В таблице 1 приведены независимые уравнения равновесия для плоской произвольной системы сил в виде
 (74)
(74)
В третьем уравнении (74) моменты относительно оси z заменены алгебраическими моментами относительно некоторой точки А, лежащей в плоскости действия сил. Записанные уравнения (74) называют первой (или основной) формой независимых уравнений равновесия для плоской произвольной системы сил. При записи уравнений равновесия в этой форме оси координат и моментную точку можно выбирать произвольно в плоскости действия сил.
Покажем далее, что уравнения равновесия для плоской произвольной системы сил можно записывать еще в двух эквивалентных формах.
Допустим теперь, что равны нулю суммы алгебраических моментов всех сил системы относительно двух произвольных точек А и В и сумма проекций сил на ось Ax, не перпендикулярную АВ (см. рис. 79):
 (75)
(75)
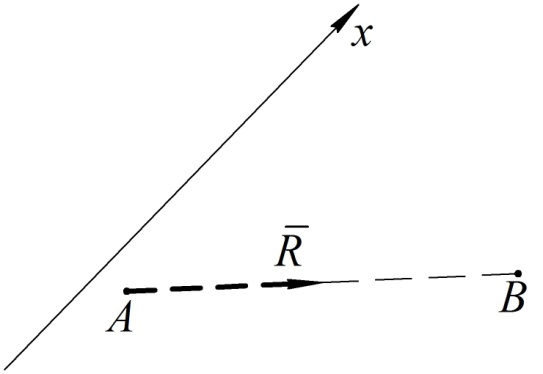
Рис. 79
Докажем, что при выполнении уравнений (75) плоская система сил будет уравновешенной. Выберем в качестве центра приведения точку А и покажем, что главный вектор системы сил и ее главный момент относительно точки А равны нулю. В силу первого уравнения (75) главный момент относительно точки А равен нулю:

и рассматриваемая система сил эквивалентна равнодействующей  , приложенной в точке А. По теореме Вариньона и согласно второму уравнению (75)
, приложенной в точке А. По теореме Вариньона и согласно второму уравнению (75)

Следовательно, либо  либо линия действия
либо линия действия  проходит через точку В. Допустим второе и обозначим равнодействующую штриховой линией на рис.78. Тогда, как видно из рисунка,
проходит через точку В. Допустим второе и обозначим равнодействующую штриховой линией на рис.78. Тогда, как видно из рисунка,
что противоречит третьему уравнению (75). Следовательно,  и система сил является уравновешенной.
и система сил является уравновешенной.
Уравнения (75) называют второй формой независимых уравнений равновесия для плоской произвольной системы сил. Здесь моментные точки А и В могут выбираться произвольно, а ось x, на которую вычисляются проекции сил в третьем уравнении, не должна быть перпендикулярна отрезку АВ.
Пусть теперь равны нулю суммы алгебраических моментов всех сил системы относительно трех точек А, В и С, не лежащих на одной прямой:
 (76)
(76)
Докажем, что при выполнении уравнений (76) плоская система сил тоже будет уравновешенной. Выберем в качестве центра приведения точку А и покажем, что главный вектор системы сил и ее главный момент относительно точки А равны нулю. В силу первого уравнения (76) главный момент относительно точки А равен нулю:
и рассматриваемая система сил эквивалентна равнодействующей , приложенной в точке А. По теореме Вариньона и согласно второму уравнению (76)
Следовательно, либо либо линия действия проходит через точку В. Допустим второе и обозначим равнодействующую штриховой линией на рис. 80.
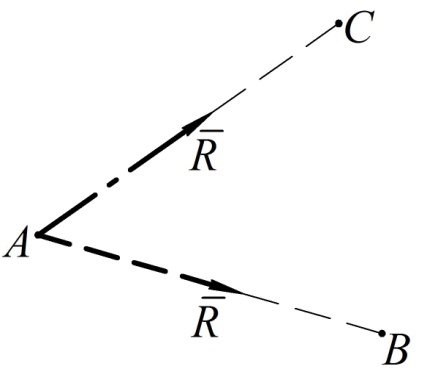
Рис. 80
В силу теоремы Вариньона и третьего уравнения (76)
 ,
,
и поскольку, в соответствии с предположением  то линия действия
то линия действия  должна проходить через точку С (штрих-пунктир на рис. 79). Это невозможно, так как точки В и С не лежат на одной прямой с точкой А. Получили противоречие, следовательно, и система сил является уравновешенной.
должна проходить через точку С (штрих-пунктир на рис. 79). Это невозможно, так как точки В и С не лежат на одной прямой с точкой А. Получили противоречие, следовательно, и система сил является уравновешенной.
Уравнения (76) называют третьей формой независимых уравнений равновесия для плоской произвольной системы сил. Здесь моментные точки А, В и С не должны лежать на одной прямой.
Прежде чем рассматривать пример решения задачи, изложим рекомендуемый порядок действий при решении типовых задач статики.
1. Выбрать объект равновесия (ОР). В качестве ОР следует выбирать тело (или систему тел), на которое действуют как заданные, так и искомые силы.
2. Обозначить на рисунке заданные внешние силы, действующие на ОР.
3. Мысленно отбросить связи, препятствующие свободному перемещению ОР, и заменить их действие соответствующими реакциями.
4. Определить вид полученной системы сил, выбрать оси координат и записать соответствующие виду системы сил независимые уравнения равновесия.
Пример 12
Однородный стержень АВ длиной l =2 м и весом Р= 50 н закреплен в точке А с помощью неподвижного цилиндрического шарнира. Концом В стержень опирается на гладкий горизонтальный пол (см. рис. 81). На стержень действуют пара сил с моментом М =20 н м и сила F =100 н, приложенная в центре тяжести стержня перпендикулярно стержню. Найти реакции пола и шарнира А, если α=  .
.
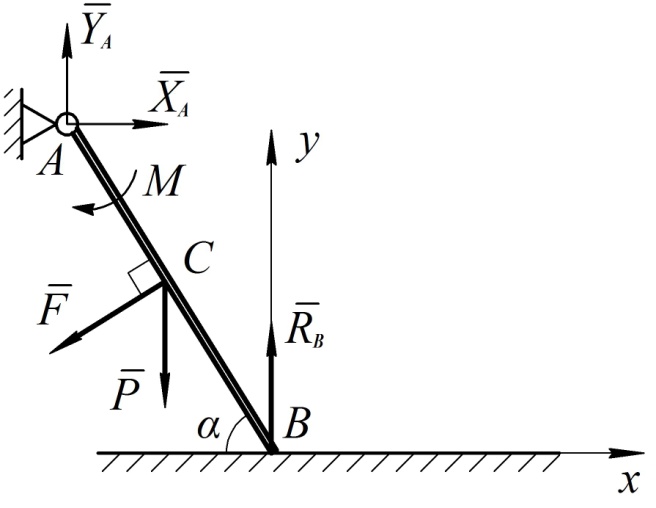
Рис. 81
Решение
Проведем решение в соответствии с рекомендованным выше порядком действий.
1. Выберем в качестве ОР стержень АВ.
2. Обозначим на рисунке заданные внешние нагрузки, действующие на стержень: пару сил с моментом М, силу  и силу тяжести
и силу тяжести  приложенную в центре тяжести стержня.
приложенную в центре тяжести стержня.
3. Реакцию цилиндрического шарнира в точке А разложим на две составляющих  реакцию пола
реакцию пола  направим перпендикулярно полу.
направим перпендикулярно полу.
4. Получили плоскую произвольную систему сил. Выберем две оси координат (см. рис. 81) и запишем для полученной системы сил три независимых уравнения равновесия. При записи третьего уравнения равновесия алгебраические моменты сил будем вычислять относительно точки А, так как через эту точку проходят линии действия двух неизвестных сил  В этом случае третье уравнение будет содержать меньше неизвестных величин.
В этом случае третье уравнение будет содержать меньше неизвестных величин.
Из полученных трех уравнений легко найти три неизвестные реакции. Из первого уравнения вычислим







