и требованиями к качеству регулирования
Цель работы:
Улучшение статических и динамических характеристик системы за счет выбора законов управления.
Поставленная цель достигается в несколько этапов:
1. В пакете Simulink и CST создается модель объекта регулирования и определяется её статические и динамические характеристики.
2. Исследуется связь между показателями качества и различными законами управления.
3. На примере конкретной задачи изучаются возможности её решения с параллельным использованием пакетов Simulink и CST.
Теоретическое обоснование
Уравнение, описывающее П-регулятор:
y = y 0 + ky e(t),
где y 0 – начальное значение регулируемого воздействия; ky – общий коэффициент усиления; e(t) – отклонение регулируемой величины от заданного значения.
Уравнение, описывающее И-регулятор
 ,
,
где kи – коэффициент усиления интегрирующего элемента; Ти – постоянная времени интегрирования.
Уравнение, описывающее ПИ-регулятор
 .
.
Уравнение, описывающее ПД-регулятор:
 ,
,
где kд – коэффициент усиления дифференцирующего элемента; Тд – постоянная времени дифференцирования.
Уравнение, описывающее ПИД-регулятор
 .
.
Описание работы
Для объекта (двигателя постоянного тока) в m-файле создают математическую модель и исследуют её статические и динамические характеристики.
W1=tf(0.05,[0.25,1]) %Передаточная функция двигателя,
%определяющая электромагнитные процессы
W2=tf(5,[0.1,1]) %Передаточная функция двигателя,
%определяющая электромеханические процессы
Wos=tf(0.1,1) %Передаточная функция звена обратной связи
t=0:0.1:15; %Задание интервала времени
u=1*(t>0&t<15); %Задание управляющего сигнала
Td=-0.1*(t>5&t<10); %Задание возмущения
W=feedback(W1*W2,Wos) %Передаточная функция замкнутой системы
K=dcgain(W) %Коэффициент усиления замкнутой системы
H1=(1/K)*W %Передаточная функция замкнутой системы
%по управлению с учетом корректирующего множителя
H2=feedback(W2,(Wos*W1)) %Передаточная функция по возмущению
lsim(H1,u,t); %Определение переходного процесса
lsim(H2,u,t); %при произвольных входных сигналах.
[yu1,t,x]=lsim(H1,u,t); %Определение вектора выхода по управлению
[yv1,t,x]=lsim(H2,Td,t); %Определение вектора выхода по возмущению
figure(1) %Построение графика переходного процесса
plot(t,(yu1+yv1)),grid %разомкнутой системы.
Результаты моделирования представлены на рис. 7.1, из которого следует, что объект имеет значительную ошибку по возмущению (при приложении нагрузки выходная величина уменьшается в 2 раза).
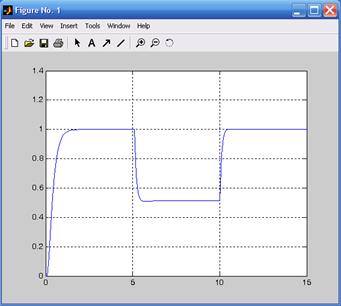
Рис. 7.1. Характеристики объекта при подаче возмущающих воздействий
На основании полученных передаточных функций объекта в пакете Simulink создана модель двигателя постоянного тока (рис. 7.2) и проведены её исследования.
Рис. 7.2. Математическая модель объекта в пакете Simulink
На рис. 7.2А представлена детализированная структурная схема объекта, охваченная обратной связью (Transfer Fcn, Transfer Fcn1, Gain2) с корректирующим множителем 1/ K = 4,1. На рис. 7.2Б представлен объект через передаточные функции по управлению H 1 (Transfer Fcn4) и по возмущению H 2 (Transfer Fcn5), а на рис. 7.2В представлена структурная схема объекта без учета обратной связи (Transfer Fcn2, Transfer Fcn3). Результаты моделирования объекта в пакете Simulink представлены на рис. 7.3, из которого следует эквивалентность структур на рис. 7.2А и 7.2В и незначительность влияния внутренней обратной связи на статические и динамические характеристики объекта (рис. 7.3). Из этого рисунка также следует идентичность представления объекта с помощью детализированной структурной схемы (рис. 7.2А) и с помощью передаточных функций по управлению и по возмущению (рис. 7.2.Б).
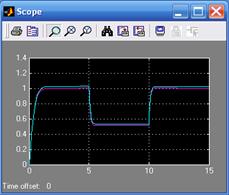
Рис. 7.3. Исследование в пакете Simulink переходных характеристик объекта
Для уменьшения статической ошибки регулирования объекта, представленного на рис. 7.4А, в схему введен интегральный регулятор (Transfer Fcn4), усилитель мощности (Transfer Fcn5) и обратная связь по выходной величине – угловой скорости (рис. 7.4Б).
Рис. 7.4. Структурная схема исследуемой системы с И-регулятором
Качество регулирования зависит от коэффициента усиления разомкнутой системы, который, при заданных параметрах системы, определяется коэффициентом усиления регулятора K. Существуют два пути определения K – по логарифмическим характеристикам и методом корневого годографа. Определение по логарифмическим характеристикам является более трудоемким процессом, так как требует построения семейства ЛАЧХ в функции коэффициента усиления регулятора и выбора нужных параметров регулятора путем анализа переходных процессов.
Определение K методом корневого годографа более информативно – с помощью команд MatLab строят корневой годограф, а затем на кривой корневого годографа определяют коэффициент усиления, расположение полюсов характеристического уравнения замкнутой системы, коэффициент демпфирования, перерегулирование и частоту среза системы. Этими данными характеризуется переходной процесс, что позволяет выбрать параметры регулятора.
На рис. 7.5 приведены траектории корней характеристического уравнения замкнутой системы при изменении коэффициента усиления K. Динамику системы определяет правая ветвь годографа, так как ее полюсы наиболее близко расположены к мнимой оси. При увеличении K полюсы из действительных становятся комплексными. Приемлемое значение K составляет 1,5 – 4,5. Выбираем K = 2.
W3=tf(2,[1,0]) %Передаточная функция регулятора
W4=tf(1,[0.01,1]) %Передаточная функция усилителя мощности
figure(2),bode(H1*W3*W4),grid %ЛАЧХ и ЛФЧХ
figure(3),rlocus(W3*W4*H1) %Построение корневого годографа
H1f=feedback(W3*W4*H1,1) %Передаточная функция замкнутой системы.
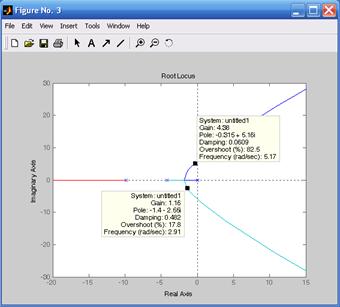
Рис. 7.5. Кривые корневого годографа исследуемой системы
Для K = 2 проведены исследования замкнутой системы регулирования с И-регулятором.
lsim(H1f,u,t); %Реакция замкнутой системы на
[yu2,t,x]=lsim(H1f,u,t); %произвольный сигнал по управлению
H2f=feedback(H2,(W3*W4*4.1*W1)) %Передаточная функция замкнутой
%системы по возмущению
lsim(H2f,u,t); %Реакция замкнутой системы на
[yv2,t,x]=lsim(H2f,Td,t); %произвольный сигнал по возмущению
figure(4),plot(t,(yu2+yv2),t,(yu1+yv1)),grid %Графики переходных
%процессов в разомкнутой(yu1+yv1) и замкнутой (yu2+yv2) системах.
На рис. 7.6 представлены логарифмические частотные характеристики разомкнутой системы с И-регулятором.
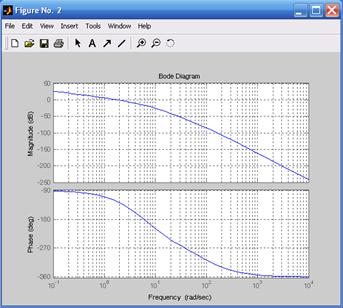
Рис. 7.6. Логарифмические частотные характеристики разомкнутой системы с И-регулятором
Переходные процессы представлены на рис. 7.7. Введение И-регулятора исключило статическую ошибку (кривая 2), но увеличило перерегулирование. Существует возможность улучшения динамических характеристик системы с помощью усложнения регулятора, например, с использованием ПИ-регулятора, который уменьшает по сравнению с И-регулятором, быстродействие системы и снижает динамическое влияние возмущающего воздействия.
Схема с ПИ-регулятором приведена на рис. 7.8.
W3=tf([0.25,1],[0.5,0]) %Передаточная функция ПИ-регулятора
W4=tf(1,[0.01,1]) %Передаточная функция усилителя мощности
H1f=feedback(W3*W4*H1,1); %Передаточная функция замкнутой
%системы по управлению
lsim(H1f,u,t); %Реакция замкнутой системы на
[yu3,t,x]=lsim(H1f,u,t); %произвольный сигнал по управлению
H2f=feedback(H2,W3*W4*4.1*W1); %Передаточная функция замкнутой
%системы по возмущению
lsim(H2f,u,t); %Реакция замкнутой системы на
[yv3,t,x]=lsim(H2f,Td,t); %произвольный сигнал по возмущению
Figure(5)
plot(t,(yu2+yv2),t,(yu1+yv1),t,(yu3+yv3)),grid.
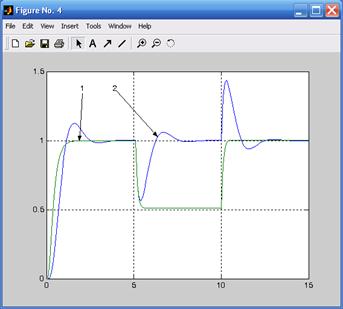
1 – разомкнутая система; 2 – замкнутая система с интегральным законом управления
Рис. 7.7. Переходные характеристики замкнутой системы с И-регулятором
А – разомкнутая система, Б – система с И-регулятором, В – система с ПИ-регулятором
Рис. 7.8. Структурные схемы разомкнутой и замкнутых систем
Результаты моделирования систем в пакете CST приведены на рис. 7.9.
ПИ-регулятор улучшает качество переходных процессов (кривая 3).
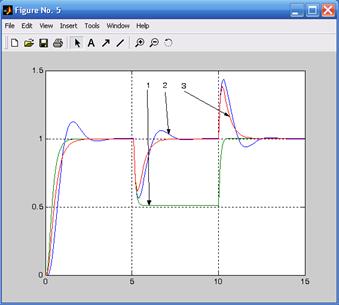
1 – разомкнутая система; 2 – замкнутая система с И-регулятором;
3 – замкнутая система с ПИ-регулятором
Рис. 7.9. Переходные характеристики замкнутой системы с И- и ПИ-регуляторами
Передаточная функция ПИД-регулятора представляет собой параллельное соединение усилительного, интегрирующего и дифференцирующего звеньев.
Структурная схема с ПИД-регулятором представлена на рис. 7.10. Результаты моделирования систем представлены на рис. 7.11.
W3=tf([1,4,1],[1.2,0.3,0]) %Передаточная функция регулятора
W4=tf(1,[0.01,1]) %Передаточная функция усилителя мощности
H1f=feedback(W3*W4*H1,1) %Передаточная функция замкнутой
%системы по управлению
lsim(H1f,u,t); %Реакция замкнутой системы на
[yu4,t,x]=lsim(H1f,u,t); %произвольный сигнал по управлению
H2f=feedback(H2, W3*W4*4.1*W1) %Передаточная функция замкнутой
%системы по возмущению
lsim(H2f,u,t); %Реакция замкнутой системы на
[yv4,t,x]=lsim(H2f,Td,t); %произвольный сигнал по возмущению
Figure(6)
plot(t,(yu2+yv2),t,(yu1+yv1),t,(yu4+yv4),t,(yu3+yv3)),grid.
 А – разомкнутая система, Б – система с И-регулятором,
А – разомкнутая система, Б – система с И-регулятором,
В – система с ПИ-регулятором, Г - система с ПИД-регулятором
Рис. 7.10. Структурные схемы разомкнутой и замкнутых систем
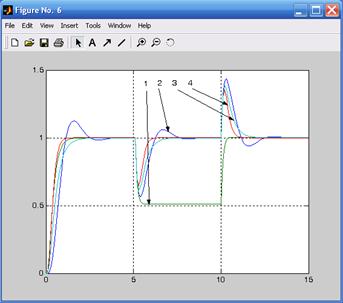
1 – разомкнутая система; 2 – замкнутая система с И-регулятором;
3 – замкнутая система с ПИ–регулятором; 4 – замкнутая система с ПИД-регулятором
Рис. 7.11. Переходные характеристики исследуемой системы с разными регуляторами
Качество переходных процессов зависит от параметров П-, И-, ПИ-, ПИД-регуляторов.
Задание
1. По заданным параметрам объекта в пакете CST написать программу, определяющую его переходные характеристики по управлению и по возмущению.
2. По рассчитанной передаточной функции в пакете Simulink составить структурную схему объекта и определить его переходные характеристики.
3. В пакете Simulink построить систему с И-регулятором. Определить коэффициент усиления регулятора методом корневого годографа, построить логарифмические частотные характеристики разомкнутой системы.
4. Исследовать систему с И-регулятором в пакетах CST и Simulink.
5. В пакете Simulink построить систему с ПИ-регулятором. Исследовать систему в пакетах CST и Simulink. Найти передаточную функцию ПИ-регулятора, обеспечивающую необходимое качество переходных процессов.
6. В пакете Simulink построить систему с ПИД-регулятором. Исследовать систему в пакетах CST и Simulink. Найти передаточную функцию ПИД-регулятора, обеспечивающую необходимое качество переходных процессов.
Содержание отчета
1. Структурные схемы статической системы (рис. 7.1), систем с И-, ПИ-, ПИД-регуляторами (рис. 7.2, 7.4, 7.8, 7.11), выполненные в Simulink.
2. Расчеты статической системы, систем с И-, ПИ-, ПИД-регуляторами, выполненные в System Toolbox.
3. Результаты моделирования.
4. Логарифмические частотные характеристики систем с И-, ПИ-, ПИД-регуляторами.
5. Корневые годографы систем с И-, ПИ-, ПИД-регуляторами.
Контрольные вопросы
1. Как изменятся динамические характеристики системы после ввода И-регулятора?
2. Как изменятся динамические характеристики системы после ввода ПИ-регулятора?
3. Как изменятся динамические характеристики системы после ввода ПИД-регулятора?
4. Запишите передаточную функцию идеального ПИД-регулятора.
5. Запишите передаточную функцию реального ПИД-регулятора.
6. Как по кривой корневого годографа определить динамические показатели замкнутой системы?
7. Как из физических соображений обосновать повышение быстродействия системы после ввода ПИ-регулятора?
8. Как из математических соображений обосновать повышение быстродействия системы после ввода ПИ-регулятора?
Лабораторная работа № 8






