0
| 100,0
|
| Владимирский ЭМЗ
| 16,5
| 22,2
| 16,7
| 26,1
|
| "Элдин"
| 13,8
| 20,6
| 12,5
| 19,1
|
| "Сибэлектромотор"
| 8,0
| 10,7
| 11,8
| 11,2
|
| "Уралэлектро"
| 14,7
| 6,9
| 20,6
| 7,7
|
| Сафоновский ЭМЗ
| 0,1
| 4,9
| 0,1
| 4,7
|
Примеры асинхронных двигателей 6–10кВ.

Двигатели серии А4 и ДА304 имеют диапазон мощностей А4 от 200 до 1000 кВт, ДА304 – от 200 до 800 кВт. Асинхронные электродвигатели серии «ДАЗО»(Двигатель асинхронный закрытый обдуваемый) и А используются в качестве привода различных мощных механизмов с тяжелыми условиями пуска, которые не требуют регулировки частоты вращения–в насосных станциях, централизованных системах вентиляции, промышленных дымососах и пр. Одно из основных отличий между сериями высоковольтных электродвигателей ДАЗО (иногда используется обозначение ДАЗО4) и А (либо же А4) состоит в различном уровне защиты корпуса мотора. При эксплуатации подобного вида двигателей учитываются климатические условия – они рассчитаны на работу в тропическом и умеренном климатах. При эксплуатации двигателей в окружающем пространстве не должно быть химически агрессивных и огневзрывоопасных примесей.
Кратность пускового тока таких двигателей составляет 5–7 раз, а момента от 2 до 3 раз.
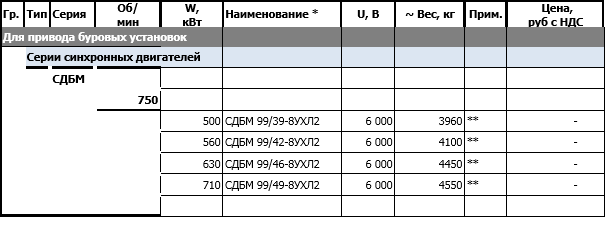
Двигатели АКСБ с фазным ротором, предназначенные для привода буровых установок имеют диапазон мощностей 600, 800, 1000 кВт.
Двигатели ВАКЗ с фазным ротором вертикального исполнения предназначены для привода главных циркуляционных насосов АЭС. Их мощность – 1600 и 3400 кВт
Асинхронные двигатели АТД4 основного исполнения выпускаются на напряжение 6 кВ, а также 10 кВ, диапазон мощностей от 500 до 8000 кВт. Тяговой асинхронный двигатель серии АТД применяется для привода компрессоров, насосов, нагнетателей и быстроходных механизмов.

| ТИП
| РНОМ, кВт
| UНОМ , кВ
| nНОМ, об/мин
| КПД, %
| cosφН
| Iном, А
| Пусковые характеристики
| |
| |
| |
| Iп/Iном
| Мп/Мном
| Ммак/Мном
| |
|
|
|
|
|
|
|
|
|
|
| |
| Синхронная скорость вращения 1500 об/мин
| |
| А4–400ХК–4МУ3
|
|
|
| 94,3
| 0,868
|
| 5,7
| 1,1
| 2,3
| |
| А4–400Х–4МУ3
|
|
|
| 94,7
| 0,876
|
| 5,7
| 1,2
| 2,3
| |
| А4–400У–4МУ3
|
|
|
| 95,1
| 0,879
| 72,5
| 5,7
| 1,2
| 2,3
| |
| Синхронная скорость вращения 1000 об/мин
| |
| А4–400ХК–6МУ3
|
|
|
| 93,6
| 0,852
|
| 5,4
|
| 2,1
| |
| А4–400Х–6МУ3
|
|
|
|
| 0,862
| 47,5
| 5,4
|
| 2,1
| |
| Синхронная скорость вращения 750 об/мин
| |
| А4–400Х–8МУ3
|
|
|
| 93,2
| 0,807
|
|
|
| 1,9
| |
| А4–400У–8МУ3
|
|
|
| 93,6
| 0,82
| 39,5
|
|
| 1,9
| |
| А4–450Х–8МУ3
|
|
|
| 93,9
| 0,82
|
|
|
| 1,9
| |
| Синхронная скорость вращения 600 об/мин
| |
| А4–400Х–10МУ3
|
|
|
|
| 0,761
| 27,5
| 4,8
| 1,1
| 1,9
| |
| А4–400У–10МУ3
|
|
|
| 92,5
| 0,776
| 33,5
| 4,8
| 1,1
| 1,9
| |
| А4–450Х–10МУ3
|
|
|
|
| 0,815
|
| 4,8
| 1,1
| 1,9
| |
| Синхронная скорость вращения 500 об/мин
| |
| А4–450Х–12МУ3
|
|
|
| 92,2
| 0,767
|
| 4,8
| 1,1
| 1,9
| |
| А4–450У–12МУ3
|
|
|
| 92,7
| 0,779
|
| 4,8
| 1,1
| 1,9
| |
| АК4–450Х–12МУ3
|
|
|
| 91,3
| 0,77
|
| 4,8
| 1,1
| 1,8
| |
|
| ТИП
| РНОМ, кВт
| UНОМ , кВ
| nНОМ, об/мин
| кпд, %
| COS jНОМ
| Пусковые характеристики
|
| |
|
|
| |
|
|
| |
|
| Iп/Iном
| Мп/Мном
| Ммак/Мном
|
| |
|
|
|
|
|
|
|
|
|
|
|
| |
|
| ДАЗО4–400ХК–6МУ1
|
|
|
| 93,2
| 0,83
| 6,5
| 1,3
| 2,5
|
| |
|
| ДАЗО4–400Х–6МУ1
|
|
|
| 93,9
| 0,85
| 6,5
| 1,3
| 2,5
|
| |
|
| Синхронная скорость вращения 750 об/мин
|
| |
|
| ДАЗО4–400Х–8МУ1
|
|
|
| 92,5
| 0,77
|
| 1,2
| 2,4
|
| |
|
| ДАЗО4–400У–8МУ1
|
|
|
|
| 0,79
|
| 1,2
| 2,4
|
| |
|
| Синхронная скорость вращения 600 об/мин
|
| |
|
| ДАЗО4–400У–10МУ1
|
|
|
|
| 0,74
|
| 1,3
| 2,3
|
| |
|
| ДАЗО4–450Х–10МУ1
|
|
|
| 92,5
| 0,78
|
| 1,3
| 2,3
|
| |
|
| Синхронная скорость вращения 500 об/мин
|
| |
|
| ДАЗО4–450Х–12МУ1
|
|
|
| 91,7
| 0,75
| 5,5
| 1,3
| 2,3
|
| |
|
| ДАЗО4–450У–12МУ1
|
|
|
| 92,2
| 0,75
| 5,5
| 1,3
| 2,2
|
| |
| | | | | | | | | | | | | | | | | | | | |
|
Источники
1.http://megavattspb.ru/proizvoditely_elektrodvigately.html
2.Леонтьев Г. А., Зенина Е. Г. Исследование асинхронных двигателей с короткозамкнутым и фазным ротором. – Волгоград.: Волгоградский гос. тех. ун–т., 2000.
3. Вешеневский С. Н. Характеристики двигателей в электроприводе. Издание 6–е, исправленное. Москва, Издательство «Энергия», 1977. Тираж 40 000 экз. УДК 62–83:621,313.2
4.http://electricalschool.info/main/osnovy/413–ustrojjstvo–i–princip–dejjstvija.html
5.http://eprivod.com/
Синхронные двигатели 6–10кВ
Конструкция:

Рис 1 – конструкция

Рис 2 –Горизонтальное и вертикальное расположение вала
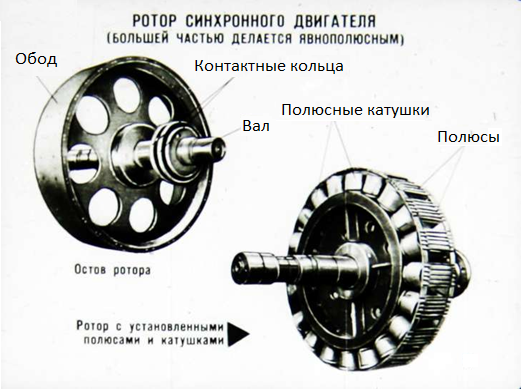
Рис 3 –конструкция ротора

Рис 4 –ротор явнополюсной и неявнополюсной машины
Основные свойства синхронных двигателей:
Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Принципы работы синхронного двигателя:
Электромагнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3–х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. При частоте 50 Гц 3–х фазный поток вращается около 3000 оборотов в 1 минуту. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – –), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из–за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска:
Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3–х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Применение:
Синхронный двигатель используется для улучшения коэффициента мощности. Широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
Находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
 Рис 5 –Синхронный компрессор
Рис 5 –Синхронный компрессор
CД 6–10кB