

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Топ:
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному...
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Интересное:
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Рисунок 12
Алгоритм используется при построении ПИД-регулятора, работающего в комплекте с исполнительным механизмом постоянной скорости. Алгоритм, как правило, применяется в сочетании с алгоритмом импульсного вывода ИВА (ИВБ), который преобразует выходной аналоговый сигнал алгоритма РИМ в последовательность импульсов, управляющих исполнительным механизмом. Помимо формирования закона регулирования в алгоритме вычисляется сигнал рассогласования, этот сигнал фильтруется, вводится зона нечувствительности. Алгоритм содержит узел настройки, позволяющий автоматизировать процесс настройки регулятора.
ЗДН (24) – Задание
Алгоритм применяется для формирования сигнала ручного задания в контуре регулирования. Через этот алгоритм к регулятору подключается также программные задатчики и сигнал внешнего задания.
Если Ссб=1, то статическая балансировка включена. В этом случае, если регулятор находится в ручном режиме, то Хздн=Хi. То есть сигнал задания отслеживает значение регулируемой переменной, и в момент переключения в автоматический режим величина рассогласования равна нулю (e = Хздн-Хi). На выходе регулятора в этот момент не изменяется сигнал регулирования. Поэтому положение исполнительного механизма (ИМ) остаётся неизменным, т.е. переключение с ручного режима на автоматический происходит безударно. В автоматическом режиме задание регулятору можно изменять или с ЛП, или с ПЭВМ, если настроен пакет верхнего уровня (SCSDA-система).
С помощью переключателя вида задания выбирается один из трех видов задания: ручное задание РЗ, программное задание ПЗ или внешнее задание ВЗ.

Рисунок 13
ЗДЛ (25) ‑ Задание локальное
|
|

Рисунок 14
Алгоритм используется в составе каскадного регулятора. Он необходим, если должно предусматриваться переключение каскадного регулятора в локальный режим и ручное изменение задания ведомого регулятора в этом режиме. Алгоритм ЗДЛ используется в сочетании с алгоритмом ОКО.
Алгоритм ЗДЛ включается между ведомым и ведущим регулятором в каскадной схеме. Алгоритм содержит узел ручного задания и переключатель режимов. В положении КУ (каскадное управление) сигнал на входе Х алгоритма передается на его выход. Обычно вход Х подключается к выходу ведущего регулятора, а к выходу Y подключается вход ведомого регулятора. В этом случае в каскадном режиме алгоритм ЗДЛ связывает между собой ведущий и ведомый регулятор.
При переходе в локальный режим связь между ведущим и ведомым регуляторами разрывается и к выходу алгоритма ЗДЛ подключается узел
ручного задания. Это задание может изменяться вручную с помощью клавиш лицевой панели (см. также описание алгоритма ОКО).
На дискретном выходе Dлок устанавливается значение Dлок = 0, если режим каскадный, и Dлок = 1, если режим локальный.
Алгоритм ЗДЛ является инициатором команды отключения. Эта команда формируется на каскадном входе Х в том случае, когда установлен локальный режим управления. Эта команда вместе с значением начальных условий Х0 = Y передается предвключенному алгоритму.
При каскадном режиме ручной задатчик отслеживает текущее значение выходного сигнала алгоритма, так что переключение в локальный режим происходит безударно.
На каскадный выход Y может поступить внешняя команда отключения или запрета. Если алгоритм работает в режиме ЛУ, эти команды алгоритмом не воспринимаются. При работе в режиме КУ эти команды вместе с значением начальных условий Y через вход Х транслируются предвключенному алгоритму.
РУЧ (26) ‑ Ручное управление
При нажатии клавиши  (ручной режим) на ЛП Р-130 на 2-м выходе алгоритма устанавливается «1», т.е. Dруч = 1. Сигнал Dруч = 1 снимается нажатием клавиши
(ручной режим) на ЛП Р-130 на 2-м выходе алгоритма устанавливается «1», т.е. Dруч = 1. Сигнал Dруч = 1 снимается нажатием клавиши  . Комбинация клавиш +D формирует на 3-м выходе алгоритма РУЧ единичный сигнал: Dдист=1. Нажатие клавиш +Ñ отменяет дистанционный режим, т.е. Dдист=0. Все эти операции возможны, если вход 6 алгоритма ОКО соединён с первым выходом алгоритма РУЧ.
. Комбинация клавиш +D формирует на 3-м выходе алгоритма РУЧ единичный сигнал: Dдист=1. Нажатие клавиш +Ñ отменяет дистанционный режим, т.е. Dдист=0. Все эти операции возможны, если вход 6 алгоритма ОКО соединён с первым выходом алгоритма РУЧ.
|
|
Рисунок 15
Сруч – команда переключения на ручной режим. Хк - входной сигнал с регулятора РАН. Хдст-сигнал дистанционный. У-основной выход. Dруч- признак ручного режима. Dдист – признак дистанционного режима. П1, П2 – переключатели. РУ-ручное управление. ДУ-дистанционное управление. ЛУ-локальное управление или автоматическое управление. КУ-каскадное управление.
При переходе из режима автоматического регулирования на ручное сигнал регулирования на выходе алгоритма РУЧ сохраняется неизменным, следовательно, и положение ИМ сохраняется неизменным, т.е. переключение осуществляется безударно.
Алгоритм РУЧ может использоваться и без регулятора. В частности, с его помощью можно с лицевой панели вводить дискретные (Dруч D дист) сигналы или аналоговый сигнал. Например, алгоритм РУЧ используется в блоке циклической индикации, именно, с целью формирования с лицевой панели регулирующей модели дискретного сигнала останова циклической индикации.
ПРЗ (27) ‑ Программный задатчик
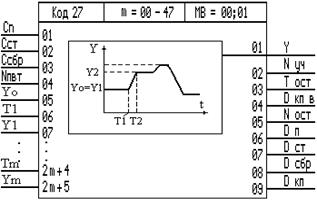
Рисунок 16
 Рисунок 17
Рисунок 17
Рис. 17. Сигнал, формируемый программным задатчиком. Данный алгоритм используется в программном регуляторе.
ИНЗ (28) ‑ Интегрирующий задатчик
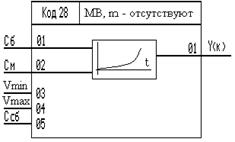
Рисунок 18
ПОК (29) ‑ Пороговый контроль
В каждом канале входной сигнал Хi сравнивается с двумя уставками: верхней Хв,i и нижней Хн,i. Если Хн,i < Хi < Хв,i, то дискретный сигнал на выходе канала равен логическому 0. В противном случае этот сигнал равен логической 1.
Если хотя бы один из контролируемых сигналов достигнет заданной для него уставки (порога), выходной сигнал D=1, иначе D=0. На выходе N формируется номер входного сигнала i, в котором сигнал Хi <= Хн,i или Хi >= Хв,i.
В каждом канале предусмотрен фиксированный гистерезис, равный 0,2%.
Если одновременно несколько сигналов достигли уставки, N равно младшему номеру из этих сигналов.
Рисунок 19
|
|
|

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!