

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Марксистская теория происхождения государства: По мнению Маркса и Энгельса, в основе развития общества, происходящих в нем изменений лежит...
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Интересное:
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Суда морского флота России оборудованы за небольшимисключением двухроторными гирокомпасами типа «Курс».
На судах с бортовой сетью постоянного тока напряжением 110 в или 220 в устанавливаются гирокомпасы типа «Курс-3». На судах с бортовой сетью переменного тока напряжением 220 в или 380 в и частотой 50 гц устанавливаются гирокомпасы типа «Курс-4».
Гирокомпасы «Курс-3» и «Курс-4» отличаются друг от друга агрегатами питания и незначительными конструктивными особенностями.
Гирокомпас типа «Курс» состоит из основного прибора, агрегата питания, приборов управления и контроля, системы охлаждения, принимающих приборов.
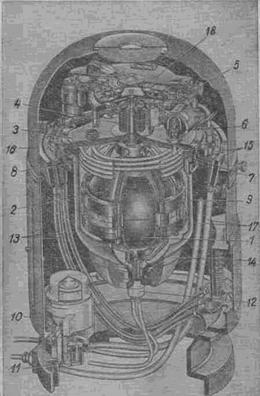
Рис. 4. Основной прибор гирокомпаса типа «Курс»: 1 — чувствительный элемент; 2 — следящая сфера; 3 — стол; 4 — коллектор; 5 — щеткодержатель со щетками; 6 — замыкатель ревуна; 7—термореле; 8 — змеевик охлаждения; 9— резервуар, 10— нактоуз, 11 — помпа ускоренного приведения в меридиан; 12 — подвижный штуцер; 13 — кабели питания прибора, 14 — балансировочный груз; 15 — карданные кольца, 16—колпак; 17—шланги охлаждения, 18—корректор (механизм 9).
10. Стандартный морской разговорник ИМО. Пользование английским языком в различных видах профессиональной деятельности.
Стандартный морской разговорник ИМО предназначен для связи по вопросам обеспечения безопасности плавания и оказания помощи на море между судами различной национальности, а также судами и берегом и между судами, когда отсутствует общий язык и в случаях возникновения языковых трудностей
11. Влияние внешних факторов на управляемость и маневренность судна.
На надводную часть судна действует кажущийся ветер, который является суммой истинного Wи и курсового ветра 
 . Надводная и подводная часть корпуса рассматривается 2-мя свойствами:
. Надводная и подводная часть корпуса рассматривается 2-мя свойствами:
|
|
1) Равнодействующая всех сил, всегда смещается к передней кромке крыла по направлению движения.
2) Направление равнодействующей сил стремится к нормали поверхности.
Судоводитель всегда измеряет кажущийся ветер на движущемся судне. Он характеризуется величиной курсового угла qw и скоростью W. Величина аэродинамической силы действующей на судно рассчитывается:
 ,
,
где Са — коэффициент аэродинамичности
рв - плотность ветра
Sн - площадь проекции подводной части на ДП
 W - скорость кажущегося ветра.
W - скорость кажущегося ветра.
Плечо аэродинамической силы в безразмерном виде можно рассчитывать

lо - смещение центра боковой парусности относительно ДП
Разложим Ra на Rax и Ray.
 Продольная составляющая Rax вызывает изменение cопротивления, а сила Ray - боковое смещение. Под действием Ray на корпусе судна возникает ветровой дрейф с утлом
Продольная составляющая Rax вызывает изменение cопротивления, а сила Ray - боковое смещение. Под действием Ray на корпусе судна возникает ветровой дрейф с утлом
При движении корпуса судна с углом дрейфа на подводной его части возникает
гидродинамическая сила:  ,
,
где Cr - безразмерная сила гидродинамической силы
Р - плотность воды
Sn - площадь проекции подводной части корпуса по ДП
V - скорость судна.
Эта сила направлена в сторону противоположную Ra, а её плечо:
 ,
,
 - угол дрейфа
- угол дрейфа
Поскольку моменты аэро и гидро сил направлены в противоположные стороны, то для удержания судна на курсе момент от силы на руле должен быть больше разности Мр>Ма - Mr. По этой причине при носовых курсовых углах судно управляется хорошо.
Управляемость судна при кормовых углах ветра.
При кормовых курсовых углах ветра, точка приложения аэродинамической силы смещается в сторону кормы.
 При появлении угла ветрового дрейфа по надводной части корпуса судна возникает поперечная гидродинамическая сила Rry - которая направлена в сторону противоположную Ray, но смещается в сторону носа от миделя. В этом случае знаки Ма и Мг совпадают. Для удержания судна на курсе необходимо переложить руль, момент которого должен скомпенсировать сумму Мр>Ма + Mr, по этой причине судно на кормовых курсовых углах ветра управляется плохо.
При появлении угла ветрового дрейфа по надводной части корпуса судна возникает поперечная гидродинамическая сила Rry - которая направлена в сторону противоположную Ray, но смещается в сторону носа от миделя. В этом случае знаки Ма и Мг совпадают. Для удержания судна на курсе необходимо переложить руль, момент которого должен скомпенсировать сумму Мр>Ма + Mr, по этой причине судно на кормовых курсовых углах ветра управляется плохо.
|
|
Потеря управляемости.
При движении постоянным курсом, при отсутствии ветра, судно удерживается на курсе перекладками руля Sтв, вокруг ДП судна Sтв=2 - 3
При движении в условиях ветра, руль приходится перекладывать на некоторый постоянный угол Sкомпенс, который компенсирует действия внешней силы манипулировать рулём этого положения на угол Sв=10-15.

Руль как средство управления, эффективен до углов перекладки руля 35

Условие потери управляемости можно записать двумя способами либо другим способом записи является равенство:  .
.
Момент на руле больше либо равняется сумме аэро и гидродинамической сил. Если перед потерей управляемости судно приводится к ветру, то говорят, что наступает потеря управляемости первого рода. Если же при потере управляемости судно уваливается под ветер, то говорят, что наступает потеря управляемости второго рода.

Для оценки потери управляемости для каждого судна можно построить диаграмму потери управляемости:

12. Магнитный компас «КМО-Т». Уничтожение девиации способом Эри. Составление таблиц остаточной девиации и корректировка в рейсе.
 Компас КМО-Т (компас магнитный, оптический для транспортных судов) с оптикой, позволяющей транслировать показания в любое место, с которого управляют судном, — в ходовую рубку, мостик и т. П. Основные узлы КМО-Т (10) — ч. э., котелок, нактоуз, оптическая система и пеленгатор. Все цифры и буквенные обозначения румбов на диске картушки выполнены в виде сквозных отверстий. Сверху и снизу котелок герметично закрыт стеклянными крышками, причем внутренняя полость разделена пополам перегородкой, тоже стеклянной. Нактоуз, связывающий все узлы компаса, трубу оптической системы, выведенную в ходовую рубку, делают из немагнитного титанового сплава.
Компас КМО-Т (компас магнитный, оптический для транспортных судов) с оптикой, позволяющей транслировать показания в любое место, с которого управляют судном, — в ходовую рубку, мостик и т. П. Основные узлы КМО-Т (10) — ч. э., котелок, нактоуз, оптическая система и пеленгатор. Все цифры и буквенные обозначения румбов на диске картушки выполнены в виде сквозных отверстий. Сверху и снизу котелок герметично закрыт стеклянными крышками, причем внутренняя полость разделена пополам перегородкой, тоже стеклянной. Нактоуз, связывающий все узлы компаса, трубу оптической системы, выведенную в ходовую рубку, делают из немагнитного титанового сплава.
Кроме компасов УКП-М, на речных судах устанавливают компасы с дистанционной оптической передачей марки КМО-Т. Такой компас обычно устанавливают на верхнем мостике над рулевой рубкой, а его показания передаются в рулевую рубку к посту управления рулем. Компас КМО-Т имеет в своем составе те же части, что и обычный компас УКП-М. Передача показаний осуществляется с помощью оптической системы.
|
|
Детали оптической системы помещаются частично в нактоузе, а частично в специальной трубе оптического тракта, которая проходит от места установки компаса в рулевую рубку. Труба состоит из неподвижной и подвижной частей. В нижней подвижной части установлено зеркало, через которое видны показания курса. Оптическая система компаса КМО-Т (рис. 21) состоит из защитного стекла 1, верхней 2 и нижней 3 линз, обогревного стекла 4 и зеркала 5. Картушка, котелок, девиационный прибор и нактоуз имеют различия в конструкции по сравнению с компасом УКП-М.
Рис. 21. Оптическая система компаса КМО-Т
Сущность способа Эри
Способ Эри является одним из наиболее распространенных способов уничтожения полукруговой девиации.
При уничтожении полукруговой девиации способом Эри силы В/ и С/ компенсируйте на четырех главных магнитных курсах по девиациям, наблюденным на этих курсах.
Основными достоинствами этого способа является простота его применения и высокая точность результатов. Этот способ не требует вспомогательных приборов и поэтому применим для компасов любых систем.
Однако способ Эри имеет некоторые недостатки. При работе способом Эри приходится ложиться на магнитные курсы и на каждом из них определять девиацию, что возможно лишь при наличии на берегу створа или в крайнем случае отдаленного ориентир.
Повернув корабль на магнитный курс N или S, ставят магнит перпендикулярно диаметральной плоскости и приближают его к компасу настолько, чтобы девиация равнялась нулю; в этом положении закрепляют магнит — он уничтожает силу  ; повернув затем корабль на курс О или W, ставят другой магнит, параллельный диаметральной плоскости, и приближают его настолько, чтобы девиация равнялась нулю — этот магнит уничтожает силу
; повернув затем корабль на курс О или W, ставят другой магнит, параллельный диаметральной плоскости, и приближают его настолько, чтобы девиация равнялась нулю — этот магнит уничтожает силу  , повернув затем корабль на один из курсов NO, SO, SW или NW, ставят бруски железа и приближают их настолько, чтобы довести девиацию на занимаемом кораблем курсе до нуля. В этом положении бруски уничтожают силу
, повернув затем корабль на один из курсов NO, SO, SW или NW, ставят бруски железа и приближают их настолько, чтобы довести девиацию на занимаемом кораблем курсе до нуля. В этом положении бруски уничтожают силу  . Таким образом девиация будет уничтожена.
. Таким образом девиация будет уничтожена.
Ни одним из способов девиацию нельзя уничтожить до нуля. Поэтому после уничтожения девиации необходимо составить таблицу остаточной девиации и пользоваться ею для исправления показаний магнитного компаса.
|
|
13. Земные эллипсоиды. Меркаторские проекции. Географические координаты и их разности.
Плотность масс Земли в её толще распределена чрезвычайно неравномерно, поэтому уровенная поверхность образует сложное в математическом отношении трёхмерное тело. Эта фигура, образованная уровенной повехностью, имеющая неправильную геометрическую форму, и называется геоидом, что в переводе с греческого означает «землеподобный».
Для решения задач морской навигации используют аппроксимацию (приближение) геоида телом неправильной математической формы. Это тело – эллипсоид вращения, полученный в результате вращения эллипса вокруг малой оси. Другими словами, геоид заменяют его моделью. Сочетание геоида, а также эллипсоида по экватору и мередиану 80Е…100W.
Используют следующие способы апроксимации:
- объём эллипсоида предполагается равным объёму геоида;
- большая полуось элипсоида а совпадает с плоскостью экватора геоида;
- малая полуось b направлена по оси вращения Земли;
- сумма квадратов уклонений поверхности эллипсоида от поверхности геоида выбирается минимальной;
Для геодезических и картографических расчётов в определённых районах Земли необходимо иметь земной эллипсоид, поверхность которого максимально совпадает с поверхностью этого района. Очевидно, что такой эллипсоид должен иметь вполне определённые ориентацию и размеры. Это референц-эллипсоид. В конкретном государстве к нему и относят измерения на земной поверхности.
В России в качестве референц-эллипсоида принят референц-эллипсоид Ф. Н. Красовского. Этот референц-эллипсоид вычислен группой учёных под руководством профессора Ф. Н. Красовского. Модель имеет следующие параметры:
- большая полуось a = 6378245 м;
- малая полуось b = 6356863 м;
- полярное сжатие a –b) / a = 1/298.3;
- эксцентриситет e = (a2-b2) / a = 0.0818
Отклонения данного эллипсоида от геоида на территории нашей страны не превышает 150 м.
В навигационных задачах, не требующих высокой точности, Землю принимают за шар, объём которого равен объёму земного эллипсоида, исходя за соотношение:
4/3R3 = 4/3R2b.
Для референц-эллипсоида Красовсокого радиус модели Земли как шара равен:
R = 6371110 м.
В качестве модели геоида для спутниковых навигационных систем до недавнего времени, например, использовали эллипсоид WGS-72, в настоящее время используется более точная модель WGS-84 (World Geodetic System – 1984).
Меркаторская проекция относится к классу цилиндрических нормальных равноугольных проекций, в которых параллели нормальной сетки есть параллельные прямые, а расстояние между меридианами пропорциональны соответствующим разностям долгот.
|
|
Основные этапы проектирования карты:
1-й этап: Осуществление геодезических измерений на поверхности Земли и их координатная привязка к конкретному референц-эллипсоиду.
2-й этап: Уменьшение размеров референц-эллипсоида до определённого масштаба с целью его дальнейшего развёртывания на плоскости, то есть создание условной эллипсоидальной модели Земли (глобуса) в масштабе, пригодном для изготовления карт. Это математическое преобразование эллипсоид – глобус сохраняет геометрическое подобие контуров изображений. Масштаб преобразования называется главным масштабом o будущей карты.
3-й этап: Выбор картографической проекции для развёртывания условного глобуса на плоскость и проектирование (преобразование глобус – карта). Из теории искажений известно, что при проектировании эллипсоида на плоскость масштаб o остаётся постоянным лишь на определённом множестве точек крты. В общем случае при удалении от этого множества масштаб изменяется и становится частным масштабом другого множества точек. Величина  называется увеличением масштаба.
называется увеличением масштаба.
Отношение частного масштаба к главному называется в картографии модулем параллели:

Меркаторской милей называется длина изображения одной минуты дуги меридиана ф в проекции меркатора, выраженная в линейных единицах в масштабе карты:

Линейный морской масштаб lф показывает, сколько морских миль содержится в одном сантиметре карты и представляет величину, обратную меркаторской миле:

ГЕОГРАФИЧЕСКИЕ КООРДИНАТЫ. Положение различных объектов на поверхности Земли может быть определено с помощью географических координат. Для отсчета координат на земной шар условно нанесена система точек и кругов (рис. 2). Введем ряд определений. Воображаемая прямая, вокруг которой происходит суточное вращение Земли, называется земной осью. Точки пересечения ее с поверхностью Земли называются географическими или истинными полюсами: северным Pn и южным Ps. При сечении шара плоскостью получается круг, а на поверхности шара образуется окружность. Если секущая плоскость проходит через центр шара, то круг имеет наибольшие размеры и называется большим. Круги, образующиеся от сечения шара плоскостями, не проходящими через его центр, называются малыми. Окружность большого круга QQ/, плоскость которого перпендикулярна земной оси, называется экватором. Он делит земной шар на северное и южное полушария. Окружности малых кругов, плоскости которых параллельны плоскости экватора, называются параллелями (рр/). Окружности больших кругов, плоскости которых проходят через ось Земли, называются географическими или истинными меридианами. Половину окружности меридиана PnMPs, заключенную между полюсами и проходящую через данную точку М, называют меридианом места. Меридиан PnGPs, проходящий через астрономическую обсерваторию в Гринвиче (Англия), носит название гринвичского (начального) меридиана. Гринвичский меридиан вместе с противоположным ему меридианом РnG/Ps делит земной шар на восточное и западное полушария.
В систему географических координат входят две сферические координаты: широта и долгота. Географической широтой какой-либо точки называется угол при центре Земли, составленный отвесной линией (земным радиусом), проведенной через данную точку, и плоскостью экватора (угол MOL, см. рис. 2). Широта измеряется дугой меридиана от экватора до параллели данной точки. Она отсчитывается к северу или югу от экватора от 0 до 90°. Если точка находится в северном полушарии, ее широте приписывается наименование N (северная), если в южном - S (южная). Широту обозначают греческой буквой "  " (фи).
" (фи).
Географической долготой какой-либо точки называется двугранный угол между плоскостью гринвичского меридиана и плоскостью меридиана данной точки (угол GOL, см. рис. 2). Долгота измеряется меньшей из дуг экватора между гринвичским меридианом и меридианом точки и отсчитывается от гринвичского меридиана к востоку или западу от 0 до 180°. Если точка находится в восточном полушарии, то долготе приписывают наименование Е (восточная), если в западном - W (западная). Долготу обозначают греческой буквой "  " (ламбда).
" (ламбда).
Разность широт и разность долгот. Географические координаты судна в результате сделанного перехода изменяются. Изменения широты и долготы судна называются разностями широт и долгот. Разность широт (РШ) двух точек на земной поверхности измеряется дугой меридиана, заключенной между параллелями этих точек. Наибольшее значение РШ может составить 180°, что соответствовало бы перемещению судна из одного полюса в другой. Если судно перемещалось по какой-либо одной параллели, то РШ равна 0°. Вычисленной РШ приписывается наименование к N или к S в зависимости от того, в каком направлении перемещалось судно. Разность долгот (РД) двух точек на земной поверхности измеряется меньшей из дуг экватора, заключенных между меридианами этих точек. Так как за разность долгот принимается всегда меньшая из дуг экватора, то ее значение не может превышать 180°. Если при сложении разноименных долгот получено значение, большее 180°, то за РД принимается дополнение до 360°. Такой случай может возникнуть при пересечении судном меридиана 180°. Вычисленному значению РД приписывается наименование к Е или W в зависимости от того, в каком направлении перемещалось судно. Если северной широте и восточной долготе условно приписать знак "плюс" (+), а южной широте знак "минус" (-), то значение РШ и РД можно вычислить по алгебраическим формулам:
· РШ = 2 - 1; РД = 2 - 1
(Здесь 2 и 2 - координаты конечной, а 1 и 1 - начальной точек плавания).
Знак результата, полученного при вычислении по формулам, покажет наименования РШ и РД. Если при вычислении РД берется дополнение до 360°, то наименование РД меняется. Чтобы не ошибиться в значении и наименовании вычисляемых РШ и РД, следует хорошо представлять взаимное расположение меридианов и параллелей на земном шаре (см. рис. 3, а и б). На практике бывает нужно найти координаты точки, в которую пришло судно, если заданы координаты пункта отхода, а также РШ и РД, характеризующие положение точки прихода. Вычисления можно произвести по алгебраическим формулам:
· 2 = 1 + РШ; 2 = 1 + РД
(Здесь 2 и 2 - координаты конечной, а 1 и 1 - начальной точек плавания).
14. Сущность шлюзования, состав гидроузлов. Плавание в верхнем и нижнем бьефе.
1) Шлюзование - комплекс технологических операций по вертикальному перемещению судов с уровня одного бьефа на уровень другого бьефа, связанных с работой механизмов шлюза (маневрированием воротами и затворами) и с наполнением или опорожнением камеры. В многоступенчатых шлюзах в процесс шлюзования дополнительно входят операции по переходу судов из камеры в камеру.
Шлюзование рек, увеличение глубин на отдельных участках рек путем возведения на них ряда гидроузлов, повышающих уровни воды по сравнению с имеющимися в естественных условиях. Шлюзование рек осуществляется в транспортных целях (для улучшения условий судоходства) и для комплексного использования водных ресурсов; в этих случаях в состав сооружаемых гидроузлов входят и судопропускные сооружения. Транспортное Шлюзование рек обеспечивается низконапорными гидроузлами с разборными плотинами, подпорные уровни которых не выходят из русла реки; применяется в случаях, когда пойменные земли застроены или представляют ценность в сельскохозяйственном отношении. При комплексном использовании водных ресурсов рек (например, энергетическо-транспортном, с регулированием речного стока водохранилищами) Шлюзование рек осуществляется как воднотранспортная часть комплекса, которая должна обеспечить заданные судоходные глубины на подходах к вышерасположенным гидроузлам.
2) Гидроузел, узел гидротехнических сооружений, группа гидротехнических сооружений, объединённых по расположению и условиям их совместной работы. В зависимости от основного назначения Гидроузел делятся на энергетические, водно-транспортные, водозаборные и др. Гидроузел чаще всего бывают комплексные, одновременно выполняющие несколько водохозяйственных функций.
Различают Гидроузел: низконапорные, - когда разность уровней воды верхнего и нижнего бьефов (напор) не превышает 10 м, - устраиваемые на равнинных реках, преимущественно в пределах их русла (главным образом для транспортных или энергетических целей), и на горных реках (для забора воды с целью получения электроэнергии или орошения земель); средненапорные (с напором 10-40 м) - на равнинных или предгорных участках рек, предназначенные главным образом для транспортно-энергетических, а также ирригационных целей (создаваемый ими подпор приводит к затоплению поймы реки в верхнем бьефе, образуя водохранилище, используемое для суточного и сезонного регулирования стока реки, осветления воды, борьбы с наводнениями и т.п.); высоконапорные (с напором более 40 м), служащие обычно для комплексных целей - энергетики, транспорта, ирригации и др.
Сооружения, входящие в состав Гидроузла, подразделяются на основные и вспомогательные. Основные сооружения, обеспечивающие нормальную работу Гидроузла, в свою очередь, делятся на общие (плотины, поверхностные и глубинные водосбросы, сооружения для удаления льда, шуги, наносов, регуляционные, сопрягающие и др.), обеспечивающие необходимые напор и ёмкость водохранилища, а также гидравлические условия, отвечающие измененному гидрологическому режиму реки (см. Гидротехнические сооружения), и специальные (ГЭС, судоходные шлюзы, судоподъёмники, рыбоходы, бревноспуски, плотоходы и т.д.), выполняющие те функции, для которых был создан Гидроузел К вспомогательным сооружениям относятся жилые, административно-хозяйственные и культурно-бытовые здания, сооружения водопровода и канализации, дороги и т.п. Временные сооружения (перемычки, склады строительных материалов, бетонные и арматурные заводы, мастерские, подъездные пути и пр.) обычно функционируют в период строительства Гидроузел, но некоторые из них иногда совмещают с постоянными (например, путём включения перемычек в состав плотины). Прочие сооружения - транзитные дороги и мосты, проходящие в зоне Гидроузел (например, пересечение Калининской ж. д. с каналом им. Москвы в районе расположения шлюза № 8), промышленные предприятия, возникшие на его базе и использующие его электроэнергию и т.п., связываются с Гидроузел главным образом территориально.
Место размещения Гидроузла, т. е. тех его сооружений, которые образуют т. н. напорный фронт, называется створом. Взаимное расположение основных сооружений, называемое компоновкой Гидроузел, представляет собой сложную инженерную задачу, решаемую с учётом эксплуатационных, строительных и технико-экономических требований. Большое разнообразие природных и местных условий не позволяет установить единые правила для размещения и компоновки Гидроузел Эти вопросы решаются каждый раз индивидуально с учётом всего комплекса условий, требований и характера взаимодействия сооружений.
3) Бьеф, или плес - так называется горизонтальная часть русла канализованных рек и каналов, отделяющаяся одна от другой изменениями уровня воды; в таковых местах находятся обыкновенно гидротехнические сооружения, служащие для прохода судов с одного уровня к другому, за которыми и образуются бьефы такой глубины, что суда могут в них плавать совершенно свободно. Назначая длину бьефов, следует помнить, что самое большое сбережение воды получится при нескольких более коротких бьефах на длине данного уклона канала, чем при одном длинном бьефе с многокамерным шлюзом. Каждый бьеф канала, для того, чтобы вода не могла подняться слишком высоко в канале, должен иметь удобное место для выпуска лишней воды. Когда длина бьефа более трех верст, то в таком случае надо делать несколько затворов для возможности осушать или исправлять канал по частям.
Эксперимент эксплуатации водосбросных гидротехнических сооружений свидетельствует о том, что наиболее — нередко подвергаются разрушению устройства нижнего бьефа. Правильно выявленные причины разрушения позволяют составить обоснованный проект ремонтных работ. Основными причинами разрушения устройств нижнего бьефа являются: повышенные гидродинамические нагрузки; неправильная эксплуатация (маневрирование затворами); попадание на водобой бетонных массивов продуктов скальных обрушений и других крупных габаритов, способных разорять бетонное крепление при длительном вращении в колодце; некачественное выполнение бетонных работ; недостаток конструкции; преждевременный пуск сооружения в эксплуатацию; непредвиденные явления и т. д.
Условия движения и стоянки судов у плотин осложняются неправильными течениями, возникающими вследствие сброса воды через плотину и ГЭС. В верхнем бьефе образуется течение, направленное в сторону плотины или здания гидроэлектростанции, а в нижнем бьефе - течение от сбросов воды через плотину и выхода ее из турбин ГЭС, зависящее от особенностей сооружений гидроузла. Колебания расхода воды, что затрудняет движение и стоянку судов. Управление судном у плотин требует повышенного внимания, так как имеются случаи срыва судов с якорей, навалов их друг на друга или посадки на грунт.
Условия судоходства во время строительства гидроузла зависят от организации и очередности строительных работ. Для строительства здания гидроэлектростанции 5 (рис. 46) и водосливной бетонной плотины 3 часть русла реки отгораживают перемычками 6, за которыми откачивают воду (затем уже ведут работы). Одновременно намывают земляную плотину 2 и сооружают шлюз 4 с верхним подходным судоходным каналом 1. В оставшейся при этом свободной части русла 7 скорость течения увеличивается, возникают свальные течения, затрудняющие судоходство.
После окончания строительства гидроэлектростанции весь расход пускают через турбины, а свободную часть русла перекрывают земляной плотиной. В этот период и в период завершения работ на гидроузле суда движутся через временный канал и шлюз.
По другой схеме гидростанцию и водосливную плотину строят на пойме и к ней в нижнем бьефе прорывают новое русло. Когда эти сооружения готовы, старое русло перекрывают земляной плотиной. Во время подготовки к перекрытию русла судоходство затруднительно, так как русло сужается из- за отсыпки каменных призм с обоих берегов и в связи с этим возрастает скорость течения.
15. Лаги гидродинамические, индукционные, гидроакустические, доплеровские и корреляционные.
В настоящее время на судах морского транспортного флота применяются индукционные, гидродинамические и радиодоплеровские лаги, измеряющие скорость относительно воды.
Индукционные лаги. Их действие основано на свойстве электромагнитной индукции. Согласно этому свойству при перемещении проводника в магнитном поле в проводнике индуктируется э.д.с., пропорциональная скорости его перемещения.
С помощью специального магнита под днищем судна создаётся магнитное поле. Объём воды под днищем, на который воздействует магнитное поле лага, можно рассматривать как множество элементарных проводников электрического тока, в которых индуктируется э.д.с.: значение такой э.д.с. позволяет судить о скорости перемещения судна.
Эксплуатируемые на судах морского флота индукционные лаги ИЭЛ-2 и ИЭЛ-2М построены по одинаковой схеме: они измеряют только продольную составляющую относительной скорости; выступающих за корпус судна частей нет. Серийно изготовляется в настоящее время только лаг ИЭЛ-2М. Лаг ИЭЛ-2 снят с производства в 1980 г. Лаг ИЭЛ-2М может устанавливаться на всех морских судах, включая ледоколы и суда на подводных крыльях.
Рекомендации по эксплуатации заключаются в следующем. С обрастанием корпуса судна лаги ИЭЛ-2 и ИЭЛ-2М начинают давать заниженные показания.
В схемы лагов ИЭЛ-2 и ИЭЛ-2М включён фильтр, усредняющий их показания. Поэтому при измерении судном скорости лаг фиксирует это изменение с некоторым запаздыванием.
Гидродинамические лаги. Принцип действия основан на измерении гидродинамического давления, создаваемого скоростным напором набегающего потока воды при движении судна.
Поправка гидродинамического лага, как правило, нестабильна. Основными причинами, обуславливающими её изменения во время плавания, являются дрейф судна, дифферент, обрастание корпуса, качка и изменением района плавания.
Рассчитать изменение поправки лага от влияния первых трёх причин не представляется возможным.
Абсолютные лаги. Под абсолютными понимаются лаги, измеряющие скорость судна относительно грунта. Разработанные в настоящее время абсолютные лаги являются гидроакустическими и делятся на доплеровские и корреляционные.
|
|
|

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!