Согласно заданным в таблице1 экспериментальным точкам строится экспериментальная характеристика переходного процесса. Исследуемый объект – двухканальный (канал: u-y и канал: f-y) по каналу регулирования (u-y) является объектом с самовыравниванием. Объекты с самовыравниванием аппроксимируют передаточными функциями с введением звена запаздывания.

Рис. 2. Переходная характеристика по управляющему каналу
 , (1.1)
, (1.1)
При Т1=Т2 и Т1≠Т2
где:
Коб – коэффициент передачи;
t - время запаздывания;
То – постоянная времени.
Для определения параметров объекта по управляющему каналу проведём касательную к экспериментальной переходной характеристике в точке перегиба, которая имеет координатами (tп; h(tп)). Далее определяем параметры передаточной функции по управляющему каналу:
Коб = hуст = 0,55; tо = 1,85 с; То = 10,55 с; h(tп) = 0,14; tп = 4,6 с

Аппроксимацию переходной характеристики объекта по управляющему каналу будем осуществлять с помощью 4,5,6 моделей. Наилучшей аппроксимирующей моделью будет считать ту, у которой ошибка аппроксимации будет наименьшей.
1. Если на графике переходной характеристики (рис. 2) просматривается характерный для s - образных кривых прямолинейный участок, то хорошую аппроксимацию дает модель 4, т.е. передаточная функция с одинаковыми постоянными времени, которая имеет вид[1]:
 (1.2)
(1.2)
Параметры модели определяем по методу Лукаса:
где,  ;
;

Таким образом, получили четвертую математическую модель ОУ:
2. Если истинная кривая (рис. 2) медленно приближается к установившемуся значению и координата ha ≤:0,8 kоб, то предпочтительней передаточная функция (1.3), модель 5,[1]:
 (1.3)
(1.3)
Существуют разные подходы к определению параметров. Часто принимают условие Ta1/Ta2 = 0,5, тогда подход следующий, берется координата 0,63 kоб и определяется время t1. Затем из t1 вычитаем время чистого запаздывания  .
.
t1=8,5 с = 0,8 с
t2= t1 - = 8,5 – 0,8 = 7,7 c Ta2 = 0,64*t2= 0,64*7,7 = 4,928 c
Ta1 =0,5 * Ta2 =0,5*4,928 = 2,464 c  = =0,8 c
= =0,8 c
Подставляя полученные параметры в (1.3) получим:

Модель 5 считается наилучшей если h(0,5*t2) ≥ 0,3*kоб (*)
где, h(0,5*t2) = 0,11 0,3*kоб = 0,165
следовательно h(0,5*t2) ≤ 0,3*kоб - условие не выполняется.
3. Если (*) не выполняется, то предпочтительней модель 6, передаточная функция которой представлена выражением (1.4),[3]]:
 (1.4)
(1.4)
Параметры определяются по методу Роточа с использованием номограмм[3]. Задача математического описания в этом случае заключается в поиске таких Т’а1, Т’а2 и , при которых кривая (1.4) максимально приближается к истинной экспериментальной кривой. Записывая аналитические выражения критерия приближения, получаем уравнения для выбора этих параметров. Для упрощения расчётов, в литературе предложена номограмма:
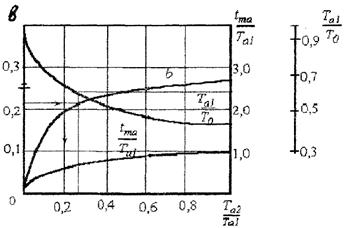
Рис. 3. Номограмма для определения параметров передаточных функций
По номограмме (рис.3.) можно найти Т ’ а1, Т ’ а2 по известным  и
и  . По известному значению находим значение
. По известному значению находим значение  , после чего определяем
, после чего определяем  ,
,  и, следовательно:
и, следовательно:




Подставляем рассчитанные значения в формулу (1.4):
Далее с помощью ППП «MATLAB» на ЭВМ строим переходные процессы полученных функций, рис 4.
Вычислим погрешности аппроксимации полученных передаточных функций по интегральному критерию по формуле:

где:
 - аппроксимирующая переходная характеристика;
- аппроксимирующая переходная характеристика;
 - заданная переходная характеристика.
- заданная переходная характеристика.

Выбираем передаточную функцию, имеющую наименьшую погрешность аппроксимации:
(1.5)
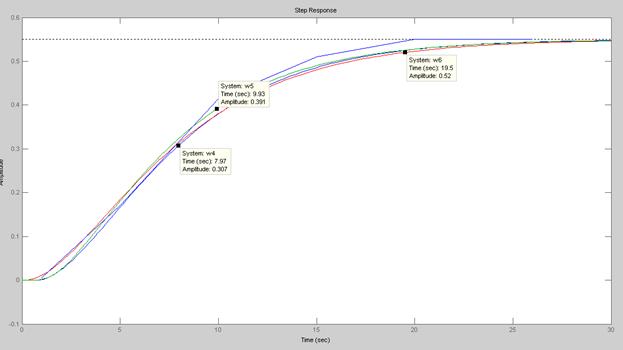
Рис. 4 Переходные характеристики моделей объекта управления по управляющему каналу и заданная экспериментально переходная характеристика по управляющему каналу.
1 -
2 -
3 -
4 - заданная экспериментально переходная характеристика по управляющему каналу






