| | ОМС по Солнцу - общие положения.
| |
| |
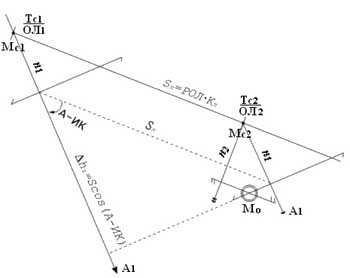
Предположим в судовое время Тс1 при показаниях лага ол1, секстаном измерена высота нижнего края солнца ОС  1 и замечен момент времени по хронометру Тхр1. По отсчету лага ол1 сняв с карты счислимые координаты 1 и замечен момент времени по хронометру Тхр1. По отсчету лага ол1 сняв с карты счислимые координаты  с1 и с1 и  с1, можно рассчитать элементы 1-ой ВЛП - перенос и азимут (n1, A1), который можно отложить из счислимой точки Мс1. Приблизительно через 2 часа, когда азимут Солнца изменится не менее чем на 30°, в судовое время Тс2 произведены 2-ые измерения (ОС 2 и Тхр2). При их обработке используются вторые счислимые координаты с2 и с2, которые сняты с карты по ол2. Рассчитав элементы 2-ой ВЛП (n2 и Ас2), прокладываем её из второй счислимой точки Мс2. Из навигации известно, что для получения обсервованного места по разновременным наблюдениям, необходимо первую линию положения перенести вперед по курсу на величину плавания Sл = ролКл. Или же в нашем случае первую ВЛП необходимо проложить из 2-ой счислимой точки Мс2 до пересечения со 2-ой ВЛП в обсервованной точке Мо. Прокладка обеих ВЛП из 2-ой счислимой точке тождественна прокладке 1-ой ВЛП из первого счислимого места, но первый перенос должен быть исправлен поправкой для приведения к одному зениту с1, можно рассчитать элементы 1-ой ВЛП - перенос и азимут (n1, A1), который можно отложить из счислимой точки Мс1. Приблизительно через 2 часа, когда азимут Солнца изменится не менее чем на 30°, в судовое время Тс2 произведены 2-ые измерения (ОС 2 и Тхр2). При их обработке используются вторые счислимые координаты с2 и с2, которые сняты с карты по ол2. Рассчитав элементы 2-ой ВЛП (n2 и Ас2), прокладываем её из второй счислимой точки Мс2. Из навигации известно, что для получения обсервованного места по разновременным наблюдениям, необходимо первую линию положения перенести вперед по курсу на величину плавания Sл = ролКл. Или же в нашем случае первую ВЛП необходимо проложить из 2-ой счислимой точки Мс2 до пересечения со 2-ой ВЛП в обсервованной точке Мо. Прокладка обеих ВЛП из 2-ой счислимой точке тождественна прокладке 1-ой ВЛП из первого счислимого места, но первый перенос должен быть исправлен поправкой для приведения к одному зениту  hz. Практически удобнее всегда прокладывать обе ВЛП из второго счислимого места. Кроме того, формула hz = Sлcos(А - ИК) справедлива для небольших промежутков времени. hz. Практически удобнее всегда прокладывать обе ВЛП из второго счислимого места. Кроме того, формула hz = Sлcos(А - ИК) справедлива для небольших промежутков времени.
| 
| | |
| | |
| | Влияние ошибок счисления на точность ОМС, планирование наблюдений.
|
| |
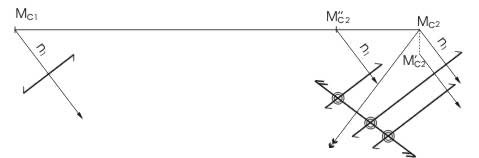
| Главной особенностью определения места судна по разновременным наблюдениям Солнца является тот факт, что место получается счислимо-обсервованным. I-ая ВЛП переносится по счислению, следовательно, все ошибки счисления входят в I-ую ВЛП. Если есть погрешность в поправке компаса, то I-ую ВЛП надо прокладывать не из точки Мс2, а, например, из точки Мс2'. Если при ненадежно работающем лаге на момент вторых измерений мы оказались в точке Мс2'', то I-ую ВЛП будем прокладывать из этой точки. II-ая же ВЛП не завсит от счислимых координат по третьему свойству ВЛП, следовательно, она более надежная. Поэтому обсервованное место может смещаться по II-ой ВЛП, как это показано на правом рисунке.
| 
| | |
| | Радиальная погрешность обсервации вычисляется по формуле
 (4.6) (4.6)
| |
| | Средняя квадратическая погрешность (СКП) 2-ой ВЛП определяется СКП измереннной высоты mлп2 = mh  = 0,5' - 0,7'. А в первую ВЛП всходят ошибки счисления = 0,5' - 0,7'. А в первую ВЛП всходят ошибки счисления  . Известно, что для ОМС по 2-м ЛП необходимо подбирать ориентиры, чтобы линии положения пересекались под углом близким в 90°, что равносильно в мореходной астрономии, чтобы разность азимутов А . Известно, что для ОМС по 2-м ЛП необходимо подбирать ориентиры, чтобы линии положения пересекались под углом близким в 90°, что равносильно в мореходной астрономии, чтобы разность азимутов А  90°. Но такое изменение азимута у Солнце можно дождаться за 4-6 часов. При этом ошибка счисления Мс достигнет значительной величины, следовательно, радиальная погрешность Мо, вычисленная по формуле (.) будет тоже большой, т.е. обсервация будет неточная. Если интервал времени между наблюдениями будет мал (чтобы свести к минимуму погрешность счисления), то и разность азимутов А тоже будет мала, т.е. sin А будет малой величиной, следовательно, радиальная погрешность Мо, вычисленная по формуле (.) будет опять же большой. Чтобы решить эту противоречивую задачу, необходимо по Солнцу измерения проводить тогда, когда за минумум времени, азимут изменяется максимально быстро. Зная особенности изменения азимута в суточном движении, можно сказать, что это бывает только в момент кульминации Солнца. Следовательно, в общем случае для получения надежной обсервации по Солнцу первые измерения необходимо производить где-то за 1 час до кульминации, вторые - спустя час после кульминации. 90°. Но такое изменение азимута у Солнце можно дождаться за 4-6 часов. При этом ошибка счисления Мс достигнет значительной величины, следовательно, радиальная погрешность Мо, вычисленная по формуле (.) будет тоже большой, т.е. обсервация будет неточная. Если интервал времени между наблюдениями будет мал (чтобы свести к минимуму погрешность счисления), то и разность азимутов А тоже будет мала, т.е. sin А будет малой величиной, следовательно, радиальная погрешность Мо, вычисленная по формуле (.) будет опять же большой. Чтобы решить эту противоречивую задачу, необходимо по Солнцу измерения проводить тогда, когда за минумум времени, азимут изменяется максимально быстро. Зная особенности изменения азимута в суточном движении, можно сказать, что это бывает только в момент кульминации Солнца. Следовательно, в общем случае для получения надежной обсервации по Солнцу первые измерения необходимо производить где-то за 1 час до кульминации, вторые - спустя час после кульминации.
| |
| | | |
| | Влияние внешнего фактора на точность обсервации.
| |
| | Выше было сказано, что ошибки счисления влияют на точность обсервации. При действии одного доминирующего фактора (снос течения известного курса, но неивестной скорости, неточная поправка компаса, ненадежная работа лага) для уменьшения его влияния первые наблюдения необходимо производить в определенное заранее расчитанное время. А точнее, первые измерения производятся в тот момент времени, когда I-ая ВЛП будет параллельно внешнему сносу.
| |
| | | | | |
47.) Действия по оказанию помощи терпящему бедствие судну и спасение людей после его гибели.
При оказании помощи терпящему бедствие судну капитан обязан, прежде всего, принять все меры для спасения людей. Эта операция выполняется безвозмездно. Спасание судна, груза и другого имущества производится лишь с согласия капитана бедствующего судна, при условии заключения договора о спасании.
До подхода к аварийному судну необходимо наладить с ним связь, выяснить положение и подготовить все аварийно - спасательные средства к предстоящим действиям, составить примерный план действий, размещения спасенных людей и оказания им медицинской помощи.
Немедленные действия
3.2.1. Любое судно, принявшее сообщение о бедствии, должно немедленно осуществить следующие действия
(a) подтвердить прием и, если это возможно, ретранслировать сообщение о бедствии,
(b) немедленно попытаться взять пеленги во время передачи сообщения о бедствии и поддерживать радиовахту на частотах 500 Кгц и/или 2182 Кгц,
(c) передать на терпящее бедствие судно следующую информацию (|) свои опознавательные данные
(d) свое местонахождение (Ш) скорость и расчетное время прибытия (ЕТА), (IV) при возможности истинный пеленг на судно, терпящее бедствие,
(e) установить непрерывную слуховую вахту на международных частотах
(i) 500 Кгц (радиотелеграфия), И) 2182 Кгц (радиотелефония), ш) 156.8МГц (16-й канал УКВ) (радиотелефония), (е) непрерывно использовать радиолокатор,
(1) находясь вблизи от места бедствия, увеличить число наблюдателей
3.2.2. Судно или береговая станция, контролирующие прием/передачу аварийных радиограмм, должны установить связь с соответствующим СКЦ через береговую радиостанцию и передавать ему всю имеющуюся информацию с необходимыми коррективами.
3.2.3. Суда, которые могут поддерживать связь на частотах бедствия 500 Кгц, 2182 Кгц и 156.8МГц (16-й канал УКВ) должны по возможности повторять сообщение о бедствии на этих частотах
3.3. Следование в район бедствия
3.3.1. Суда, следующие в район бедствия, должны нанести на карту местонахождение курсы, скорости и РТА других судов, оказывающих помощь
3.3.2. Сведения о типах связной аппаратуры, которой оснащаются суда, могут быть получены из списка судовых радиостанций Международного союза электросвязи
3.3.3. Судам следует попытаться воссоздать точную картину обстоятельств, сопутствующих аварии Необходимые сведения которые должны быть включены в сообщение об аварии, перечислены в п.2.2. Если терпящее бедствие судно не передало этих сведений, судно, следующее ему на помощь должно запросить необходимую информацию
Подход к месту действия
3.9.1. При подходе к месту действия суда должны в полной мере использовать любой имеющийся радиопеленгатор для "наведения" и определения местонахождения аварийного радиобуя (ЕР1РБ) Характеристики аварийного радиобуя указывающего местоположение содержатся в Глава 7. Должен работать радиолокатор и вестись эффективное визуальное наблюдение. Типичные дальности обнаружения с помощью радиолокатора приведены в Глава 5, Рис. 5-5
3.9.2. Ночью следует использовать прожекторы или любые другие средства освещения поверхности моря
3.9.3. Координатор надводного поиска должен постоянно иметь информацию о любых контактах достигнутых с помощью радиопеленгования радиолокации или визуального наблюдения. Если координатор не назначен, эта информация должна передаваться всем радиостанциям на частоте или частотах бедствия
3.9.4. Судам следует принять меры к тому, чтобы они были хорошо видны пострадавшим, например посредством дыма днем и яркого освещения в ночное время. Однако следует соблюдать осторожность, так как излишнее использование огней может ухудшить видимость для наблюдателей поисковых судов
3.9.5. При поисках потерпевших, которые могут оказаться в закрытых спасательных плотах, суда должны подавать звуковые сигналы, чтобы привлечь их внимание и чтобы они могли использовать устройства для подачи визуальных сигналов
3.9.6. Дополнительные посты визуального наблюдения необходимо установить таким образом, чтобы на протяжении всего поиска велось непрерывное наблюдение по всему горизонту. Это обеспечит обнаружение сигналов, подаваемых пострадавшими, даже в том случае если судно пройдет мимо
3.9.7. Следует запретить команде судна во время поиска выбрасывать за борт мусор, чтобы он не образовал ложных следов обнаружения
3.10. Прибытие на место действия - процедуры поиска.
3.10.1. Если место бедствия не определено, необходимо без задержки начать поиск, используя соответствующую схему поиска (см. Глава 5)
3.10.2. Для эффективной координации действий координатору надводного поиска и всем судам, идущим на помощь, следует иметь общий план обследования района поиска. При планировании поиска координатор надводного поиска должен полностью использовать все средства электрорадионавигации.
Спасение людей после гибели судна.
Международная конвенция по охране человеческой жизни на море 1960 г. обязывает капитанов судов оказывать всякую возможную помощь людям, грузу и судну, терпящим бедствие. Для этих же целей созданы специальные аварийно-спасательные службы и береговые спасательные станции, имеющие в своем распоряжении необходимые материально-технические средства (суда, вертолеты и т. д.).
Морской практике известны следующие способы снятия людей с гибнущего судна:
снятие людей с гибнущего судна судном-спасателем;
снятие людей с гибнущего судна на берег;
снятие людей с гибнущего судна, пересадка их на судно-спасатель или высадка на берег с помощью вертолета.
Наиболее эффективный способ снятия людей — подход судна-спасателя к борту гибнущего судна. Проведение подобной операции связано с целым рядом факторов, которые должны учитываться капитаном и экипажем судна-спасателя.
Успех этого маневра зависит от гидрометеорологических факторов, крена и характера разрушения аварийного судна, наличия плавающих обломков вокруг него, величины дрейфа обоих судов, обученности и опытности экипажа судна-спасателя.
В случаях, если к гибнущему судну нельзя подойти лагом или носом, то для спасения людей применяют шлюпки, плоты, спасательные беседки (при установленном леерном сообщении) и используют вертолеты.
Аварийное судно и судно-спасатель должны выпускать масло для создания пространства без опрокидывающихся гребней волн, что значительно облегчает работу шлюпок.
Не рекомендуется производить спасательные операции ночью, если условия погоды и состояние аварийного судна позволяют ему продержаться до наступления светлого времени суток.
Во всех случаях чрезвычайно важно установить надежную связь между спасателем и гибнущим судном.
Снятие людей с гибнущего судна на берег наиболее успешно осуществляется береговыми спасательными станциями, оборудованными шлюпками различных типов, линеметательными аппаратами и приспособлениями для леерного сообщения при помощи беседки или крытой шлюпки.
На терпящее бедствие судно со спасательной станции при помощи линеметательного аппарата подают линь, к которому крепят блок горденя с бесконечным лопарем. После того как блок закреплен к мачте или другому возвышенному месту судна, на него с помощью горденя подают леер, который закрепляют на 350—400 мм выше горденя, и беседку. Последнюю четырьмя стропами крепят к особому блоку, который ходит по лееру. Блок беседки крепят к горденю так, что если тянуть за верхнюю ветвь горденя, то оеседка будет перемещаться к берегу; если за нижнюю, то блок вместе с беседкой пойдет к судну.
В тех случаях, когда аварийное судно находится от берега на расстоянии, которое не позволяет установить леерное сообщение или когда необходимо спасти большое количество людей, применяют специальную крытую спасательную шлюпку.
В настоящее время весьма эффективными являются операции по снятию людей с гибнущего судна при помощи вертолета.
Для подачи линя на бедствующее судно или на берег суда снабжаются линеметательными устройствами, в комплект которых входит приспособление для пуска ракеты, перчатка, ракета, линь и кассета для укладки линя. Для пуска ракеты служит пистолет, линеметательное ружье и пушка, принципиальное устройство которых одинаково.
По требованиям Международной конвенции по охране человеческой жизни на море линеметательное устройство должно бросать линь с достаточной точностью на расстояние не менее 230 м и включать не менее четырех метательных снарядов и четырех линей.
48. Фазовые РНС. Точные навигационные системы УДС. Оценка точности.
Общие сведения
В настоящее время в морской навигации широко используются шесть основных типов РНС:
фазовая РНС на длинных волнах ("Декка-Навигатор");
фазовая РНС на сверхдлинных волнах ("Омега");
импульсно-фазовые РНС (РСДН, «Лоран-С» и др.);
низкоорбитальные спутниковые РНС («Цикада», СССР; «Транзит». США»);
системы радиопеленговании (радиомаяки с радиопеленгаторами);
секторные радиомаяки (ВРМ-5, «Консол», «Консолан»).
Последние два типа РНС относятся к амплитудным и позволяют измерять радионавигационный параметр (РНП) в виде азимутов (углов), остальные РНС — в виде разностей расстоянии до двух станций цепочки или нескольких последовательных положений спутника на орбите.
Точность определения места по РНС зависит главным образом от взаимного расположения судна и береговых станций цепочки (геометрический фактор) и ошибок в показаниях индикаторов (влияние условий распространения радиоволн, стабильности шкал времени).
Средняя квадратическая погрешность (СКП) п линии положения (ЛП) судна, получаемая при измерении РНП с помощью указанных РНС,
 ,
,
где р - СКП измеряемого радиотехнического параметра (разности фаз, времени, пределов угла молчания и др.) в единицах определяемой ЛП;
g - градиент ЛП, зависящий oт типа РНС.
Средняя квадратическая погрешность места судна по двум ЛП
 ,
,
где 
 - СКП в определении ЛП:
- СКП в определении ЛП:
—угол между ЛП;
k— коэффициент корреляции.
Значения р и k для каждого типа РНС указаны ниже. Значения g зависят от типа РНС. Для угломерной РНСg= 1/r: дальномерной g= 1; гиперболической g==2sin(/2). В последнем выражении — базовый угол системы, т. е. угол, под которым с судна видна база; r - расстояние до радиомаяка.
Если р1 = р2 = р, тогда
 ,
,
где  - геометрический фактор РНС.
- геометрический фактор РНС.
Импульсно-фазовые РНС.
Принцип работы. Импульсно-фазовые РНС работают на частоте 100 кГц и излучают пакеты радиоимпульсов. Ведущие станции излучают по 9 импульсов в пакете, ведомые по 8. Импульсы в пакетах кодируются по фазе высокочастотного заполнения, что необходимо для автоматического поиска сигналов и устранения влияния многократных отражений предыдущих импульсов в пакете на последующие. Фазовый код для радиоимпульсов ведущих станций отличается от фазового кода ведомых станций, что обеспечивает при автопоиске опознавание сигналов ведущих станций и ведомых.
Ведомые станции, входящие в одну цепочку, различаются между собой по кодовому времени задержки излучения ими пакетов радиоимпульсов относительно момента излучения ведущей станцией.
Ведомые станции в цепочках РНС «Лоран-С» обозначаются буквами W, X, Y, Z; в РНС РСДН - буквами Б, В, Г, Д. Цепочки отличаются друг от друга периодами повторения пакетов радиоимпульсов.
Обозначение (номер) цепочек состоит из числа десятков микросекунд, определяющих точное значение периода повторения сигналов данной цепочки Тп/10. Например, число 7970 обозначает цепочку РНС "Лоран-С". Норвежского моря, которая излучает сигналы с периодом повторения, равным Тп = 79700 мкс.
Излучение сигналов ведущими станциями всех цепочек «Лоран-С» синхронизировано со всемирным координированным временем (UTC).
В настоящее время работает 19 цепочек РНС «Лоран-С» и две отечественные цепочки РНС РСДН (рис. 4.6).
Современные судовые приемоиндикаторы подразделяются на автоматические и полуавтоматические.
Автоматические обеспечивают автопоиск сигналов ведущей и ведомых станций и измерение разности времени между моментами прихода сигналов от станций с точностью до 0,3 мкс. Автоматические приемоиндикаторы содержат вычислители-преобразователи гиперболических координат в географические и индицируют на табло или дисплее непосредственно эти координаты.
Полуавтоматические приемоиндикаторы (отечественный КПИ-5Ф) обеспечивают работу по сигналам станций, уровень которых превышает уровень шумов, т. е. когда возможен визуальный поиск сигналов цепочки на экране ЭЛТ.
После нахождения сигналов и установки их вручную в соответствующие точки развертки ЭЛТ включается схема автослежения, которая автоматически измеряет радионавигационный параметр с точностью до 0,3 мкс.
Дальность действия по поверхностным сигналам при распространении их над морем составляет ночью до 500—700, днем до 1000-1200 миль. Использование только поверхностных сигналов для точных измерений—главная особенность импульсно-фазовой РНС.
Использование пространственных сигналов допустимо при плавании в открытом море. При этом дальность приема таких сигналов составляет до 2300 миль от береговых станций.
Точность определения места. По поверхностным сигналам СКП определения места находится по формуле (4.6). Значения геометрического фактора определяются из рис. 4.4 причем = (0,1: 0,3) мкс в зависимости от соотношения уровней сигнала и шума в точке приема, а
 ,
,
где v=300 м/мкс.
При расстоянии 300-500 миль от ведущей станции СКП места составляет от 60 до 200 м.
Вблизи районов с резким изменением проводимости трассы распространения радиосигналов (суша—море) возникают, как и в РНС «Декка», «местные» систематические погрешности в измерениях, Поэтому для морских районов западного и восточного побережья США изданы таблицы поправок AЫА (Additional Secondary Factor) за отклонение фазовой скорости распространения радиоволн от принятой. Максимальные поправки ASF для отсчётов радионавигационного параметра по поверхностным сигналам могут достигать до 4мкс.
При использовании пространственных сигналов в отсчеты необходимо вводить поправки типа SS или SG. Эти поправки публикуются в виде таблиц, предваряющих таблицы преобразования координат РНС, а также печатаются непосредственно на навигационных картах системы.
Точность определения места с использованием пространственных сигналов значительно ниже, чем при определениях по поверхностным. Поэтому данные, полученные при работе по отраженным сигналам, не рекомендуется использовать в прибрежном плавании.
49. Определение места по звездам и планетам. Оценка точности.
Одновременными условно называют наблюдения двух и более светил, выполняемые в быстрой последовательности. Такие наблюдения обычны для сумерек при определениях по звездам и (или) планетам, а в периоды квадратур возможны определения по одновременным наблюдениям Солнца и Луны. Общим для всех таких определений места является то, что перемещение судна за время между измерениями высот учитывается приведением их к одному месту (зениту). Различаются такие определения по числу наблюдаемых светил, от чего зависит наивыгоднейшая разность их азимутов, выбор места относительно, фигуры погрешностей и оценка точности результатов.
Порядок действий при определении места по одновременным наблюдениям светил:
- подобрать светила с наивыгоднейшей разностью азимутов — 50—70° для двух светил, примерно по 120° для трех и по 90° для четырех светил;
- измерить в быстрой последовательности высоты светил (желательно по 3—5 раз каждого), замечая моменты по хронометру;
- заметить судовое время Тс и отсчет лага, снять с карты счислимые координаты судна φс и λс на этот момент, записать курс ИК, и скорость V;
- определить поправку индекса секстана (можно до наблюдений) и если позволяют условия, измерить наклонение горизонта;
- если измерения выполнялись сериями, то найти средние из моментов по хронометру и отсчетов секстана для каждого светила;
- найти приближенное время и дату на Гринвиче по Тс и номеру часового пояса, рассчитать точные моменты Тгр по хронометру и его поправке для каждого измерения высоты пли среднего из серии;
- определить координаты светил tгр и δ на дату и моменты Тгр;
- решить параллактические треугольники и перевести азимут А в круговой счет:
- исправить высоты светил и привести их к одному месту (зениту), которому соответствуют Тс и ОЛ;
- рассчитать переносы h0 — hс, проложить линии положения, найти обсервованное место и невязку;
- оценить точность полученной обсервации.
Прокладка всех линий положения выполняется одинаково: через счислимую точку про водят линию азимута, отмечая стрелкой направление на светило; вдоль этой линии откладывают перенос h0 — hс в сторону светила (если он положителен) или в противоположную (если он отрицателен); через полученную определяющую точку проводят перпендикулярно линии азимута высотную линию положения (ВЛП). Прокладку лучше всего выполнять на карте, на которой ведут счисление, и в том же масштабе. При прокладке на бумаге произвольную точку принимают счислимой, от нее откладывают по линиям азимутов переносы в одинаковом масштабе и в том же масштабе измеряют разность широт Δφ и отшествие Δω между счислимой и обсервованной точками, а также величину невязки С между ними. Величину Δω переводят в разность долгот Δλ = Δω*secφс (табл. 25-а МТ—75) и вычисляют обсервованные координаты:
φ0 = φс + Δφ
λ0 = λс + Δλ
В широтах до 70° часто пользуются угловым масштабом: строят угол, равный счислимой широте, вдоль его наклонной шкалы выбирают масштаб расстояний, по которому измеряют h0 — hс, Δφ и С, а проекция этой шкалы на горизонтальную сторону угла дает шкалу измерения Δλ.
При определениях по двум светилам обсервованное место принимают в точке пересечения их линий положения. Средняя квадратическая погрешность места М зависит от разности азимутов ΔА = А2 — А светил по формуле Каврайского:
где εh и σh — средние квадратические значения случайных и повторяющихся погрешностей высот.
Круг радиуса.V/c центром в обсервованной точке содержит действительное, место с вероятностью 63—68%. Если радиус этого круга увеличить вдвое, то вероятность захвата им действительного места возрастает примерно до 95%.
50. Управление буксирными составами и их формирование.
Буксировка судов является одной из наиболее сложных морских операций. Для успешного ее проведения требуется выполнение специальных расчетов и применение методов и приемов, выработанных морской практикой.
Существует три вида буксировки: за кормой на буксирном канате, лагом, т.е. борт о борт и методом толкания. Мы будем рассматривать лишь первый вид, применяемый при буксировке в открытом море на волнении.
Движение буксирующего и буксируемого судов, т.е. буксирного каравана обеспечивается силой упора винта буксирного судна – буксировщика. Скорость буксировки при установившемся режиме будет такой, при которой суммарное сопротивление буксировщика и буксируемого объекта равны силе упора винта буксировщика при данной частоте его вращения. Горизонтальная составляющая натяжения буксирного каната равняется силе сопротивления буксирного объекта. Эта сила в каждой точке буксирной линии имеет постоянную величину и называется тягой на гаке.
При неустановившихся условиях – разгон из неподвижного состояния, рыскание судов, воздействие шквала, рывки при волнении – тяга на гаке может резко возрастать, поэтому буксирный канат должен обладать запасом прочности.
Выбор буксировщика и определение скорости буксировки. Если заранее намечена скорость буксировки какого-либо объекта, возникает необходимость выбора буксировщика. Задача сводится к выбору такого судна, упор винта (тяга винта) которого при выбранной скорости буксировки был бы больше силы сопротивления его корпуса на величину, равную силе сопротивления буксируемого объекта при заданной скорости, т.е. равную требуемой тяге на гаке Тг. Если существует возможность выбора между морским буксиром и транспортным судном, то предпочтение следует отдавать морскому буксиру, так как транспортные суда не приспособлены специально к буксировке и менее эффективны в работе.
Тягу винта при разной частоте вращения и силу сопротивления получают по графикам ходовых характеристик в зависимости от выбранной скорости. Эти характеристики представляют собой совокупность графиков тяги винта Ре для разных значений частоты вращения n, располагаемой полезной тяги и силы сопротивления R для ряда осадок. По вертикальной оси откладываются перечисленные силы, а по горизонтальной – скорость судна. Для буксирных судов на ходовых характеристиках помимо указанных графиков приводится график тяги на гаке, дающий разность между располагаемой тягой и силой сопротивления, а также график буксировочного КПД hz. Пример ходовых характеристик для буксирного судна приведен на рис. 9.1.
Если буксировщик известен заранее, то нужно определить скорость буксировки, которую он способен обеспечить. Эта задача также решается с помощью графиков ходовых характеристик буксировщика и графика силы сопротивления буксируемого объекта. Если построить в общих координатах график тяги на гаке буксировщика и график силы сопротивления буксируемого объекта, то точка их пересечения укажет скорость буксировки.

Рис. 9.1. График ходовых характеристик
Если буксируется судно с застопоренным винтом, то сила сопротивления возрастает приблизительно на 30%, а при разобщенном (свободно вращающемся) винте – на 5-10%. В этом случае сопротивление буксируемого oбъeктa Rб.о. определяется по формуле
 , Рб.о. = Rк + Rв, (9.2)
, Рб.о. = Rк + Rв, (9.2)
где Rк – сопротивление корпуса, определяемое по ходовым характеристикам; Rв – сопротивление застопоренного или свободно вращающего винта, принимаемое равным, соответственно, 30 или 5-10% от сопротивления корпуса.
Найденная указанным порядком скорость буксировки будет приблизительно оправдываться при отсутствии ветра и волнения.
Если отсутствуют графики ходовых характеристик или информация, их заменяющая, то сопротивление буксировщика и буксируемого судна можно рассчитать приближенно по эмпирическим формулам. Сопротивление трения в кгс определяется по формуле:
 , (9.3)
, (9.3)
а остаточное сопротивление – по формуле:
 (9.4)
(9.4)
где Rf – сопротивление трения, кгс; f – коэффициент трения, выбираемый по длине судна из таблиц, приведенных в учебнике и в «Справочнике капитана»; g – удельный вес морской воды, т/м3; W – площадь смоченной поверхности, м3; V – скорость движения, м/с; Rr – остаточное сопротивление, кгс; d – коэффициент полноты водоизмещения; D – водоизмещение судна, т; L – длина судна, м.
При отсутствии таблиц коэффициент трения можно рассчитать по формуле
 . (9.5)
. (9.5)
Для приближенных расчетов силу упора винта можно принимать равной силе упора на швартовах Ршв, и рассчитывать ее по эмпирической формуле
Ршв = 10 Nв,где (9.6)
Ршв – сила упора винта (тяга) на швартовах, кгс;Nв – мощность двигателя,подводимая к винту, л.с.
Буксировка бывает простой, когда буксир тянет одно буксируемое судно, и сложной, когда за буксиром идет несколько буксируемых судов или несколько буксиров тянут одно большое плавучее сооружение. Соединение из буксира и буксируемого судна называется караваном, а буксируемые в караване суда — буксирным составом.
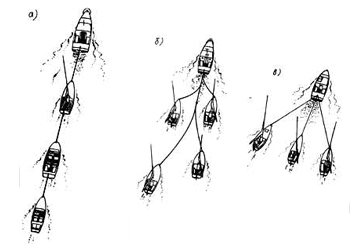
Способы сложной буксировки кильватер:
а — одной колонной на отдельных буксирных тросах, подаваемых с судна на судно; б — на общем буксирном тросе; в — «веером».
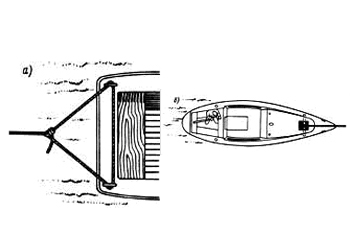
Крепление буксирного троса на буксирующем катере (а) и на буксируемом судне (б).

Общая брага, заведенная вокруг рубки яхты.
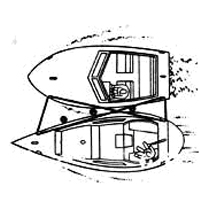 Крепление буксируемого судна при буксировке лагом.
Крепление буксируемого судна при буксировке лагом.

Вариант буксировки лагом, с использованием одного буксирного конца.
Если на буксире гребной винт правого вращения, то буксируемое судно ставится с правого борта буксира.
СПОСОБЫ БУКСИРОВКИ. Существует три способа буксировки: кильватерный, когда буксируемое судно следует за кормой буксира, лагом, когда оба судна располагаются борт о борт, и толканием. Наиболее часто для буксировки маломерных судов применяется кильватерный способ. Буксировка лагом применяется в основном на ограниченных акваториях, где затруднено маневрирование, и при отсутствии волнения. Для буксировки способом толкания необходимы специальные приспособления на носу буксира и корме толкаемого судна. Этот способ буксировки используется в основном на относительно спокойных акваториях при транспортных перевозках грузов.
При кильватерном способе буксировки буксируемые суда могут быть составлены в одну, две, три и даже четыре кильватерные колонны. Правда, буксировка несколькими колоннами может безаварийно осуществляться только в хорошую погоду и на небольшие расстояния. При наличии волнения и сильного ветра буксируемые суда легко сбиваются в кучу и сталкиваются, повреждая друг друга, особенно при изменении скорости или остановке каравана.
Если буксируемых судов немного (2—5), то на небольшое расстояние и в хорошую погоду их можно буксировать «веером». В этом случае каждое судно соединяется своим буксирным тросом непосредственно с буксиром, а длина каждого троса регулируется таким образом, чтобы буксируемые суда не оказались борт о борт, иначе на волнении или при зарыскивании может произойти их столкновение. Последняя рекомендация справедлива и для тех случаев, когда суда буксируются параллельно друг другу кильватерными колоннами.
Буксировка является весьма сложной операцией, требующей от судоводителей буксира и буксируемого судна практического опыта, внимания и осторожности.
Буксирный караван во всех случаях имеет худшую маневренность и меньшую скорость, чем при свободном плавании отдельных судов. А главное, караван в гораздо большей степени чувствителен к воздействию стихийных сил, чем одиночные суда. Сложнее всего буксировка оказывается тогда, когда не приспособленное для этой цели судно буксирует другое, на котором тоже отсутствуют буксирные устройства. Поэтому, чтобы операция прошла успешно, к ней нужно хорошо подготовиться, в особенности если она будет проходить на большие расстояния в открытых водоемах или на реках с сильным течением и многочисленными препятствиями (мосты, шлюзы, переправы и т. п.), затрудняющими плавание.
51. Характеристики персональных компьютеров. Задачи, решаемые с их помощью на судне.
Характеристики разнообразные, в зависимости от характера выполняемой деятельности. Области применения: ГМССБ, ЭНК, Судовая документация, Контролирование работы механизмов, Индикация состояний оборудования и т.д.
52. Определение поправки компаса.
Магнитное склонение d – это угол в плоскости истинного горизонта между географическим (истинным) и магнитным меридианами.
На 1985 г. d = 1о W, годовое изменение d = 0,2o, склонение в 2000 г. -?
Решение:
Δt = 2000-1985 = 15 лет
d2000 = d + ΔdΔt = +2o E
На судне обычно устанавливают два различных компаса: главный компас для определения места судна и путевой – для управления судном. Главный компас устанавливают в ДП судна, в месте, обеспечивающем круговой обзор и максимальную защищённость от судовых магнитных полей. Обычно – это навигационный мостик судна.
Расчёт девиации:
δi = МП - КПi
И составляют таблицу или график девиации как функции компасного курса.
Если производят сличение путевого и главного магнитных компасов или путевого и гирокомпаса, то справедливы соотношения:
ККп + δп = ККгл + δгл
ККп + δп = ГКК + ΔГК - d
По требованиям ПДНВ-78/95 требуется, чтобы вахтенный помощник каждые 4 часа определял поправку компаса. Существуют следующие виды вычисления поправок:
1. По створам;
2. По пеленгу удаленного ориентира;
3. С помощью пеленгования светила;
4. По сличению с другим компасом;
5. Методом взаимных пеленгов.
53. Тропические циклоны и расхождение с ними.
Тропические циклоны (ТЦ) - это перемещающаяся обычно со скоростью от 100 до 240 миль в сутки область низкого атмосферного давления диаметром от 60 до 600 миль, в которой происходит интенсивное круговое движение воздушных масс против часовой стрелки в северном полушарии и по часовой в южном.
В Атлантике ТЦ называют ураганами,
на Тихом океане - тайфунами,
на юге Индийского океана - орканами,
у берегов Австралии - вилли-вилли.
Продолжительность существования ТЦ от 3 до 20 суток.
Тропические циклоны, зарождающиеся в тропической зоне Мирового океана, представляют реальную угрозу безопасности мореплавания даже для современных транспортных судов, имеющих неограниченный район плавания. Ураганные ветры, сильное волнение моря, ливневые осадки и грозы сопровождают тропический циклон на всем пути его перемещения. Особенно опасной для морских судов является центральная область тропического циклона — около 50 миль от его центра.
Всем судам независимо от класса и назначения рекомендуется уклоняться от встречи с тропическими циклонами и следовать по их перифериям на расстоянии не менее 500 миль от центров ураганов.
Обязанности штурмана при плавании в зонах действия тропических циклонов. Основным источником информации о тропических циклонах являются штормовые предупреждения, передаваемые соответствующими гидрометеорологическими центрами.
Получив предупреждение о тропическом циклоне, вахтенный штурман обязан нанести на прокладочную карту его центр и проставить время. От этой точки пунктирной стрелкой в направлении, указанном в предупреждении, нанести предполагаемое местоположение урагана на ближа<






