

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Топ:
Выпускная квалификационная работа: Основная часть ВКР, как правило, состоит из двух-трех глав, каждая из которых, в свою очередь...
Установка замедленного коксования: Чем выше температура и ниже давление, тем место разрыва углеродной цепи всё больше смещается к её концу и значительно возрастает...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
В электрической тяге различают электромеханические характеристики – на валу двигателя и на ободе колеса. Электромеханическими характеристиками на валу электрического двигателя называются зависимости угловой скорости якоря двигателя от тока  , момента двигателя от тока М =
, момента двигателя от тока М =  , и коэффициента полезного действия от тока
, и коэффициента полезного действия от тока  , при напряжении питания, равном номинальному. Электромеханические характеристики зависят от типа двигателей, установленных на подвижном составе. В электроподвижном составе постоянного тока применяются двигатели, имеющие следующие системы возбуждения: последовательная, смешанная и независимая. Каждая система возбуждения обладает своими характерными особенностями, которые
, при напряжении питания, равном номинальному. Электромеханические характеристики зависят от типа двигателей, установленных на подвижном составе. В электроподвижном составе постоянного тока применяются двигатели, имеющие следующие системы возбуждения: последовательная, смешанная и независимая. Каждая система возбуждения обладает своими характерными особенностями, которые
и определяют степень пригодности двигателя для тяги. Для определения электромеханических характеристик на валу используют
следующие уравнения:
скорость вращения якоря, рад/с,
 ; (1)
; (1)
вращающий момент двигателя, Н·м,
 (2)
(2)
коэффициент полезного действия двигателя:
 , (3)
, (3)
где Е – ЭДС, индуктируемая в обмотке якоря; Ф – магнитный поток, В · с; с' =  конструкционная постоянная; N и
конструкционная постоянная; N и  – число проводников и число параллельных ветвей обмотки якоря;
– число проводников и число параллельных ветвей обмотки якоря;
р – число пар полюсов;  напряжение на двигателе. В; I – ток якоря двигателя, А; r – сопротивление внутренней силовой цепи двигателя, Ом;,
напряжение на двигателе. В; I – ток якоря двигателя, А; r – сопротивление внутренней силовой цепи двигателя, Ом;,  и
и  – соответственно механические и магнитные потери в двигателе, Вт;
– соответственно механические и магнитные потери в двигателе, Вт;  =
=  – электрические потери в двигателе, Вт.
– электрические потери в двигателе, Вт.
Электромеханическими характеристиками, отнесенными к ободу колеса, называются зависимости скорости движения поезда υ, силы тяги на ободе колеса Fи КПД электропривода ηв функции тока якоря I. Они могут быть получены из электромеханических характеристик на валу путем следующего пересчета:
|
|
 (4)
(4)
 (5)
(5)
 , (6)
, (6)
где  – передаточное число редуктора от вала двигателя к движущей оси;
– передаточное число редуктора от вала двигателя к движущей оси;  – диаметр движущего колеса, м;
– диаметр движущего колеса, м;  КПД зубчатой передачи;
КПД зубчатой передачи;  относительные потери мощности в зубчатой передаче, %;
относительные потери мощности в зубчатой передаче, %;  – потери мощности в зубчатой передаче, Вт.
– потери мощности в зубчатой передаче, Вт.
Электромеханические характеристики на ободе могут быть рассчитаны также с помощью следующих формул:
 , (7)
, (7)
где  машинная постоянная:
машинная постоянная:
 ; (8)
; (8)
 , (9)
, (9)
где  F – уменьшение силы тяги из-за магнитных и механических потерь,
F – уменьшение силы тяги из-за магнитных и механических потерь,
 ; (10)
; (10)
 . (11)
. (11)
Подведенное к двигателю напряжение  допустимо принимать неизменным для ПС без преобразователей, а при их наличии определять для каждого значения тока в соответствии с внешней характеристикой преобразователя. Полезная мощность Р,Вт, отнесенная к ободу колеса,
допустимо принимать неизменным для ПС без преобразователей, а при их наличии определять для каждого значения тока в соответствии с внешней характеристикой преобразователя. Полезная мощность Р,Вт, отнесенная к ободу колеса,
 . (12)
. (12)
На основании приведенных соотношений выполнено построение характеристик двигателей последовательного возбуждения (рис. 1, с), параллельного возбуждения (рис. 1, б),согласно смешанного возбуждения (рис. 1, в)и встречно-смешанного возбуждения (рис. 1, г),у которого намагничивающая сила (НС) последовательной обмотки больше НС параллельной обмотки.

Рис. 1. Электромеханические характеристики электрических двигателей последовательного (a), параллельного (б), согласно-смешанного (в) и встречно-смешанного (г) возбуждения:  электромагнитная сила тяги двигателя; F – сила тяги на ободе колеса; сФ – магнитный поток двигателя; v – скорость поезда;
электромагнитная сила тяги двигателя; F – сила тяги на ободе колеса; сФ – магнитный поток двигателя; v – скорость поезда;
η – КПД двигателя; I – ток якоря;  – ток холостого хода;
– ток холостого хода;  ток шунтовой обмотки;
ток шунтовой обмотки;  расчетный сдвиг тока для движения встречно-смешанного возбуждения;
расчетный сдвиг тока для движения встречно-смешанного возбуждения;  уменьшение силы тяги
уменьшение силы тяги
Двигатель встречно-смешанного возбуждения, у которого НС параллельной обмотки больше НС последовательной обмотки, непригоден для электрической тяги из-за его электрической и механической неустойчивости. Характеристики тяговых двигателей независимого возбуждения при отсутствии автоматического регулирования тока возбуждения аналогичны рассмотренным характеристикам двигателя параллельного возбуждения. При применении двигателей независимого возбуждения с автоматическим регулированием тока возбуждения возможно получение любых характеристик, находящихся в площади, ограниченной осями координат и предельно допустимыми значениями тока и скорости. Для питания обмотки независимого возбуждения необходима установка возбудителя.
|
|
Характеристики, у которых сила тяги резко снижается с увеличением скорости, т.е. с высоким коэффициентом жесткости (dF/dv → ∞), называются жесткими. Характеристики, у которых скорость резко изменяется с изменением силы тяги, т.е. с низким коэффициентом жесткости (dF/dv → 0), называются мягкими.
Импульсное управление (рис. 2) обеспечивает возможность регулирования в широких пределах напряжения, подводимого к тяговым двигателям. Благодаря этому отсутствует жесткая связь между напряжением на двигателе и в контактной сети. При импульсном регулировании ток поступает в цепь нагрузки отдельными чередующимися импульсами. С помощью реакторов и конденсаторов из этих чередующихся импульсов формируется непрерывный ток тяговых двигателей. Изменяя соотношение продолжительности импульса и паузы, можно изменять напряжение на двигателях, тем самым осуществляя плавный безреостатный пуски регулирование скорости подвижного состава.
Периодическое отключение и подключение цепи нагрузки к источнику питания  происходит с помощью полупроводникового ключа К. Для сглаживания пульсаций тока в двигателе последовательно с ним включен нагрузочный реактор
происходит с помощью полупроводникового ключа К. Для сглаживания пульсаций тока в двигателе последовательно с ним включен нагрузочный реактор  а параллельно цепи нагрузки – неуправляемый вентиль – обратный диод V
а параллельно цепи нагрузки – неуправляемый вентиль – обратный диод V  , через который происходит замыкание тока в нагрузке при разомкнутом ключе К. На входе преобразователя установлен
, через который происходит замыкание тока в нагрузке при разомкнутом ключе К. На входе преобразователя установлен
Г-образный фильтр, состоящий из реактора – индуктивности Lфи конденсатора Сф для сглаживания пульсаций тока в контактной сети. Обозначим через  продолжительность проводящего (включенного) состояния ключа K, а через T длительность периода работы ключа.
продолжительность проводящего (включенного) состояния ключа K, а через T длительность периода работы ключа.
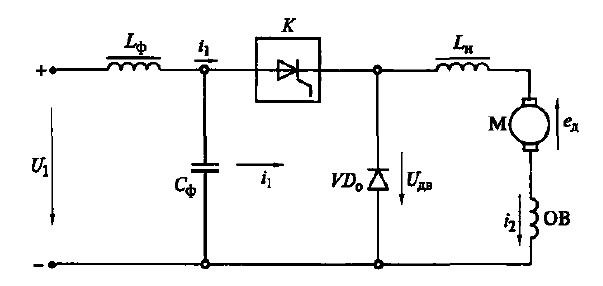
Рис. 2. Принципиальная схема импульсного управления ПС: К – полупроводниковый ключ (импульсный регулятор); М – двигатель; ОВ – обмотка возбуждения; V – обратный диод;  – нагрузочный реактор;
– нагрузочный реактор;  – индуктивность фильтра; Сф – емкость фильтра;
– индуктивность фильтра; Сф – емкость фильтра;  – противоЭДС двигателя;
– противоЭДС двигателя;  – напряжение на токоприемнике;
– напряжение на токоприемнике;  – напряжение на двигателе;
– напряжение на двигателе;  ток, потребляемый из сети;
ток, потребляемый из сети;  – ток двигателя
– ток двигателя
|
|
Можно показать, что
 . (13)
. (13)
Отношение продолжительности t1проводящего состояния ключа к длительности Т периода называют коэффициентом заполнения импульсов  .
.
Изменяя значение коэффициента  можно менять напряжение на тяговом двигателе. Для расчета тяговых характеристик с импульсными преобразователями важно знать, как меняется напряжение на выходе такого преобразователя в зависимости от тока нагрузки, т.е. его внешнюю характеристику. Последняя зависит от конкретного исполнения ключа К. Например, при тиристорном ключе К иширотной системе регулирования внешние характеристики имеют вид, показанный на рис. 3.
можно менять напряжение на тяговом двигателе. Для расчета тяговых характеристик с импульсными преобразователями важно знать, как меняется напряжение на выходе такого преобразователя в зависимости от тока нагрузки, т.е. его внешнюю характеристику. Последняя зависит от конкретного исполнения ключа К. Например, при тиристорном ключе К иширотной системе регулирования внешние характеристики имеют вид, показанный на рис. 3.
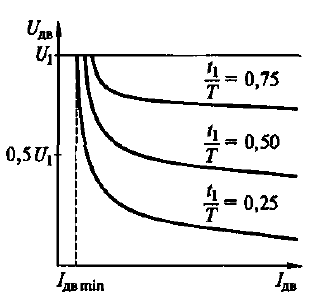
Рис. 3. Внешняя характеристика тиристорно-импульсиого преобразователя: – напряжение на двигателе; – напряжение на токоприемнике;  – ток двигателя;
– ток двигателя;  минимальный ток;
минимальный ток;  /T – коэффициент заполнения импульсов
/T – коэффициент заполнения импульсов
Для расчета тяговых характеристик с импульсными преобразователями важно знать, как меняется напряжение на выходе такого преобразователя в зависимости от тока нагрузки, т.е. его внешнюю характеристику. Последняя зависит от конкретного исполнения ключа К. Например, при тиристорном ключе К иширотной системе регулирования внешние характеристики имеют вид, показанный на рис. 3.
Определив по графикам напряжение на двигателе в зависимости от тока, рассчитывают скоростную характеристику по выражению (7). Силу тяги определяют так же, как и при контакторно-реостатном управлении. Импульсный преобразователь имеет практически бесконечно большое число внешних характеристик в режиме тяги. Следовательно, подвижной состав может иметь такое же число тяговых характеристик.
Реально их число будет определяться системой управления ПС. В общем случае на эти характеристики наложены ограничения:
– по силе сцепления  максимальной мощности преобразователя;
максимальной мощности преобразователя;
–  степени допустимого ослабления;
степени допустимого ослабления;
– βmin поля тягового двигателя при номинальном напряжении на его зажимах и конструкционной скорости  .
.
На рис. 4 приведен пример тяговых характеристик ПС при
U = const.
|
|

Рис. 4. Тяговые характеристики при импульсном преобразователе;  сила тяги ПС; v – скорость ПС;
сила тяги ПС; v – скорость ПС;  – ограничение по силе сцепления;
– ограничение по силе сцепления;  – ограничение по конструкционной скорости;
– ограничение по конструкционной скорости;  максимальная мощность преобразователя; β
максимальная мощность преобразователя; β  – степень допустимого ослабления поля
– степень допустимого ослабления поля
Тормозные характеристики ПС
Торможение применяется для остановки поезда и ограничения его скорости на спусках, перед кривыми участками и соответствующими путевыми знаками. По характеру использования тормозной силы различают служебное торможение и экстренное. Служебное торможение применяется в нормальных условиях работы, экстренное – для предупреждения несчастных случаев и аварий. Экстренное торможение обеспечивает максимальное замедление и минимальный тормозной путь, поэтому машинист должен использовать максимальную тормозную силу.
Процесс торможения определяется тормозными характеристиками, т.е. зависимостями тормозной силы поезда от его скорости В = f(v) или b(v).По способу создания тормозной силы различают системы механического и электрического торможения. При механическом торможении,тормозная сила создается в результате сил трения между соприкасающимися, взаимно скользящими поверхностями. Наиболее распространен колесно-колодочный тормоз. В этом тормозе тормозная сила создается за счет трения, возникающего при нажатии тормозной колодки на бандаж вращающегося колеса. Обозначим силу нажатия тормозной колодки через К, кН, а коэффициент трения между колесом и колодкой –  Тогда тормозная сила поезда В,Н, в целом равна суммарному нажатию
Тогда тормозная сила поезда В,Н, в целом равна суммарному нажатию  , кН, всех тормозных колодок с учетом коэффициента трения
, кН, всех тормозных колодок с учетом коэффициента трения  , последних:
, последних:
 (14)
(14)
Коэффициент трения , зависящий от материала трущихся поверхностей, в общем случае уменьшается с увеличением скорости υдвижения. Поэтому при постоянном нажатии тормозных колодок тормозная характеристика В(υ) механического тормоза имеет вид падающей кривой (рис. 5). Такой режим благоприятен для остановочного торможения.

Рис. 5. Тормозная характеристика при механическом
торможении: В– тормозная сила; v– скорость поезда
При электрическом торможении тяговые двигатели переводятся в генераторный режим. Момент, который требуется для вращения генератора, реализуется на ободе движущего колеса в виде тормозной силы. Различают электрическое рекуперативное и реостатное торможение. При рекуперативном торможении тяговые двигатели обращаются в генераторы, при этом вырабатываемая ими энергия возвращается в тяговую сеть. Эта энергия может быть использована подвижным составом, находящимся на линии, или возвращена в первичную сеть. При установке накопителя эта энергия рекуперации может быть передана накопителю и в дальнейшем использована для тяги. Рекуперативное торможение применяется как для торможения на спусках, так и для остановки подвижного состава. Для осуществления рекуперативного торможения при контакторно-реостатном управлении двигателями необходимо, чтобы сумма ЭДС тяговых двигателей в генераторном режиме при последовательном их соединении была выше напряжения  контактной сети, т.е.
контактной сети, т.е.
|
|
 =
=  r. (15)
r. (15)
Ток и скорость поезда при рекуперации соответственно равны
 =
=  . (16)
. (16)
Тормозная сила равна
 (17)
(17)
где  составляющая тормозной силы, зависящая от механических и магнитных потерь в двигателе и передаче:
составляющая тормозной силы, зависящая от механических и магнитных потерь в двигателе и передаче:
 . (18)
. (18)
Тормозная сила В с увеличением тока рекуперации сначала возрастает до некоторого максимума  , а затем вследствие резкого снижения магнитного потока начинает уменьшаться и в точке аB = 0. Следовательно, при скоростях, больших критической скорости рекуперации (точка b),соответствующей
, а затем вследствие резкого снижения магнитного потока начинает уменьшаться и в точке аB = 0. Следовательно, при скоростях, больших критической скорости рекуперации (точка b),соответствующей  (точка с), рекуперативное торможение становится механически неустойчивым (рис. 6).
(точка с), рекуперативное торможение становится механически неустойчивым (рис. 6).

Рис. 6. Электромеханические характеристики при рекуперативном торможении:  ЭДС двигателя при рекуперации; В – тормозная сила;
ЭДС двигателя при рекуперации; В – тормозная сила;  – ток рекуперации;
– ток рекуперации;  максимальная тормозная сила;
максимальная тормозная сила;  – критическая скорость рекуперации; а – точка, соответствующая минимальному магнитному потоку; b – точка критической скорости рекуперации; с – точка, соответствующая
– критическая скорость рекуперации; а – точка, соответствующая минимальному магнитному потоку; b – точка критической скорости рекуперации; с – точка, соответствующая
На рис. 7 приведены тормозные характеристики B = f(v)при разных ступенях возбуждения возбудителя. Характеристики будут иметь ограничения по максимальной скорости максимальной ; тормозной силе  ; и коммутации – минимальной степени ослабления (
; и коммутации – минимальной степени ослабления ( )min. Процесс рекуперативного торможения при контакторно-реостатном и импульсном управлении существенно различается. В случае контакторно-реостатного управления рекуперация возможна при независимом и встречно-смешанном возбуждении тяговой машины. К тому же ЭДС тяговой машины должна быть выше напряжения контактной сети. При импульсном регулировании рекуперация возможна, если ЭДС меньше напряжения сети.
)min. Процесс рекуперативного торможения при контакторно-реостатном и импульсном управлении существенно различается. В случае контакторно-реостатного управления рекуперация возможна при независимом и встречно-смешанном возбуждении тяговой машины. К тому же ЭДС тяговой машины должна быть выше напряжения контактной сети. При импульсном регулировании рекуперация возможна, если ЭДС меньше напряжения сети.

Рис. 7. Характеристики рекуперативного торможения при разных ступенях возбуждения возбудителя: В – тормозная сила;  минимальная скорость; – конструкционная скорость; (
минимальная скорость; – конструкционная скорость; ( ) min – минимальная степень ослабления поля;
) min – минимальная степень ослабления поля;  – ток
– ток
возбуждения возбудителя
Рассмотрим принцип работы импульсного преобразователя в процессе рекуперативного торможения. Нагрузочный реактор  обеспечивает сглаживание в цепи тяговых машин, а обратный диод V препятствует протеканию тока из контактной сети в цепь нагрузки в промежутках времени, напряжение на двигателях ниже напряжения сети. Среднее напряжение
обеспечивает сглаживание в цепи тяговых машин, а обратный диод V препятствует протеканию тока из контактной сети в цепь нагрузки в промежутках времени, напряжение на двигателях ниже напряжения сети. Среднее напряжение  , В, нагрузки тягового двигателя, работающего в генераторном режиме, определяется из следующего соотношения:
, В, нагрузки тягового двигателя, работающего в генераторном режиме, определяется из следующего соотношения:
 (1-
(1-  , (19)
, (19)
где T – период работы регулятора; u – мгновенное значение напряжения;  время включения.
время включения.
По схеме на рис. 8 рекуперативного торможения ЭДС тяговой машины должна быть меньше напряжения контактной сети. Только при этом условии возможны периодическое накопление энергии в индуктивностях и последующая отдача ее.

Рис. 8. Схема включения импульсного регулятора при рекуперации: М – двигатель; ОВ – обмотка возбуждения; К – регулятор; VDo – обратный диод;  – сглаживающий нагрузочный реактор; Lф– индуктивность фильтра; – напряжение на токоприемнике;
– сглаживающий нагрузочный реактор; Lф– индуктивность фильтра; – напряжение на токоприемнике;  – напряжение нагрузки на регуляторе;
– напряжение нагрузки на регуляторе;  – ток двигателя при рекуперации;
– ток двигателя при рекуперации;  – ток, отдаваемый в сеть; Сф – емкость фильтра
– ток, отдаваемый в сеть; Сф – емкость фильтра
|
|
|

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!