

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Интересное:
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Второй закон Ньютона. В рассматриваемых ниже математических моделях физических процессов фундаментальную роль играет второй закон Ньютона. Он гласит, что ускорение, с которым движется тело, прямо пропорционально действующей на него силе (если их несколько — то равнодействующей этих сил) и обратно пропорционально его массе:
 (1)
(1)
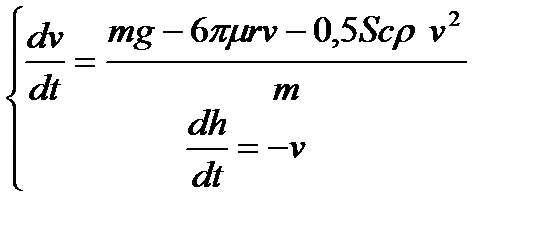
Свободное падение тела. Математическая модель свободного падения тела — уравнение второго закона Ньютона с учетом двух сил, действующих на тело — силы тяжести и силы сопротивления среды. Движение является одномерным; проецируя силу тяжести  , силу сопротивления
, силу сопротивления  , скорость
, скорость  и перемещение
и перемещение  на ось, направленную вертикально вниз, получаем :
на ось, направленную вертикально вниз, получаем :
 (2)
(2)
Сила сопротивления имеет две составляющие:  .
.
Коэффициенты  и
и  определяется свойствами среды и формой тела. Например, для шара
определяется свойствами среды и формой тела. Например, для шара  — так называемая формула Стокса, где
— так называемая формула Стокса, где  — динамическая вязкость среды,
— динамическая вязкость среды,  — радиус шара. Обычно принимают
— радиус шара. Обычно принимают  , где S - площадь сечения тела, поперечного по отношению к потоку,
, где S - площадь сечения тела, поперечного по отношению к потоку,  - плотность среды, c — безразмерный коэффициент лобового сопротивления (см. рис. 1). В конкретных задачах можно одной из составляющих силы сопротивления пренебречь (если она значительно меньше другой).
- плотность среды, c — безразмерный коэффициент лобового сопротивления (см. рис. 1). В конкретных задачах можно одной из составляющих силы сопротивления пренебречь (если она значительно меньше другой).
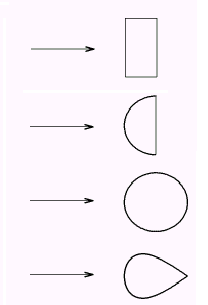
| Диск Полусфера Шар «Каплевидное» тело | c=1,11 c=0,55 c=0,4 c=0,045 |
Рис. 1. Значения коэффициента лобового сопротивления для некоторых тел, поперечное сечение которых имеет указанную на рисунке форму
Взлет ракеты. Исследуем ситуацию, когда масса тела не является величиной постоянной. Запишем второй закон Ньютона в более общей математической форме.
|
|
Построим простейшую модель вертикального взлета ракеты, приняв следующие гипотезы:
1) масса ракеты уменьшается во время взлета по линейному закону:
 , (3)
, (3)
где m0 ¾ начальная масса ракеты, заправленной топливом; mкон ¾ остаточная масса после полного выгорания топлива;a ¾ расход топлива;
2) Сила тяги двигателя постоянна на всем участке взлета.
3) плотность воздуха r, входящая в коэффициент k2, убывает по мере подъема ракеты по закону r = r0 . 10-bh, где h ¾ высота, b » 5,6 . 10-5 м-1 .
Таким образом, модель будет описываться системой двух дифференциальных уравнений для функций v(t) и h(t):
 (4)
(4)
Движение тела, брошенного под углом к горизонту. Дифференциальные уравнения модели получаются из второго закона Ньютона проецированием скорости и перемещения на горизонтальную и вертикальную оси координат:
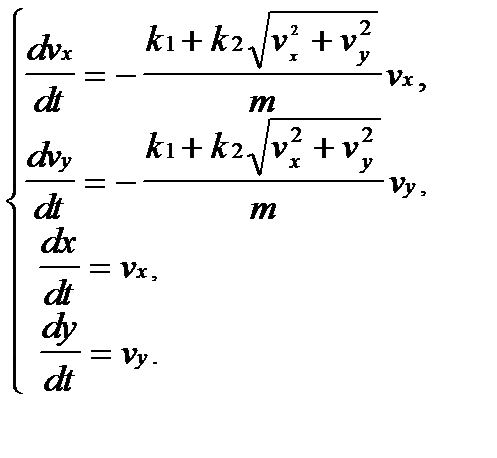
 (5)
(5)
Здесь m ¾ масса тела; v x = vcos a , vy = vsin a - величины проекций начальной скорости v на горизонтальную и вертикальную оси; a ¾ угол начального наклона вектора скорости к горизонту; k 1 и k 2 – коэффициенты, входящие в в формулу силы сопротивления.
Движение небесных тел. Рассмотрим модель движения космического тела (планеты, кометы, спутника) под действием силы всемирного тяготения в гравитационном поле, создаваемом телом с многократно большей массой.
Примем следующие предположения: «большое» тело находится в начале системы координат, другие тела на движение «малого» тела влияния не оказывают. Дифференциальные уравнения модели имеют вид
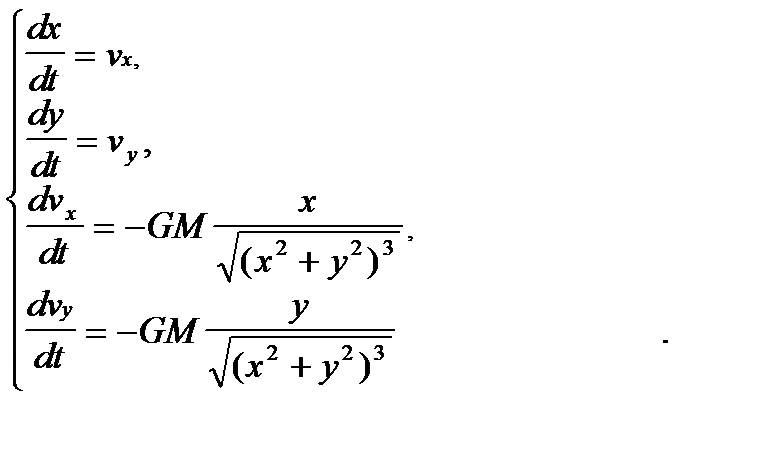 , (6)
, (6)
где M- масса «большого» тела; x, y - координаты «малого» тела, движение которого изучается; vx, vy – величины проекций скорости «малого» тела на горизонтальную и вертикальную оси, G = 6,67. 10-11 м3/кг с2 ¾ гравитационная постоянная .
Обезразмеривание. В задаче о движении небесных тел особенно неудобно работать с размерными величинами, измеряемыми миллиардами километров, секунд и т.д. В качестве величин для обезразмеривания удобно принять характерное расстояние от Земли до Солнца ρ = 1,496∙1011 м, (так называемая астрономическая единица), период круговой орбиты  , соответствующий этому расстоянию, скорость движения по ней
, соответствующий этому расстоянию, скорость движения по ней  , т.е. принять
, т.е. принять
|
|

После обезразмеривания получаем
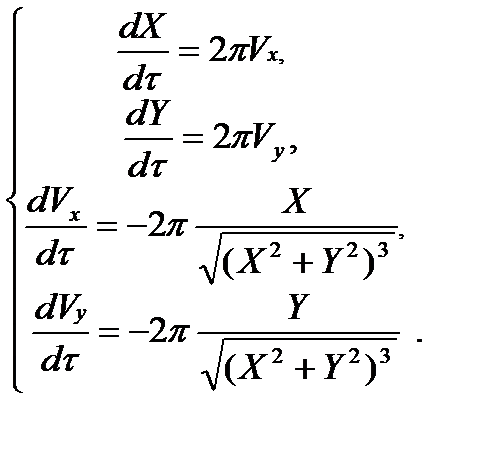 (7)
(7)
В безразмерных переменных уравнения вообще не содержат параметров. Единственное, что отличает разные режимы движения друг от друга – это начальные условия.
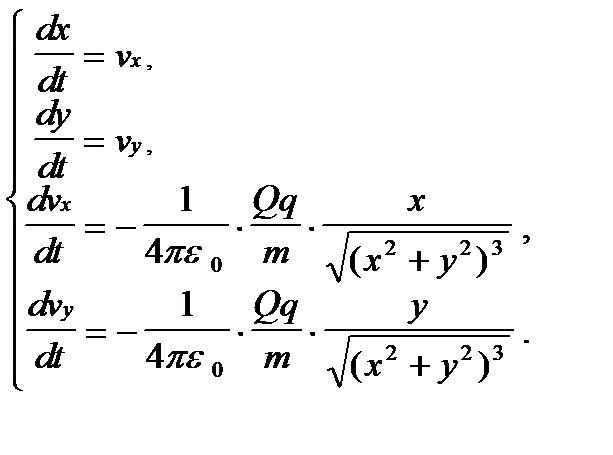
Движение заряженных частиц. Рассмотрим модель движения заряженной частицы в кулоновском поле другой заряженной частицы, положение которой фиксировано.
В системе координат, начало которой привязано к «большому» телу, дифференциальные уравнения модели имеют вид
 (8)
(8)
Они получаются из второго закона Ньютона и закона Кулона.  = 0,85 . 10-12 ф/м ¾ электрическая постоянная. Знак “-” в двух последних уравнениях соответствует разноименно заряженным частицам; в случае одноименных зарядов он меняется на “+”. Здесь q и Q ¾ соответственно заряды движущейся и закрепленной частиц; m ¾ масса движущейся частицы; x и y - координаты движущейся частицы; v x , vy - величины проекций скорости v движущейся частицы.на горизонтальную и вертикальную оси;
= 0,85 . 10-12 ф/м ¾ электрическая постоянная. Знак “-” в двух последних уравнениях соответствует разноименно заряженным частицам; в случае одноименных зарядов он меняется на “+”. Здесь q и Q ¾ соответственно заряды движущейся и закрепленной частиц; m ¾ масса движущейся частицы; x и y - координаты движущейся частицы; v x , vy - величины проекций скорости v движущейся частицы.на горизонтальную и вертикальную оси;
Метод Эйлера решения обыкновенных дифференциальных уравнений. Рассмотрим задачу Коши: Найти решение  дифференциального уравнения
дифференциального уравнения  для
для  при начальном условии
при начальном условии  . Для численного решения уравнения проведем дискретизацию следующим простейшим способом: заменим непрерывные промежутки изменения t и y дискретными множествами значений, непрерывные функции –дискретными, производную – конечноразностным отношением. Получим :
. Для численного решения уравнения проведем дискретизацию следующим простейшим способом: заменим непрерывные промежутки изменения t и y дискретными множествами значений, непрерывные функции –дискретными, производную – конечноразностным отношением. Получим :  откуда получаем разностную схему Эйлера:
откуда получаем разностную схему Эйлера:
 (9)
(9)
Здесь отрезок  разбит на n равных частей длиной
разбит на n равных частей длиной  , так что
, так что  .
.
Вопрос о выборе конкретного значения весьма непрост и определяется следующими соображениями. При компьютерном моделировании можно получить решение задачи о движении тела на некотором дискретном множестве значений t 0 , t 0 + D t, …, t 0 +( n -1) D t. Чем больше величина Dt, тем меньшая точность в передаче значений непрерывных функций их дискретными представлениями. Однако, уменьшение шага Dt не всегда ведет к улучшению результатов моделирования. Одна из причин заключается в том, что чем меньше шаг, тем больше арифметических действий, ведущих к увеличению глобальной погрешности округления. Более эффективными при моделировании процессов, описываемых дифференциальными уравнениями, являются методы Эйлера-Коши или Рунге-Кутта более высокого порядка аппроксимации, чем метод Эйлера.
|
|
Пример выполнения задания
Задача. Парашютист спрыгивает с высоты h0 и раскрывает парашют на высоте h1. Определить, будет ли скорость приземления безопасной.
Цель моделирования. Определить конечную скорость движения тела и сравнить ее с безопасной (10 м/с).
Формализация. Будем считать, что форма человека близка к сферической, форма парашюта – полусферической. Тело характеризуется массой m, радиусом (r- человека и r1 – парашюта) и площадью поперечного сечения ( S и S1 соответственно). Среда характеризуется плотностью ρ и вязкостью μ. В ходе движения меняются время t, скорость v и высота h. Задача состоит в том, чтобы определить vкон в момент времени, когда h станет близкой к нулю.
Построение математической модели. Воспользуемся моделью (2):
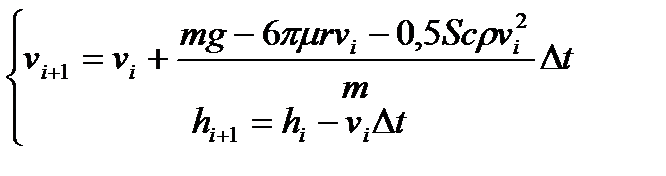
Выбор метода исследования. Применим для решения системы дифференциальных уравнений метод Эйлера:
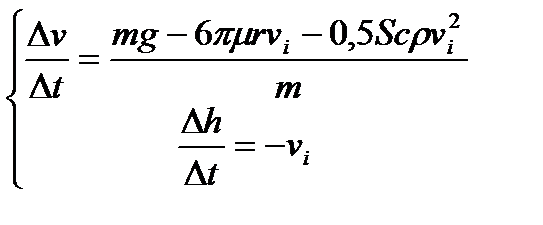 ;
; 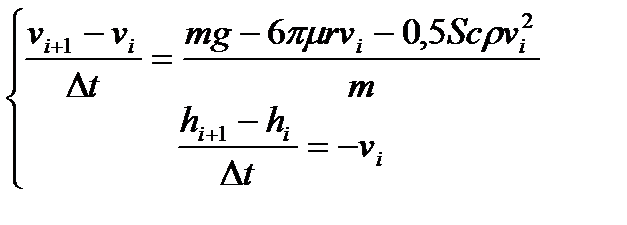 ;
; 
Построение компьютерной модели и ее проверка Выберем для моделирования среду табличного процессора Excel. Для проверки модели на адекватность рассмотрим движение без сопротивления среды (k 1 =0 и k 2 =0)
| Свободное падение тела | |||||||
|
Параметры движения |
Параметры тела |
Параметры среды |
Коэффициенты | ||||
| Время t0 | 0 | Масса m | 80 | Вязкость | 0,0182 | k1 | 0,000 |
| Скорость v0 | 0 | Радиус r | 0,3 | Плотность | 1,2 | k2 | 0,000 |
| Высота h0 | 1000 | Радиус r1 | 1,5 |
|
| ||
| Высота h1 | 800 | Площадь S | 0,053 |
|
|
| |
| Шаг ∆t | 0,5 | Площадь S1 | 7,069 |
|
|
|
|
|
|
| Коэффициент с | 0,40 |
|
|
|
|
|
|
| Коэффициент с1 | 0,55 |
|
|
|
|
Рис. 2 Исходные данные задачи о свободном падении (сопротивление среды не учитывается)
Изменение скорости и высоты со временем
| t | v | h | |||
| 0 | 0 | 1000
| |||
| 0,5 | 4,9 | 1000,0 | |||
| 1 | 9,8 | 997,6 | |||
| 1,5 | 14,7 | 992,7 | |||
| 2 | 19,6 | 985,3 | |||
| 2,5 | 24,5 | 975,5 | |||
| 3 | 29,4 | 963,3 | |||
| 3,5 | 34,3 | 948,6 | |||
| 4 | 39,2 | 931,4 | |||
| 4,5 | 44,1 | 911,8 | |||
| 5 | 49,0 | 889,8 | |||
| 5,5 | 53,9 | 865,3 | |||
| 6 | 58,8 | 838,3 | |||
| t | v | h | |||
| 6,5 | 63,7 | 808,9 | |||
| 7 | 68,6 | 777,1 | |||
| 7,5 | 73,5 | 742,8 | |||
| 8 | 78,4 | 706,0 | |||
| 8,5 | 83,3 | 666,8 | |||
| 9 | 88,2 | 625,2 | |||
| 9,5 | 93,1 | 581,1 | |||
| 10 | 98,0 | 534,5 | |||
| 10,5 | 102,9 | 485,5 | |||
| 11 | 107,8 | 434,1 | |||
| 11,5 | 112,7 | 380,2 | |||
| 12 | 117,6 | 323,8 | |||
| 12,5 | 122,5 | 265,0 | |||
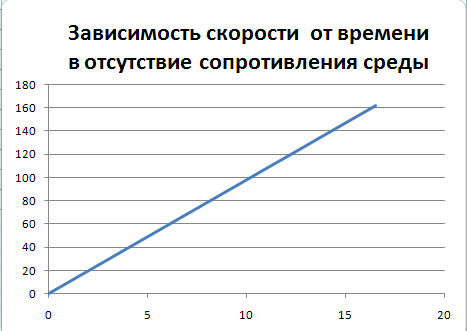
В отсутствие сопротивления среды скорость растет со временем по линейному закону, что соответствует аналитическому решению уравнений
Добавим силу сопротивления ( и  )
)
|
Свободное падение тела с учетом сопротивления | |||||||
|
Параметры движения |
Параметры тела |
Параметры среды |
Коэффициенты (без парашюта) | ||||
| Время t0 | 0 | Масса m | 80 | Вязкость | 0,0182 | k1 | 0,045 |
| Скорость v0 | 0 | Радиус r | 0,3 | Плотность | 1,2 | k2 | 0,013 |
| Высота h0 | 1000 | Радиус r1 | 1,5 |
|
|
Коэффициенты (с парашютом) | |
| Высота h1 | 800 | Площадь S | 0,053 |
|
| k1 | 0,515 |
| Шаг ∆t | 0,5 | Площадь S1 | 7,069 |
|
| k2 | 2,333 |
|
|
| Коэффициент с | 0,40 |
|
|
|
|
|
|
| Коэффициент с1 | 0,55 |
|
|
|
|
|
|
|

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!