

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
Топ:
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Дисциплины:
|
из
5.00
|
Заказать работу |
Моделирование замкнутой системы регулирования и подбор настроек ПИ-регулятора
Цель работы: Целью работы является моделирование на ПЭВМ с помощью инструментария Simulink замкнутой системы автоматического регулирования (САР) по заданному математическому описанию и подбор настроек ПИ -регулятора.
Краткие теоретические сведения
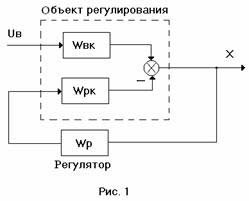
Замкнутая CAP состоит из объекта регулирования и регулятора.
Объект может иметь различные передаточные функции по возмущающему каналу и по регулирующему каналу Wвк  Wрк. В этом случае, рис. 1, для моделирования объекта необходимо реализовать сумму двух передаточных функций.
Wрк. В этом случае, рис. 1, для моделирования объекта необходимо реализовать сумму двух передаточных функций.
Если возмущающий и регулирующий каналы совпадают Wвк = Wрк = Wо, тосхема CAP упрощается, рис. 2.
Такая схема называется схемой стабилизирующего регулирования. Во многих случаях объект имеет транспортное запаздывание  по каналу регулирования. В этом случае для моделирования объекта необходимо дополнительно использовать блок постоянного запаздывания (БПЗ), рис. З.
по каналу регулирования. В этом случае для моделирования объекта необходимо дополнительно использовать блок постоянного запаздывания (БПЗ), рис. З.
При определении настроек регулятора постоянное запаздывание по возмущающему каналу не имеет значения и его можно принять равным нулю.
Примечание: Если транспортное запаздывание по регулирующему каналу  больше чем время переходного процесса по этому же каналу, то можно сразу прекратить работу, так как никакие значения настроек ПИ -регулятора не дадут требуемого качества переходного процесса, хотя, в принципе, существуют структурные методы, решающие эту проблему.
больше чем время переходного процесса по этому же каналу, то можно сразу прекратить работу, так как никакие значения настроек ПИ -регулятора не дадут требуемого качества переходного процесса, хотя, в принципе, существуют структурные методы, решающие эту проблему.
Рассмотрим реализацию с помощью Simulink' a объектов, описываемых линейными дифференциальными уравнениями (ЛДУ) с постоянными коэффициентами вида:

| (1) |
где 
- возмущающая функция, состоящая из линейной комбинации независимой переменной u(t) и ее производных, причем n  m.
m.
Начальные условия для x и ее производных примем для простоты равными нулю, поскольку они никак не влияют на значения искомых настроек ПИ - регулятора.
Дифференциальному уравнению соответствует дробно-рациональная передаточная функция:

| (2) |
Так что любую дробно-рациональную передаточную функцию типа (2) можно переписать в виде (1). Для реализации такого рода дифференциальных соотношений между x и u известны несколько способов.
Рассмотрим один из них, - метод "вспомогательной переменной", - на примере уравнения второго порядка.
Пример 1.
| (3) |
Решим в среде Simulink сначала уравнение следующего вида:
| (4) |
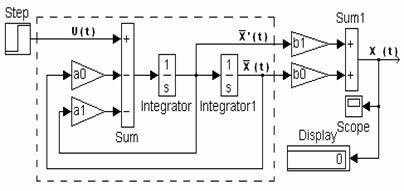
Рис. 4
Составим структурную схему решения вспомогательного уравнения (4) в среде Simulink методом понижения порядка производной, рис 4, - обведено пунктиром.
Теперь применим к левой и правой частям уравнения (4) дифференциальный оператор
| (4.1) |
и, поменяв порядок дифференцирования, окончательно получим

| (5) |
Сравнивая уравнения (3) и (5), находим, что искомая переменная x связана со вспомогательной  соотношением
соотношением

| (6) |
которое легко осуществить, рис. 4.
Задание не нулевых начальных условий не имеет значения для моделирования САР с целью получения настроек регулятора.
Пример 2.
Составить структурную схему моделирования в среде Simulink передаточной функции реального дифференцирующего звена
Начальные условия нулевые. Запишем передаточную функцию в виде дифференциального уравнения
Запишем затем вспомогательное дифференциальное уравнение

и составим для него структурную схему, рис. 5. Искомая переменная x связана со вспомогательной соотношением:

Реализуя это соотношение с помощью блока коэффициента Gain 3, получаем окончательную схему, рис. 5.
Рис. 5
Рекомендации по подбору настроек ПИ-регулятора
Пример 3.
Пусть регулятору следует поддерживать величину + 76.4 оС. В этом случае величина задания будет х3 = 76.4, поданное на вход сумматора со знаком " - ". На рис. 10 величина задания, реализованная на элементе Константа (Constant), x3 = 100, поэтому следует изменить ее на величину x3 = 76.4. Тогда действительно, если текущая величина x (t) = 76.4, т. е. равна величине задания, то на выходе сумматора Sum1 рассогласование  x = 0. Если x(t) > 76.4, то x(t) > 0, если x(t) < 76.4, то x(t) < 0.
x = 0. Если x(t) > 76.4, то x(t) > 0, если x(t) < 76.4, то x(t) < 0.
Пропорциональное и интегральное воздействия регулятора складываются на Cумматоре2 (Sum2), на выходе которого получается выходная величина регулятора y рег.
Все коэффициенты в схеме на рис. 10, кроме S1 и S0, постоянные и равны 1. Если S1 = 0, то получается И -регулятор, если, наоборот, S0 = 0, - П -регулятор.
Задание. Установить (через рабочую область MatLab) S1 = 1 и S0 = 0.1. параметры скачка элемента Step установить следующие: время скачка - 3 с, начальное значение 76.4, конечное значение 60.0.
Запустить модель и наблюдать на осциллографе переменную yрег(t). После окончания моделирования, поменять произвольным образом величины настроек
S1 и S0, снова запустить модель и наблюдать y рег(t).
Задание
В качестве объекта регулирования взять объект, математическое описание которого дано в задании к лабораторной работе 1 (дифференциальное уравнение при нулевых начальных условиях).
Время запаздывания взять из табл. 1.
Таблица 1
| № вар. | ||||||||||||
| τр | 0.4 мин | мин | 0.16 с | 11.8 с | 2.6 с | 1.,2 мин | мин | 3.1 мин | 4.2 мин | 1.0 мин | 0.003 с | 0.65 с |
Моделирование замкнутой системы регулирования и подбор настроек ПИ-регулятора
Цель работы: Целью работы является моделирование на ПЭВМ с помощью инструментария Simulink замкнутой системы автоматического регулирования (САР) по заданному математическому описанию и подбор настроек ПИ -регулятора.

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!