

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Топ:
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
В данной лекции рассматриваются следующие вопросы:
1. Кинематика точки. Введение в кинематику.
2. Способы задания движения точки.
3. Вектор скорости точки.
4. Вектор ускорения точки.
5. Определение скорости и ускорения точки при координатном способе задания движения точки.
6. Определение скорости и ускорения точки при естественном способе задания движения точки. Касательное и нормальное ускорение точки.
7. Некоторые частные случаи движения точки.
Изучение данных вопросов необходимо в дальнейшем для динамики движения материальной точки, динамики относительного движения точки, динамики вращательного движения точки, для решения задач в дисциплинах «Теория машин и механизмов» и «Детали машин».
Кинематика точки. Введение в кинематику.
Кинематикой называется раздел механики, в котором изучаются геометрические свойства движения тел без учета их инертности (массы) и действующих на них сил.
Под движением мы понимаем в механике изменение, с течением времени положения данного тела в пространстве по отношению к другим телам.
Для определения положения движущегося тела (или точки) в разные моменты времени с телом, по отношению к которому изучается движение, жестко связывают какую-нибудь систему координат, образующую вместе с этим телом систему отсчета.
Изображать систему отсчета будем в виде трех координатных осей (не показывая тело, с которым они связаны).
Движение тел совершается в пространстве с течением времени. Пространство в механике мы рассматриваем, как трехмерное евклидово пространство.
Время является скалярной, непрерывно изменяющейся величиной. В задачах кинематики время  принимают за независимое переменное (аргумент). Все другие переменные величины (расстояния, скорости и т. д.) рассматриваются как изменяющиеся с течением времени, т, е. как функции времени .
принимают за независимое переменное (аргумент). Все другие переменные величины (расстояния, скорости и т. д.) рассматриваются как изменяющиеся с течением времени, т, е. как функции времени .
|
|
Для решения задач кинематики надо, чтобы изучаемое движение было как-то задано (описано).
Кинематически задать движение или закон движения тела (точки) - значит задать положение этого тела (точки) относительно данной системы отсчета в любой момент времени.
Основная задача кинематики точки и твердого тела состоит в том, чтобы, зная закон движения точки (тела), установить методы определения всех кинематических величин, характеризующих данное движение.
Способы задания движения точки
Для задания движения точки можно применять один из следующих трех способов:
1) векторный, 2) координатный, 3) естественный.
1. Векторный способ задания движения точки.
Пусть точка М движется по отношению к некоторой системе отсчета Oxyz. Положение этой точки в любой момент времени можно определить, задав ее радиус-вектор  , проведенный из начала координат О в точку М (рис. 1).
, проведенный из начала координат О в точку М (рис. 1).
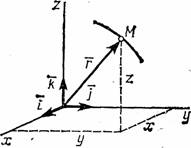
Рис.1
При движении точки М вектор будет с течением времени изменяться и по модулю, и по направлению. Следовательно, является переменным вектором (вектором-функцией), зависящим от аргумента :
 .
.
Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор и найти положение движущейся точки.
Геометрическое место концов вектора , т.е. годограф этого вектора, определяет траекторию движущейся точки.
2. Координатный способ задания движения точки.
Положение точки можно непосредственно определять ее декартовыми координатами х, у, z (рис.1), которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т. е. знать зависимости
 ,
,  ,
,  .
.
|
|
Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения.
Чтобы получить уравнение траектории надо из уравнений движения исключить параметр  .
.
Нетрудно установить зависимость между векторным и координатным способами задания движения.
Разложим вектор на составляющие по осям координат:

где  - проекции вектора на оси;
- проекции вектора на оси;  – единичные векторы направленные по осям, орты осей.
– единичные векторы направленные по осям, орты осей.
Так как начало вектора находится в начале координат, то проекции вектора будут равны координатам точки M. Поэтому

Пример 1. Движение точки задано уравнениями

Рис.2
Чтобы исключить время, параметр t, найдём из первого уравнения  из второго
из второго  Затем возведём в квадрат и сложим. Так как
Затем возведём в квадрат и сложим. Так как  получим
получим  Это уравнение эллипса с полуосями 2 см и 3 см (рис.2).
Это уравнение эллипса с полуосями 2 см и 3 см (рис.2).
Начальное положение точки M 0 (при t =0) определяется координатами 

Через 1 сек. точка будет в положении M 1 с координатами

Примечание.
Движение точки может быть задано с помощью и других координат. Например, цилиндрических или сферических. Среди них будут не только линейные размеры, но и углы. При необходимости, с заданием движения цилиндрическими и сферическими координатами можно познакомиться по учебникам.
3. Естественный способ задания движения точки.
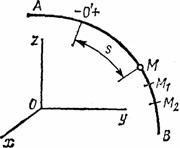
Рис.3
Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис.3) Выберем на этой траектории какую-нибудь неподвижную точку О', которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси).
Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s, которая равна расстоянию от точки О' до точки М, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка М перемещается в положения M 1, М 2,.... следовательно, расстояние s будет с течением времени изменяться.
Чтобы знать положение точки М на траектории в любой момент времени, надо знать зависимость
 .
.
Уравнение выражает закон движения точки М вдоль траектории.
|
|
Пример 2. Точка движется по прямой линии, по закону  (рис. 4).
(рис. 4).
Рис.4
В начале движения, при  Положение точки M 0 называется начальным положением. При
Положение точки M 0 называется начальным положением. При 
Конечно, за 1 сек. точка прошла расстояние M 0 M 1 = 2см.Так что s – это не путь пройденный точкой, а расстояние от начала отсчёта до точки.
Вектор скорости точки
Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки.
Известно, что при движении точки по прямой линии с постоянной скоростью, равномерно, скорость её определяется делением пройденного расстояния s на время:  . При неравномерном движении эта формула не годится. Введем сначала понятие о средней скорости точки за какой-нибудь промежуток времени. Пусть движущаяся точка находится
. При неравномерном движении эта формула не годится. Введем сначала понятие о средней скорости точки за какой-нибудь промежуток времени. Пусть движущаяся точка находится
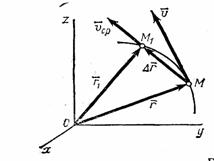
Рис. 5
в момент времени t в положении М, определяемом радиусом-вектором , а в момент  приходит в положение M 1 определяемое вектором
приходит в положение M 1 определяемое вектором  (рис.5). Тогда перемещение точки за промежуток времени
(рис.5). Тогда перемещение точки за промежуток времени  определяется вектором
определяется вектором  который будем называть вектором перемещения точки. Из треугольника ОММ 1 видно, что
который будем называть вектором перемещения точки. Из треугольника ОММ 1 видно, что  ; следовательно,
; следовательно,  .
.
Отношение вектора перемещения точки к соответствующему промежутку времени дает векторную величину, называемую средней по модулю и направлению скоростью точки за промежуток времени  :
:
 .
.
Скоростью точки в данный момент времени называется векторная величина  , к которой стремится средняя скорость
, к которой стремится средняя скорость  при стремлении промежутка времени к нулю:
при стремлении промежутка времени к нулю:
 ,
,  .
.
Итак, вектор скорости точки в данный момент времени равен первой производной от радиуса-вектора точки по времени.
Так как предельным направлением секущей ММ 1 является касательная, то вектор скорости точки в данный момент времени направлен по касательной к траектории точки в сторону движения.
Определение скорости точки при координатном способе задания движения
Вектор скорости точки  , учитывая, что
, учитывая, что  ,
,  ,
,  , найдем:
, найдем:
 ,
,  ,
,  .
.
Таким образом, проекции скорости точки на координатные оси равны первым производным от соответствующих координат точки по времени.
Зная проекции скорости, найдем ее модуль и направление (т.е. углы  ,
,  ,
,  , которые вектор образует с координатными осями) по формулам
, которые вектор образует с координатными осями) по формулам
|
|
 ;
;
 ,
,  ,
,  .
.
Итак, численная величина скорости точки в данный момент времени равна первой производной от расстояния (криволинейной координаты) s точки по времени.
Направлен вектор скорости по касательной к траектории, которая нам наперед известна.
Определение скорости точки при естественном способе задания движения
Величину скорости можно определить как предел ( – длина хорды
– длина хорды  ):
):

где  – длина дуги . Первый предел равен единице, второй предел – производная
– длина дуги . Первый предел равен единице, второй предел – производная 
Следовательно, скорость точки есть первая производная по времени от закона движения:

Направлен вектор скорости, как было установлено ранее, по касательной к траектории. Если величина скорости в данный момент будет больше нуля, то вектор скорости направляется в положительном направлении
Вектор ускорения точки
Ускорением точки называется векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки.
Пусть в некоторый момент времени движущаяся точка находится в положении М и имеет скорость , а в момент приходит в положение  и имеет скорость
и имеет скорость  (рис. 6).
(рис. 6).
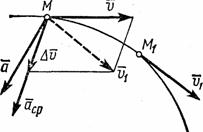
Рис.6
Тогда за промежуток времени скорость точки получает приращение  . Для построения вектора
. Для построения вектора  отложим от точки М вектор, равный , и построим параллелограмм, в котором диагональю будет
отложим от точки М вектор, равный , и построим параллелограмм, в котором диагональю будет  , a одной из сторон
, a одной из сторон  . Тогда, очевидно, вторая сторона и будет изображать вектор . Заметим, что вектор всегда направлен в сторону вогнутости траектории.
. Тогда, очевидно, вторая сторона и будет изображать вектор . Заметим, что вектор всегда направлен в сторону вогнутости траектории.
Отношение приращения вектора скорости к соответствующему промежутку времени определяет вектор среднего ускорения точки за этот промежуток времени:
 .
.
Вектор среднего ускорения имеет то же направление, что и вектор , т. е. направлен в сторону вогнутости траектории.
Ускорением точки в данный момент времени t называется векторная величина  , к которой стремится среднее ускорение
, к которой стремится среднее ускорение  при стремлении промежутка времени к нулю: Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени.
при стремлении промежутка времени к нулю: Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени.
Найдем, как располагается вектор по отношению к траектории точки. При прямолинейном движении вектор направлен вдоль прямой, по которой движется точка. Если траекторией точки является плоская кривая, то вектор ускорения , так же как и вектор , лежит в плоскости этой кривой и направлен в сторону ее вогнутости. Если траектория не является плоской кривой, то вектор направлен в сторону вогнутости траектории и лежит в плоскости, проходящей через касательную к траектории в точке М и прямую, параллельную касательной в соседней точке M 1 (рис. 4). В пределе, когда точка М стремится к М, эта плоскость занимает положение так называемой соприкасающейся плоскости, т.е. плоскости, в которой происходит бесконечно малый поворот касательной к траектории при элементарном перемещении движущейся точки. Следовательно, в общем случае вектор ускорения лежит в соприкасающейся плоскости и направлен в сторону вогнутости кривой.
|
|
Определение ускорения при координатном способе задания движения
Вектор ускорения точки  в проекции на оси получаем:
в проекции на оси получаем:
 ,
,  ,
, 
или
 ,
,  ,
,  ,
,
т.е. проекция ускорения точки на координатные оси равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление ускорения найдутся из формул
 ;
;
 ,
,  ,
,  ,
,
где  ,
,  ,
,  - углы, образуемые вектором ускорения с координатными осями.
- углы, образуемые вектором ускорения с координатными осями.
Пример 3. Движение точки задано уравнениями  .
.
Из первого уравнения  . Подставив во второе, получим уравнение траектории:
. Подставив во второе, получим уравнение траектории: 
Это уравнение параболы. В начале движения, при  , точка находилась на самом верху, в положении M 0 (
, точка находилась на самом верху, в положении M 0 ( ).
).
А, например, при t =0,5 c она будет в положении M с координатами 

Проекции скорости на оси 
При 

И модуль скорости 
Составляющие скорости по осям и вектор её показаны в масштабе на рис. 7.
Рис.7
Проекции ускорения 
 . Так как проекция вектора ускорения на ось x равна нулю, а на ось y – отрицательна, то вектор ускорения направлен вертикально вниз, и величина его постоянна, не зависит от времени.
. Так как проекция вектора ускорения на ось x равна нулю, а на ось y – отрицательна, то вектор ускорения направлен вертикально вниз, и величина его постоянна, не зависит от времени.
Определение ускорения при естественном способе задания движения. Касательное и нормальное ускорение точки
При естественном способе задания движения вектор определяют по его проекциям на оси  , имеющие начало в точке М и движущиеся вместе с нею (рис.8). Эти оси, называемые осями естественного трехгранника (или скоростными (естественными) осями), направлены следующим образом: ось
, имеющие начало в точке М и движущиеся вместе с нею (рис.8). Эти оси, называемые осями естественного трехгранника (или скоростными (естественными) осями), направлены следующим образом: ось  - вдоль касательной к траектории в сторону положительного отсчета расстояния s; ось
- вдоль касательной к траектории в сторону положительного отсчета расстояния s; ось  - по нормали, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории; ось
- по нормали, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории; ось  - перпендикулярно к первым двум так, чтобы она образовала с ними правую тройку. Нормаль , лежащая в соприкасающейся плоскости(вплоскости самой кривой, если кривая плоская), называетсяглавной нормалью, а перпендикулярная к ней нормаль - бинормалью.
- перпендикулярно к первым двум так, чтобы она образовала с ними правую тройку. Нормаль , лежащая в соприкасающейся плоскости(вплоскости самой кривой, если кривая плоская), называетсяглавной нормалью, а перпендикулярная к ней нормаль - бинормалью.
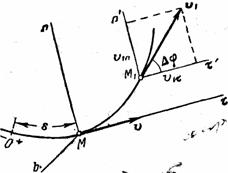
Рис.8
Было показано, что ускорение точки лежит в соприкасающейся плоскости, т.е. в плоскости  ; следовательно, проекция вектора на бинормаль равна нулю (
; следовательно, проекция вектора на бинормаль равна нулю ( ).
).
Вычислим проекции , на две другие оси. Пусть в моментвремени t точка находится в положении М и имеет скорость , a в момент  приходит в положение М 1 и имеет скорость .
приходит в положение М 1 и имеет скорость .
Тогда по определению
 .
.
Перейдем в этом равенстве от векторов к их проекциям на оси  и , проведенные в точке М (рис.8). Тогда на основании теоремы о проекции суммы (или разности) векторов на ось получим:
и , проведенные в точке М (рис.8). Тогда на основании теоремы о проекции суммы (или разности) векторов на ось получим:
 ,
,  .
.
Учитывая, что проекция вектора на параллельные оси одинаковы, проведем через точку М 1 оси  параллельные
параллельные  и обозначим угол между направлением вектора и касательной через
и обозначим угол между направлением вектора и касательной через  . Этот угол между касательными к кривой в точках М и М 1называется углом смежности.
. Этот угол между касательными к кривой в точках М и М 1называется углом смежности.
Напомним, что предел отношения угла смежности к длине дуги  определяет кривизну k кривой в точке М. Кривизна же является величиной, обратной радиусу кривизны
определяет кривизну k кривой в точке М. Кривизна же является величиной, обратной радиусу кривизны  в точке М. Таким образом,
в точке М. Таким образом,
 .
.
Обращаясь теперь к чертежу (рис.9), находим, что проекции векторов  и
и  на оси будут равны:
на оси будут равны:
 ,
,
где и - численные величины скорости точки в моменты и .
Следовательно,
 .
.
Заметим что при  точка М 1 неограниченно приближается к М и одновременно
точка М 1 неограниченно приближается к М и одновременно
 .
.
Тогда, учитывая, что в пределе  , получим для
, получим для  выражение
выражение
 .
.
Правую часть выражения  преобразуем так, чтобы в нее вошли отношения, пределы которых нам известны. Для этого умножим числитель и знаменатель дроби, стоящей под знаком предела, на
преобразуем так, чтобы в нее вошли отношения, пределы которых нам известны. Для этого умножим числитель и знаменатель дроби, стоящей под знаком предела, на  . Тогда будем иметь
. Тогда будем иметь
 ,
,
так как пределы каждого из стоящих в скобке сомножителей при равны:

Окончательно получаем:
 .
.
Итак, мы доказали, что проекция ускорения точки на касательную равна первой производной от численной величины скорости или второй производной от расстояния (криволинейной координаты) s no времени, а проекция ускорения на главную нормаль равна квадрату скорости деленному на радиус кривизны траектории в данной точке кривой; проекция ускорения на бинормаль равна нулю ( ). Эти результаты выражают собою одну из важных теорем кинематики точки.
). Эти результаты выражают собою одну из важных теорем кинематики точки.
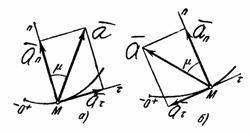
Рис.9
Отложим вдоль касательной и главной нормали векторы  и
и  , численно равные и (рис. 9). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая будет всегда направлена в сторону вогнутости кривой (величина a всегда положительна), а составляющая может быть направлена или в положительном, или в отрицательном направлении оси в зависимости от знака проекции (см. рис.9, а и б).
, численно равные и (рис. 9). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая будет всегда направлена в сторону вогнутости кривой (величина a всегда положительна), а составляющая может быть направлена или в положительном, или в отрицательном направлении оси в зависимости от знака проекции (см. рис.9, а и б).
Вектор ускорения точки изображается диагональю параллелограмма, построенного на составляющих и . Так как эти составляющие взаимно перпендикулярны, то по модулю:
 .
.
|
|
|

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!