Исследуется вариант САУ структурная схема которой приведена на. рис. 5. Здесь звено с передаточной функцией Wk(p), установленное между звеньями с передаточными функциями W1(p) = K1/(T1*p +1) и W2(p) = K2/(T2*p + 1) представляет собой последовательное корректирующее устройство. Третье звено также инерционное с передаточной функцией W3(p) = K3/(T3*p + 1). Система замкнута единичной обратной связью.
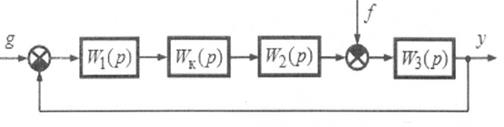
Рис. 5
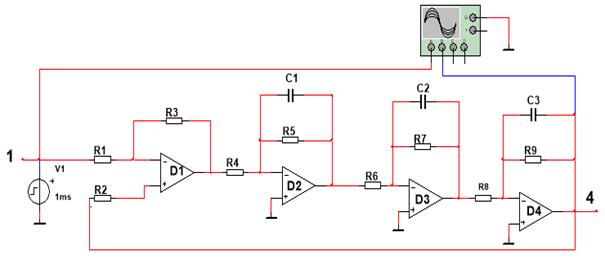
На рис. 5 приведена схема электронной модели исследуемой САУ. Звенья нескорректированной (исходной) САУ с передаточными функциями W1(p) – W3(p) и Wос(р) выполнены на усилителях DA2— - DA5. Усилитель DA1выполняет роль сумматора задающего напряжения и сигнала обратной связи. Входное (задающее) напряжение подводится к точке 1, а точка 4 представляет собой выход модели системы. Между точками 2 и 3 включается последовательное корректирующее устройство. К точке 4 подключаются осциллограф и плоттер Боде. При исследовании нескорректированной САУ точки 2 и 3 соединяются между собой. При снятии частотных, характеристик цепь обратной. связи размыкается ключом S1.
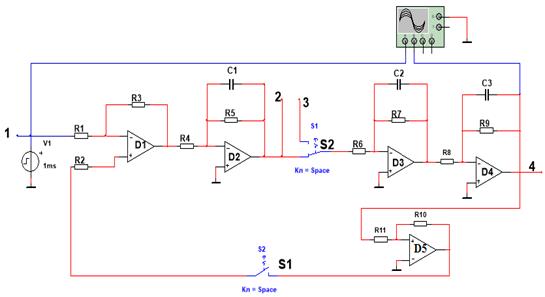
Рис. 6
Постоянные времени и коэффициенты передачи всех звеньев нескорректированной системы заданы в табл. 1. При выполнении данной работы используются полученные ранее навыки электронного моделирования и исследования систем в среде Multisim. При этом R1 = R2 = R3 = R4 = R6 = R8 = R10 = R11 = 100 кОм. Граничный коэффициент передачи нескорректированной САУ рассчитывается. по формуле
Исходя из полученного значения Кгр рассчитывается значение коэффициента передачи К2, определяются, номиналы остальных сопротивлений: резисторов, и ёмкостей конденсаторов электронной модели нескорректированной САУ и наблюдается ее переходная характеристика. При правильном расчете всех параметров она имеет вид незатухающих колебаний. Затем коэффициент передачи разомкнутой цепи САУ Кр принимается равным Кр = 0.5*Кгр (для этого величина резистора R3 уменьшается в два раза) и снимаются временные и частотные характеристики нескорректированной САУ.
В качестве последовательных корректирующих устройств в данной работе предлагается использовать однозвенный фильтр, а также пропорционально-интегральный (ПИ) и пропорционально-интегрально-дифференциальный (ПИД) регуляторы.
Однозвенный фильтр представляет собой инерционное форсирующее звено с передаточной функцией Wф(p) = (τф * p + 1) / (Tф*p + 1).Схема его электронной модели приведена на рис. 3. Для удобства работы форсирующее звено реализовано на усилителе DA1, причем постоянная времени τф = R1ф*C1ф, а коэффициент передачи Кф1 = - R2ф / R1ф. Инерционное звено реализовано на усилителе DA2, при этом постоянная: времени Тф = R4ф * С2ф и коэффициент передачи Кф2 = - R4ф / R3ф. Так как коэффициент передачи фильтра Кф = Кф1 * Кф2 = 1,необходимо принять R1ф = R2ф = R3ф = R4ф = 100 кОм.Во всех вариантах задания значение постоянной времени принимается равным Тф =0.1 мс, следовательно, С2ф = Тф / R4ф = 0.0005 / (100*103) = 1 нф. Постоянная времени τф поочередно принимает значения, равные одной из постоянных времени нескорректированной САУ, и, в соответствии с ее значением, рассчитывается величина С1ф = τф / R1ф.
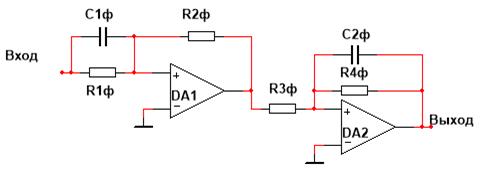
Рис. 7
ПИ - регулятор представляет собой изодромное звено с передаточной функцией Wпи(p) = Kпи * (τпи * p + 1) / p. Схема его электронной модели показана на рис. 4 причем постоянная времени τпи = R2пи * Спи и коэффициент передачи Кпи = R4пи / (R1пи * R3пи * Спи).
В лабораторной работе Кпи = 1 с-1. Следует принять R1пи = R3пи =100 кОм, R2пи =1 кО м. Значения R4пи и Спи рассчитываются в соответствии с заданным значением τпи
Спи = τпи / R2пи ; R4пи = (R1пи* R3пи * τпи) / R2пи = 107 * τпи
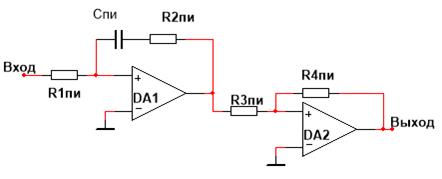
Рис. 8
ПИД - регулятор — это звено с передаточной функцией
Wпид (p) = Кпид * ((τ1пид * p + 1)*(τ2пид *p + 1)) / p
Схема электронной модели этого регулятора показана на рис. 9, причем постоянные времени τ1пид = R1пид * С1пид, τ2пид = R2пид * С2пид
и коэффициент передачи Кпид = R4пид / (R1пид * R3пид * С2пид)
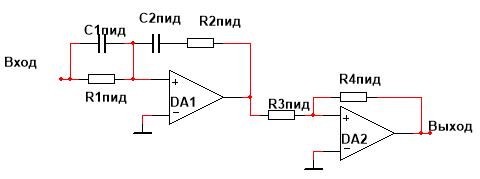
Рис. 9
В лабораторной работе постоянные времени τ1пид и τ2пид принимаются равными наибольшей и средней постоянным времени нескорректированной САУ, а значение Кпид задается из таблицы. Сопротивления R1пид = R2пид = R3пид =100 кОм, а номиналы остальных, элементов рассчитываются в соответствии с заданными значениями τ1пид, τ2пид и Кпид:
С1пид = τ1пид / R1пид = 10-5 τ1пид, С2пид = τ2пид / R2пид = 10-5 τ2пид
R4пид = Кпид R1пид R3пид С2пид = 1010 Кпид С2пид
Нескорректированная САУ