Независимые уравнения равновесия для различных систем сил
Если твердое тело под действием некоторой системы сил находится в равновесии, то для этой системы сил главный вектор и главный момент, вычисленный относительно произвольной точки О, равны нулю. Тогда из (69), (70) получим уравнения равновесия системы сил в векторной форме:
 (71)
(71)
 (72)
(72)
Если векторные равенства (71), (72) записать в проекциях на выбранные оси координат, то из двух векторных уравнений получим 6 алгебраических уравнений равновесия:
 (73)
(73)
В формулах (73) суммирование производится для всех сил системы, но для краткости записи у знака суммы не указаны границы изменения индекса суммирования k. Будем использовать такое упрощение записи и в дальнейшем.
Отметим, что записанные выше уравнения равновесия (73) являются независимыми только для систем сил наиболее общего вида – пространственных произвольных. Для более простых систем сил независимых уравнений равновесия будет меньше шести. Ниже в таблице приведены независимые уравнения равновесия для систем сил различного вида. Эти независимые уравнения помечены в таблице знаком (+). Отметим, что для плоских систем сил, расположенных в плоскости Oxy, вычисление моментов сил относительно оси z эквивалентно вычислению алгебраических моментов сил относительно точки, выбранной в плоскости Oxy.
| Уравнения
равновесия
Вид
системы сил
| 
| 
| 
| 
| 
| 
| Кол-во незави-симых ур-ий
|
| Простран-ственная
| Произвольная
| +
| +
| +
| +
| +
| +
|
|
Параллельная
(  ) )
| –
| –
| +
| +
| +
| –
|
|
| Сходящаяся
| +
| +
| +
| –
| –
| –
|
|
| Плоская
(в пл-ти OXY)
| Произвольная
| +
| +
| –
| –
| –
| +
|
|
Параллельная
( ) )
| –
| +
| –
| –
| –
| +
|
|
| Сходящаяся
| +
| +
| –
| –
| –
| –
|
|
Таблица 1. Независимые уравнения равновесия для различных систем сил
Докажем одну важную теорему статики.
Теорема Вариньона
Если система сил имеет равнодействующую, то векторный момент равнодействующей силы относительно какого-либо центра равен геометрической сумме векторных моментов всех сил системы, вычисленных относительно того же центра.
Доказательство
Пусть на твердое тело действует система сил  , имеющая равнодействующую
, имеющая равнодействующую  (см. рис. 78)
(см. рис. 78) 
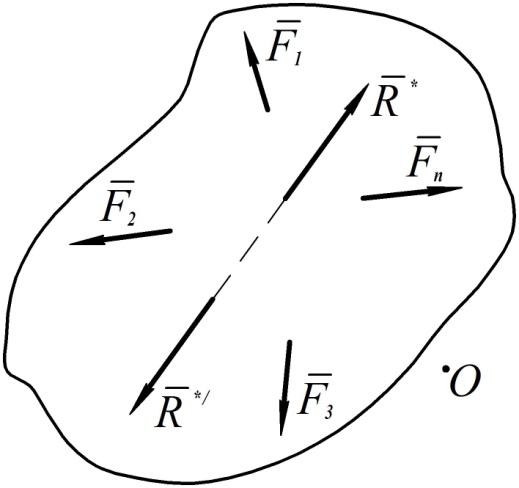
Рис. 78
Добавим к заданной системе сил уравновешивающую силу  , равную по величине, противоположно направленную и имеющую общую линию действия по отношению к равнодействующей силе . Тогда полученная система сил будет эквивалентна нулю
, равную по величине, противоположно направленную и имеющую общую линию действия по отношению к равнодействующей силе . Тогда полученная система сил будет эквивалентна нулю

и должна удовлетворять уравнениям равновесия. В частности, сумма векторных моментов сил этой системы относительно любой точки О равна нулю:

но

Тогда из предыдущей формулы получим

откуда следует утверждение теоремы:

Отметим, что аналогичное утверждение справедливо для алгебраических моментов и моментов сил относительно осей.






