1.2.1 Лифты
Предназначены для перемещения грузов в вертикальном направлении по строго определенному пути. По назначению лифты делятся на:
- грузовые с проводником и без проводника,
- грузопассажирские,
- специального назначения.
- По скорости движения кабины лифты делятся на:
- тихоходные (до 0,71 м/с),
- быстроходные (от 1,0 до 1,6 м/с),
- скоростные (от 2,0 до 4,0 м/с),
- высокоскоростные (более 4,0 м/с).
С появлением высотных зданий и сооружений возникает вопрос о максимальных скоростях и высотах подъема, побочных эффектах, связанных с новшествами. Появляются высокоскоростные лифты.
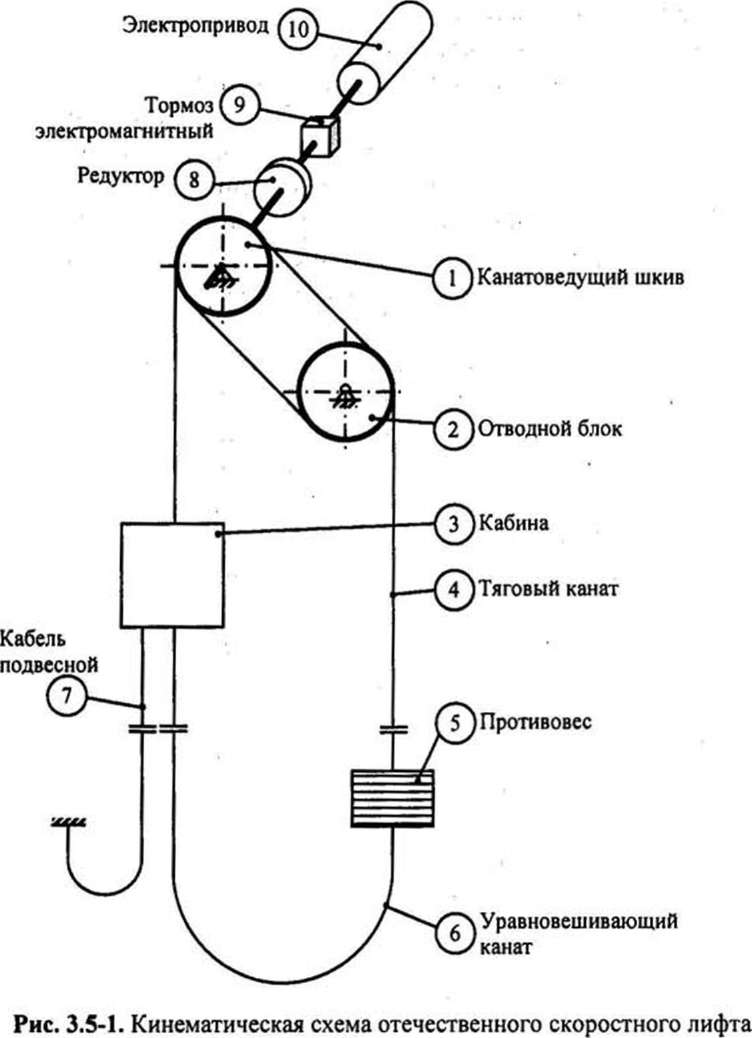
Кинематическая схема лифта (рис. 2)
Лифтовая установка состоит из трех основных частей, в которых размещено электрооборудование: машинного отделения, шахты и кабины.
Машинное отделение предназначено для размещения основного оборудования. Как правило, оно расположено вверху, что считается более экономичным, чем внизу. Однако встречаются лифты и с нижним расположением машинного отделения.
В нем установлены: приводной двигатель с электромагнитным тормазом, подъемная лебедка, редуктор, шкаф управления и органы управления при наладке. Оно имеет входную дверь и люк для погрузки оборудования.
Лебедки по конструкции могут быть редукторные и безредукторные.
Рис.2 Кинематическая схема лифта.
У редукторных лебедок канатоведущий шкив крепится к тихоходному валу редуктора. Они применяются на отечественных пассажирских лифтах со скоростью не более 1,6 м/с в сочетании с двухскоростным АД с КЗ-ротором.
Скоростные лифты имеют безредукторные лебедки в сочетании с регулируемым приводом постоянного тока независимого возбуждения. Канатоведущий трос крепится непосредственно к валу ЭД постоянного тока.
Для зданий и сооружений с большой высотой подъема безредукторные лебедки применяются в сочетании с электроприводом по схеме: реверсивный тиристорный преобразователь-двигатель.
Под машинным отделением находится блочное, в котором установлены отводные блоки и ограничитель скорости.
Шахта предназначена для размещения направляющих, по которым движутся кабина и противовес, этажной аппаратуры и аппаратуры обеспечения безопасности. С наружной стороны шахты (на этажных площадках) размещена аппаратура «вызова», шахтные двери по всей высоте.
Двери шахты открываются автоматически с помощью привода.
В нижней части шахты (в приямке) расположены гидравлические буферы кабины и противовеса и натяжные устройства уравновешивающих канатов и ограничителя скорости.
Кабина и противовес подвешены на 8 тяговых канатах.
Кабина предназначена для размещения груза, аппаратуры управления и сигнализации. Электроснабжение и связь с электрооборудованием вне кабины по гибкому подвесному кабелю. На кабине установлены: привод дверей, ловители скользящего типа, датчики замедления и точной остановки.
Аппаратура управления.
Этажные переключатели предназначены для коммутации цепей управления движением. Они регистрируют положение кабины, автоматически выбирают направление движения («верх» или «низ») и дают команду на отключение электропривода при остановке.
Конструктивно — это трехпозиционные рычажные переключатели (путевые командоаппараты) на три положения (1-0-2), имеющие подвижные (на рычаге) и неподвижные (на корпусе) контакты.
Этажные переключатели устанавливаются в стволе шахты на уровне этажа, а на кабине — фасонная отводка, которая действует на рычаг этажного переключателя.
При ходе кабины «вверх» поворотом рычага замыкается одна группа неподвижных контактов, а «вниз» — другая.
Когда кабина находится на уровне этажа, этажный переключатель — в нейтральном положении «О», а неподвижные контакты разомкнуты.
Переключатели скорости предназначены для подачи импульса на снижение скорости перед остановкой кабины. Применяются в быстроходных лифтах с электроприводом двухскоростного исполнения. Они построены по принципу действия этажных переключателей, но конструктивный вид имеют другой.
Переключатели скорости устанавливаются в стволе шахты комплектно выше и ниже этажа на расстоянии от 0,5 до 0,6 м.
Рычажные переключатели предназначены для управления грузовыми лифтами с проводником.
Конструктивно — это трехпозиционные рычажные переключатели с самовозвратом рукояти в нейтральное положение («верх»-0-«низ»), установленные в кабине.
Поворотом рукоятки выбирается направление движения, что достигается замыканием пары неподвижных контактов. При отпускании рукоятки контакты размыкаются, и двигатель останавливается (отключается).
Рычажные переключатели одновременно используется как конечный выключатель в крайних положениях кабины. Это достигается действием на ролик рычага специальных направляющих в стволе шахты.
Индуктивные датчики предназначены для применения в быстроходных лифтах в качестве этажного переключателя и переключателя скорости. Схема таких датчиков на переменном и выпрямленном токе представлена на рис.3.
В стволе шахты устанавливается П-образный шихтованный магнитопровод из стали (3), а на кабине стальная скоба (4), представляющая собой магнитный шунт. На магнитопроводе находится катушка с обмоткой (2), к которой подключается реле управления (1) непосредственно или через выпрямитель «Вп».
При уходе скобы (магнитопровод размыкается) индуктивное сопротивление (xl) катушки мало, что обеспечит срабатывание «РУ». Если стальная скоба перекрывает магнитопровод, резко возрастает индуктивное сопротивление катушки (Xl) и реле отпускает.
Надежность и четкость срабатывания «РУ» обеспечена включением емкости «С» параллельно катушке, которая выбирается из условия получения близкого к резонансу токов режима. '
Применение «Вп» для питания «РУ» повышает надежность срабатывания магнитной системы реле.
Кроме того, в путевых датчиках (ДПЭ) нашли широкое применение устройства с герметичными контактами (герконы).
Применение индуктивных датчиков устраняет такие недостатки «ЭП» и «ПС», как шумность и радиопомехи, возникающие при работе контактных устройств.
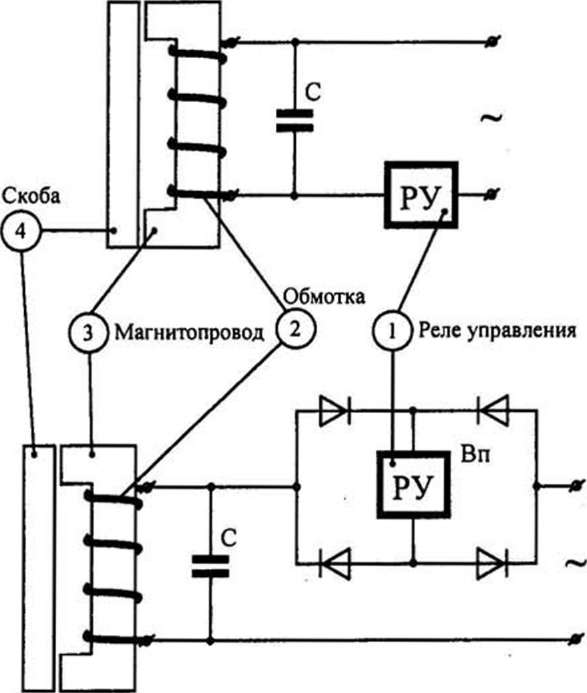
Рис. 3 Принципиальная электрическая схема ИД на переменном (а) и выпрямленном (б) токе
Магнитная отводка. Электромагнитное устройство, устанавливаемое на кабине и контролирующее работу замков дверей шахты. Упор «магнитная отводка» соединен с якорем электромагнита отводки «ЭмО». При нахождении кабины на этаже «ЭмО» обесточен, упор под действием пружины отводит защелку замка двери шахты, позволяя ее открыть.
При движении «ЭмО» под питанием — защелка введена, что запрещает открытие двери.
Такие защелки применяются в лифтах старой конструкции (или модернизированных) с ручным приводом дверей шахты.
Вентиляционные установки
Центробежные вентиляторы являются основным элементом различных вентиляционных установок.
Они обеспечивают технологический процесс производства (подача газа в рабочие объемы) и условия трудовой деятельности (кондиционеры, общецеховая система вентиляции).
Вентиляционные установки достаточно просто поддаются автоматизации по сигналам изменения режима и реагируют на них без участия обслуживающего персонала путем переключения в схемах управления.
Это позволяет задачи обслуживающего персонала свести к периодическому контролю за установками и плановой профилактике.
Основным параметром регулирования таких установок, на который надо воздействовать, является угловая скорость приводного электродвигателя.
Мостовой кран
Краны - это грузоподъемные устройства для вертикального и горизонтального перемещения грузов на небольшие расстояния. Однотипными узлами всех кранов являются:
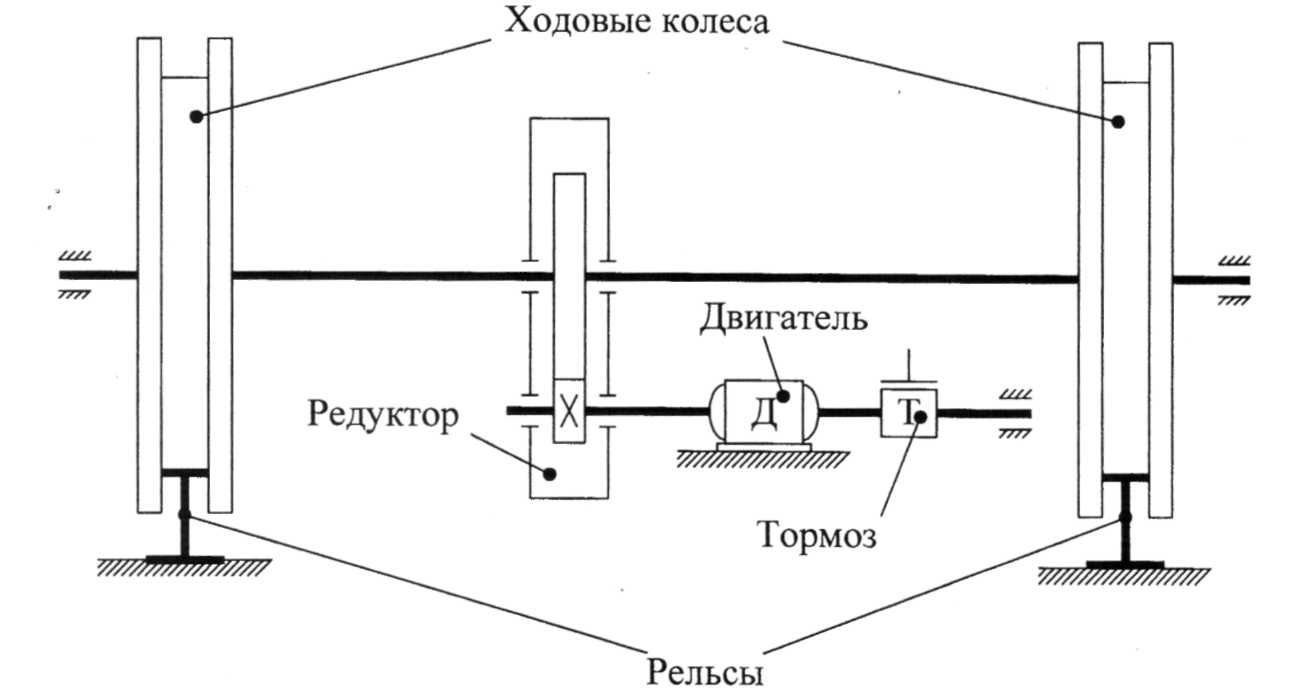
1. Механизм передвижения моста.
Передвижение моста (несущей конструкции) осуществляется по рельсам подкранового пути, вдоль пролета цеха.
Кинематическая схема механизма передвижения представлена на рис. 4.
 Главные балки коробчатого сечения или в виде решетчатых ферм расположены по ширине пролета цеха и скреплены концевыми балками.
Главные балки коробчатого сечения или в виде решетчатых ферм расположены по ширине пролета цеха и скреплены концевыми балками.
Рис.4. Кинематическая схема механизма передвижения моста с общим приводом колес.
К концевым балкам устанавливаются ходовые колеса, которые движутся по рельсам.
Привод колес от электродвигателя с тормозом через редуктор может быть раздельным или общим. Скорость передвижения моста номинальная - от 2.0 до 2.3 м/с.
2. Механизм передвижения тележки.
Передвижение тележки осуществляется вдоль моста по проложенным рельсам на 4 ходовых колесах.
Кинематическая схема механизма передвижения тележки представлена на рис.5.

Рис.5. Кинематическая схема механизма передвижения тележки
Привод колесной пары от электродвигателя с электромагнитным тормозом через редуктор. Колеса передвигаются по рельсам. На тележке установлена лебедка подъемная для груза. Скорость передвижения тележки номинальная - от 0.65 до 1.0 м/с.
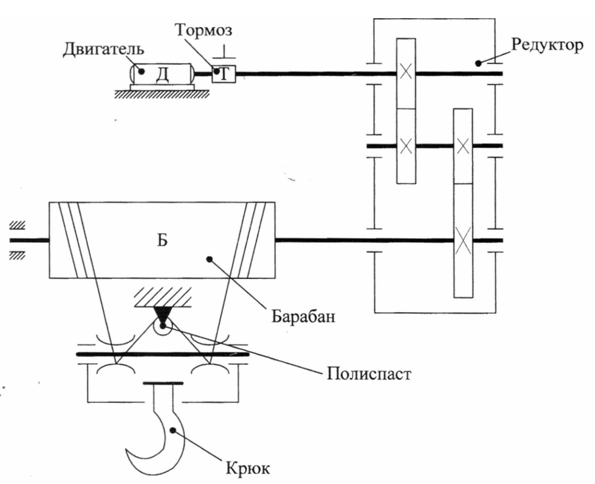
3. Механизм подъема.
Механизм подъема представляет собой подъемную лебедку барабанного типа.
Кинематическая схема механизма подъема представлена на рис.6.
Барабан лебедки с намотанным на него канатом приводится во вращение двигателем с тормозом через редуктор.
К канату крепится грузозахватывающее устройство - крюк. Для механизмов подъема наибольшее применение получили полиспасты, которые передают движение от барабана к крюку.
Среди грузозахватывающих устройств чаще всего применяются крюк или электромагнит.
По грузоподъемности мостовые краны условно делятся на малые (от 5 до Ют.), средние (от 10 до 20т.) и крупные (более 50т).
На тележках мостового крана грузоподъемностью более 15т. устанавливается 2 механизма подъема: главный и вспомогательный.
 Подвод электропитания - от главных троллеев, уложенных вдоль подкранового пути, по скользящим токосъемникам. Питание грузозахватывающего устройства осуществляется гибким кабелем.
Подвод электропитания - от главных троллеев, уложенных вдоль подкранового пути, по скользящим токосъемникам. Питание грузозахватывающего устройства осуществляется гибким кабелем.
Рис. 6. Кинематическая схема механизма подъема.
Управление механизмами крана из кабины оператора-крановщика, в которой установлены контроллеры и командокон-троллеры. Аппаратура управления и резисторы расположены на мосту.
1.3.Режимы работы и требования к приводу лифта
Электроприводом должна обеспечиваться:
- реверсивная работа,
- жесткость механической характеристики,
- плавность пуска и торможения при условии, что ускорение и замедление не превышают допустимых значений,
- минимальное время переходных процессов,
- точность остановки кабины на уровне пола этажа,
режим работы — повторно-кратковременный или длительный.
Рекомендуется устанавливать на:
• тихоходные лифты — АД с короткозамкнутым ротором или фазным ротором,
• быстроходные — АД двухскоростные, обеспечивающие понижение скорости при остановке или с фазным ротором, в случае ограниченной мощности сети,
• скоростные — систему «Г-Д» с магнитными, электромашинными или тиристорными усилителями для питания обмотки возбуждения генератора,
• высокоскоростные — систему «ТП-Д», наиболее перспективную и обеспечивающую наиболее оптимально законы управления.