Введение
Моделирование [4] – это замена объекта (оригинала) и фиксация и изучение его свойств путем исследования модели.
Процесс моделирования [4] может быть разбит на следующие этапы:
1. Формулировка цели моделирования;
2. Разработка концептуальной модели;
3. Подготовка исходных данных;
4. Разработка математической модели;
5. Выбор метода моделирования;
6. Выбор средств моделирования;
7. Разработка программной модели;
8. Проверка адекватности и корректировка модели;
9. Планирование машинных экспериментов;
10. Моделирование;
11. Анализ результатов моделирования.
В ходе курсовой работы необходимо смоделировать систему управления приводом робота-манипулятора. Целью моделирования является создание эффективной, адекватной модели. При первом рассмотрении системы можно заметить следующее:
На вход системы поступает угол поворота, который, скорее всего, создается механическим усилием;
Этот сигнал с учетом ошибки преобразуется в электрическое напряжение;
Сигнал усиливается, корректируется и направляется на двигатель;
Выходной сигнал двигателя поступает на объект – робот-манипулятор.
В качестве средства моделирования будем использовать среду Matlab 6.5.0.1. Matlab обладает мощным встроенным языком и прочими средствами для создания эффективной модели системы.
Оптимизация системы
Необходимо подобрать параметры корректирующих устройств и коэффициент усиления электронного усилителя такими, чтобы выходной сигнал удовлетворял следующим показателям качества:
максимальное перерегулирование – не более 1%;
время нарастания – не более 1с;
длительность переходного процесса – не более 3с.
Модель системы, созданная при помощи Simulink, представлена на рис 1.
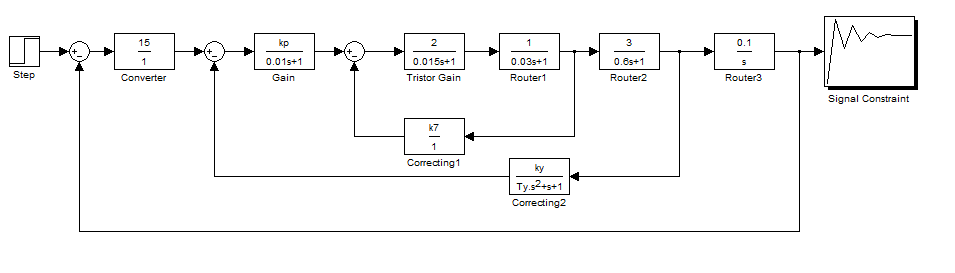
Рисунок 1 - Модель САУ
Для определения параметров проведём оптимизацию системы при помощи блока NCD OutPort. Начальные значения параметров придаются 1. Настройка параметров показана на рис. 2.
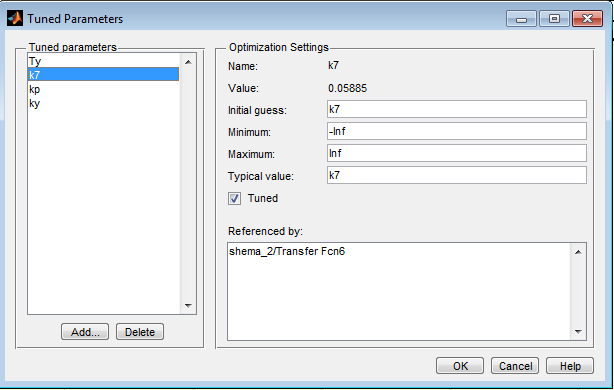
Рисунок 2 - Настройка параметров оптимизации
Задавать требования к переходному процессу можно непосредственно в окне блока NCD OutPort, передвигая красные линии, или ввести их значения в окне Step Response, как на рис. 3.

Рисунок 3 - Настройка характеристик переходного процесса
Приступаем к процессу оптимизации, нажав кнопку Start. Ход оптимизации показан на рис. 4, кривой зелёного цвета соответствуют оптимальные значения настраиваемых параметров.
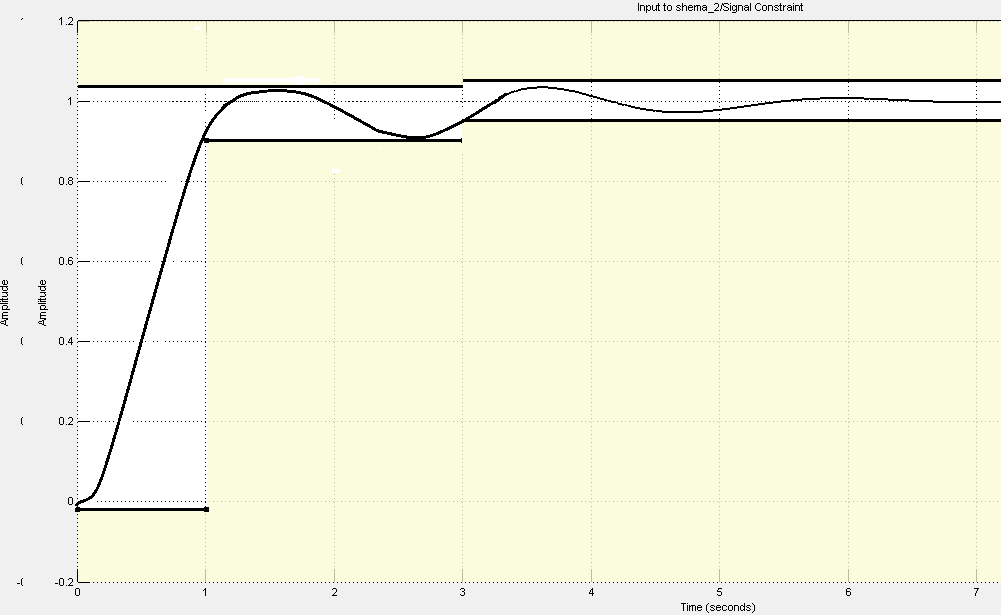
Рисунок 4 - Процесс оптимизации системы
Полученные оптимизированные значения параметров:

Цифровая модель САУ
Для получения цифровой модели САУ используем функцию c2d (sys, Ts, method). Эта функция имеет следующие параметры:
Sys – система, дискретизацию которой необходимо провести;
Ts - время квантования;
method –строковая константа, обозначающая метод дискретизации. Например, ' tustin ' –преобразование Тастина с использованием квантования по уровню.
Рассмотрим преобразование Тастина более подробно на примере корректирующего устройства системы, передаточная функция которого имеет вид:

Формула Тастина для перехода ПФ к z-преобразованию:
С учетом формулы Тастина проведем z-преобразование корректирующего устройства для стандартного времени квантования T0=0,025

Вычисления в Matlab с помощью функции c2d дают тот же результат:
Transfer function:
0.001496 z^2 + 0.002991 z + 0.001496
------------------------------------
z^2 - 1.564 z + 0.5745
Sampling time: 0.025
Как известно изображения входной и выходной величины блока связаны передаточной функцией:

Отсюда имеем

Разностное уравнение:

Эквивалентная схема САУ представлена на рис. 8.
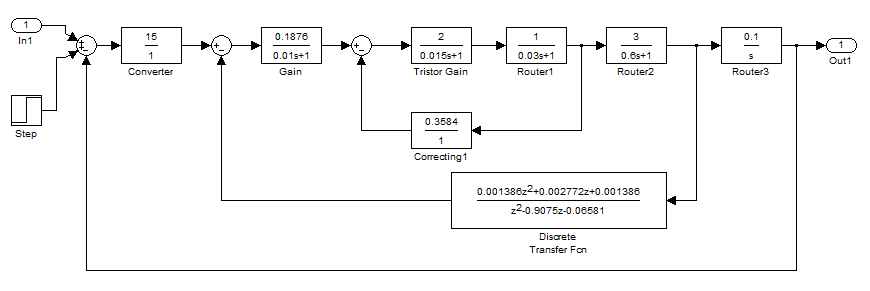
Рисунок 8 - Эквивалентная схема САУ
По разностному уравнению можно построить не только эквивалентную схему корректирующего устройства, но и подставляя конкретные k получить систему реккурентных соотношений, по которой определить значения выходного сигнала в зависимости от входного для каждого периода квантования и построить переходную функцию. Для построения переходной функции в нашем случае используем Matlab. Результат сравнения переходных функций изображен на рис. 9.
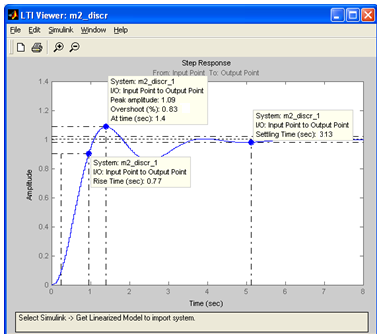
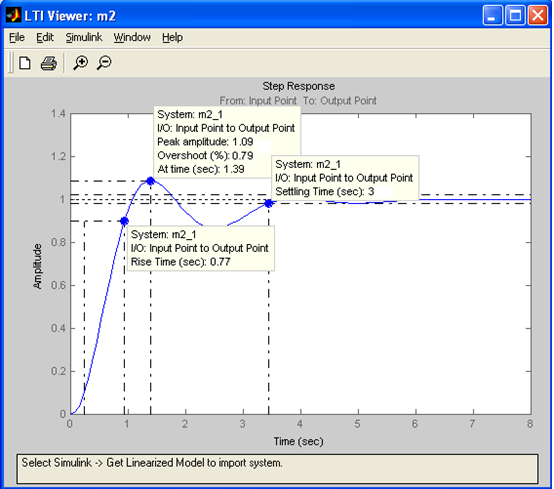
Рисунок 9 - Сравнение переходных функций систем для цифрового (вверху) и аналогового (внизу) входных сигналов
Характеристики переходной функции для цифрового сигнала: время нарастания – 0.77с, перерегулирование –0.83%, длительность переходного процесса – 5.13с. Эти характеристики отличаются от таковых, полученных в п. 2, следовательно, дискретизация системы вносит неточность в сигнал.
Заключение
В ходе курсовой работы была смоделирована САУ приводом робота-манипулятора. Разработаны две модели для реакции на аналоговый и цифровой входные сигналы. Модель позволяет предсказать поведение системы при воздействии сигналов разного характера, определить характеристики САУ: передаточную функцию, переходную функцию, АФХ, АЧХ, ФЧХ, запасы устойчивости и прочие характеристики. Модель разработана средствами Matlab 6.5.0.1. Модель полностью удовлетворяет всем требованиям к ней.
Литература
1. Дорф, Р. Современные системы управления / Р. Дорф,
Р. Бишоп. – М.: Лаборатория Базовых Знаний, 2002. – 832с.
2. Дьяконов, В. MATLAB. Анализ, идентификация и моделирование систем. Специальный справочник / В. Дьяконов, В. Круглов – СПб.: Питер, 2002. – 448с.
3. Бакаев, В.Н. Теория автоматического управления. Учебное пособие / В.Н. Бакаев. - Вологда: ВоГТУ, 2009. – 56 с.
Приложение А
Расчеты в среде Matlab
>>[num,den]=linmod('shema_3');
tf(num,den)
Transfer function:
0. 3 s^2 + 4.38 s + 4.38
-------------------------------------------------------------------
0.002 s^5 +0.1 s^4 +1.4 s^3 + 3.4 s^2 + 4.3 s
>> [A,B,C,D]=tf2ss(num,den)
A =
1.0e+007 *
-0.0000 -0.0033 -0.1733 -3.9403 -9.6332 -6.6908 0
1 0 0 0 0 0 0
0 1 0 0 0 0 0
0 0 1 0 0 0 0
0 0 0 1 0 0 0
0 0 0 0 1 0 0
0 0 0 0 0 1 0
B =
C =
1.0e+007 *
0.0000 -0.0000 -0.0000 -0.0000 0.0625 5.7901 5.7901
D =
>> F1=A*B;
F2=(A^2)*B;
F3=(A^3)*B;
F4=(A^4)*B;
F5=(A^5)*B;
F6=(A^6)*B;
PC=[B F1 F2 F3 F4 F5 F6];
dp=det(PC)
rp=rank(PC)
dp =
rp =
>>F1=A'*C';
F2=((A')^2)*C';
F3=((A')^3)*C';
F4=((A')^4)*C';
F5=((A')^5)*C';
F6=((A')^6)*C';
Q=[C' F1 F2 F3 F4 F5 F6];
dq=det(Q)
rq=rank(Q)
dq =
rq =
>> sys=tf([0.2081],[0.0108 1 1])
Transfer function:
0.2081
------------------
0.0108 s^2 + s + 1
>> c2d(sys,0.025,'tustin')
Transfer function:
0.001386 z^2 + 0.002772 z + 0.001386
------------------------------------
z^2 - 0.9075 z - 0.06581
Sampling time (seconds): 0.025
Введение
Моделирование [4] – это замена объекта (оригинала) и фиксация и изучение его свойств путем исследования модели.
Процесс моделирования [4] может быть разбит на следующие этапы:
1. Формулировка цели моделирования;
2. Разработка концептуальной модели;
3. Подготовка исходных данных;
4. Разработка математической модели;
5. Выбор метода моделирования;
6. Выбор средств моделирования;
7. Разработка программной модели;
8. Проверка адекватности и корректировка модели;
9. Планирование машинных экспериментов;
10. Моделирование;
11. Анализ результатов моделирования.
В ходе курсовой работы необходимо смоделировать систему управления приводом робота-манипулятора. Целью моделирования является создание эффективной, адекватной модели. При первом рассмотрении системы можно заметить следующее:
На вход системы поступает угол поворота, который, скорее всего, создается механическим усилием;
Этот сигнал с учетом ошибки преобразуется в электрическое напряжение;
Сигнал усиливается, корректируется и направляется на двигатель;
Выходной сигнал двигателя поступает на объект – робот-манипулятор.
В качестве средства моделирования будем использовать среду Matlab 6.5.0.1. Matlab обладает мощным встроенным языком и прочими средствами для создания эффективной модели системы.
Оптимизация системы
Необходимо подобрать параметры корректирующих устройств и коэффициент усиления электронного усилителя такими, чтобы выходной сигнал удовлетворял следующим показателям качества:
максимальное перерегулирование – не более 1%;
время нарастания – не более 1с;
длительность переходного процесса – не более 3с.
Модель системы, созданная при помощи Simulink, представлена на рис 1.
Рисунок 1 - Модель САУ
Для определения параметров проведём оптимизацию системы при помощи блока NCD OutPort. Начальные значения параметров придаются 1. Настройка параметров показана на рис. 2.
Рисунок 2 - Настройка параметров оптимизации
Задавать требования к переходному процессу можно непосредственно в окне блока NCD OutPort, передвигая красные линии, или ввести их значения в окне Step Response, как на рис. 3.
Рисунок 3 - Настройка характеристик переходного процесса
Приступаем к процессу оптимизации, нажав кнопку Start. Ход оптимизации показан на рис. 4, кривой зелёного цвета соответствуют оптимальные значения настраиваемых параметров.
Рисунок 4 - Процесс оптимизации системы
Полученные оптимизированные значения параметров:
Характеристики скорректированной системы
Переходная функция системы, полученная с помощью LTI Viewer, изображена на рис. 5.
Рисунок 5 - Переходная функция системы
Как следует из графика, время нарастания составляет 0.77с, длительность переходного процесса – 3с, величина перерегулирования равно 0.79%, то есть полученная система удовлетворяет предоставленным параметрам качества.
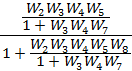
Для получения передаточной функции разомкнутой системы управления воспользуемся правилом преобразования структурных схем. Ход преобразования показан на рис. 6.
Рисунок 6 - Преобразование системы
Таким образом, полученная в результате преобразования передаточная функция имеет вид:

Для получения ПФ средствами Matlab воспользуемся функцией linmod, которая имеет следующие параметры:
‘sys’ – имя Simulink системы, из которой должна быть извлечена линейная модель;
x и u – начальный и конечный вектора соответственно. По умолчанию – 0;
Ts – постоянная времени для дискретной линеаризованной модели.
В зависимости от вида используемых параметров функция linmod может выдавать различные характеристики системы. В виде [num,den]=linmod('m2') выдает передаточную функцию системы. Полученная после некоторых математических преобразований передаточная функция:

Построим фазовые амплитудные частотные характеристики разомкнутой системы, чтобы определить её запасы устойчивости, с помощью LTI Viewer в Simulink.

Рисунок 7 - АЧХ, ФЧХ и АФХ разомкнутой системы
Как показывают графики, запас устойчивости по амплитуде составляет 20.5 дБ, запас устойчивости по фазе – 51.1о.