ГЛАВА 11
СИСТЕМА ВРАЩЕНИЯ И НАКЛОНА АНТЕННЫ. СИСТЕМА ПЕРЕДАЧИ АЗИМУТА
НАЗНАЧЕНИЕ, РЕЖИМЫ РАБОТЫ,
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ И СОСТАВ СИСТЕМЫ ВРАЩЕНИЯ И НАКЛОНА АНТЕННЫ
Система вращения и наклона антенны (СВНА) предназначена для вращения антенны в горизонтальной плоскости и наклона стрел антенны в вертикальной плоскости.
Система вращения антенны (СВА) имеет следующие режимы работы:
1. Автономная работа СВА в режиме кругового вращения со скоростями 2±0,2 об/мин, 4±0,2 об/мин, 6±0,3 об/мин и стабильностью скорости вращения ±5%.
Данный режим применяется для поиска и обнаружения целей. Скорость 4 об/мин является основной скоростью вращения антенны и используется при поиске и обнаружении целей на всех высотах. Скорость 6 об/мин применяется при поиске и обнаружении маловысотных целей. Скорость 2 об/мин применяется при поиске высотных целей, а при обнаружении включается скорость 6 об/мин.
В автономном режиме кругового вращения РЛС П-18 может быть использована в качестве ведущей РЛС для других станций и высотомера ПРВ-13.
2. Автономная работа СВА в режиме плавного изменения скорости от 0,3 до 6 об/мин с реверсированием направления вращения. Кроме того, в этом режиме можно включить замедленную скорость от 0 до 3 об/мин для снятия диаграммы направленности антенны в вертикальной плоскости по радиоизлучению солнца.
Режим плавного изменения скорости применяется для настройки схемы компенсации ветра аппаратуры СПЦ, поиска целей в секторе, уточнения характеристик целей, а также может быть использован для поиска и обнаружения целей.
3. Работа СВА в режиме слежения за антенной сопрягаемой РЛС. В этом режиме антенна РЛС П-18 повторяет вращение ведущей РЛС.
Данный режим применяется при сопряжении с другими РЛС для совмещения воздушной обстановки на экране индикатора от сопрягаемых станций и оперативного подключения одной из сопрягаемых РЛС к АСУ.
СВА обеспечивает вращение антенны при следующих ветровых нагрузках и гололеде:
при скорости ветра до 20 м/с без гололеда обеспечивается работа на скоростях 2; 4 и 6 об/мин;
при скорости ветра до 30 м/с без гололеда — 2 об/мин;
при скорости ветра до 10 м/с и гололеде толщиной до 10 мм— 2; 4 и 6 об/мин.
Система наклона антенны служит для наклона антенны в вертикальной плоскости в диапазоне углов от —5 до +15° (см. гл. 3, § 1).
Состав СВНА (рис. 11.1):
1. Силовой привод. Обеспечивает автономную работу СВА в режимах кругового вращения и плавного изменения скорости и включает:
блок коммутации СВА (блок 32);
электромашинный усилитель ЭМУ (блок 41);
привод вращения антенны (блок 31).
С приводом вращения (блок 31) механически связаны и конструктивно размещены на нем блок сельсинов-приемников (блок 29) и блок сельсинов-датчиков (блок 28). С блока сельсинов-приемников в этих режимах выдаются напряжения синхронизации по вращению на сопрягаемые ведомые изделия. Блок сельсинов-датчиков обеспечивает передачу напряжения, пропорционального углу поворота антенны на устройства станции.
Кроме того, в приводе вращения конструктивно размещен электродвигатель наклона антенны.
2. Аппаратура, обеспечивающая режим слежения станции за антенной ведущей РЛС. В состав аппаратуры входят:
промежуточная синхронная передача (ПСП), состоящая из блока сервоусилителя ПСП (блок 91) и блока серводвигателя (блок 92);
сервоусилитель силового следящего привода (блок 94);
блок питания (блок 96), служащий для питания блоков 91 и 94;
блок сельсинов-приемников (блок 29).
Блоки 91, 94 и 96 конструктивно размещены в шкафу 3 (рис. 1.5).
ПРИНЦИП РАБОТЫ СВНА
Автономная работа СВА в режиме кругового вращения со скоростями 2; 4 и 6 об/мин
Для включения этого режима на АПУ-1 (блок 11) или ВПУ-1 (блок 22) нажимается соответствующая кнопка 2; 4; 6. В блок коммутации СВА поступает соответствующая команда управления (рис. 11.1). По этой команде с блока 32 на ЭМУ (блок 41) выдается управляющее напряжение, пропорциональное включенной скорости вращения. ЭМУ усиливает поступающее напряжение. Усиленное напряжение с ЭМУ подается на электродвигатель Ml привода
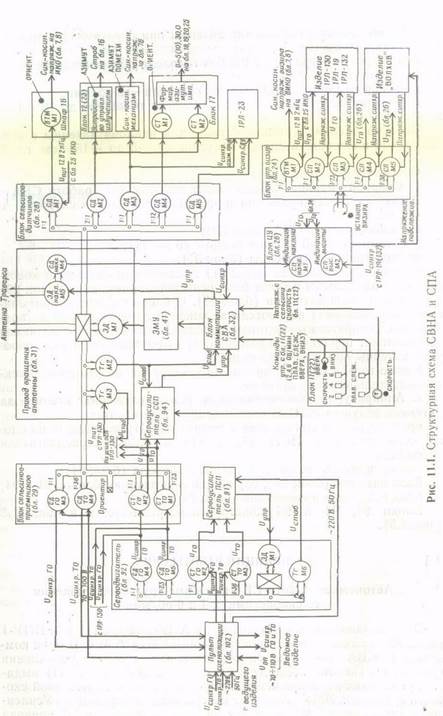
вращения антенны (рис. 11.2). Электродвигатель начинает вращаться с заданной скоростью и через редуктор вращать антенну. Одновременно через редуктор приходят во вращение сельсины, расположенное в блоках 28 и 29 и тахогенераторы М2, МЗ. С тахогенератора М2 снимается напряжение стабилизации, пропорциональное скорости вращения антенны, и подается в блок 32 для стабилизации скорости вращения.
Рис. 11.2. Привод вращения антенны
При работе РЛС П-18 в качестве ведущей с сельсинов-датчиков грубого и точного отсчетов (СД ГО МЗ, СД ТО М4) блока 29 напряжения синхронизации через пульт сигнализации (блок 102) поступают на ведомое сопрягаемое изделие. Передаточное отношение сельсинов-датчиков МЗ и М4 равно 1:36. Для питания сельсинов-датчиков опорное напряжение 70-110 В поступает через пулы
сигнализации от сопрягаемого изделия.
При сопряжении с радиовысотомером ПРВ-13 для его работы в дальномерном режиме с сельсинов-датчиков высотомера подается
напряжение синхронизации грубого и точного отсчета на сельсины-трансформаторы М2, Ml блока 29 (СТ ГО М2, СТ ТО Ml). Сельсины-трансформаторы ГО и ТО связаны передаточным отношением 1:23. С сельсинов-трансформаторов напряжение рассогласования (Uто, Uго) поступает на радиовысотомер ПРВ-13. Для стабилизации скорости вращения высотомера с тахогенератора МЗ блока 31 на радиовысотомер передается напряжение стабилизации.
Пои работе РЛС П-18 в режиме слежения сельсины-трансформаторы Ml М2 блока 29 используются для обеспечения режима слежения.






