Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...



 .
.


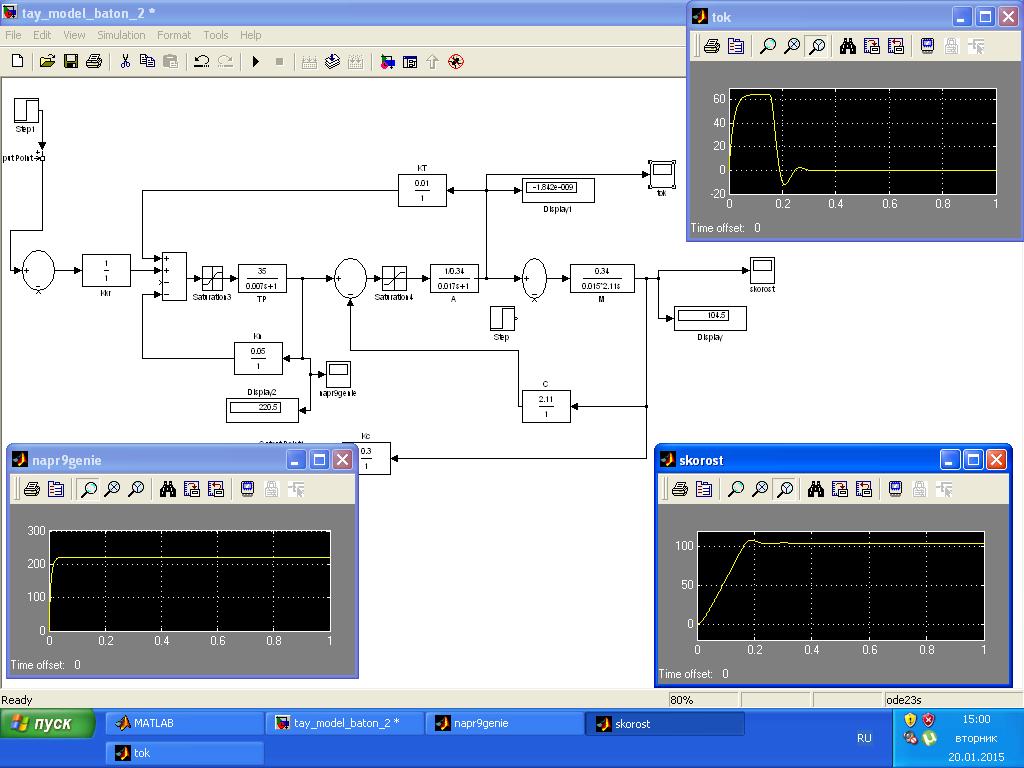
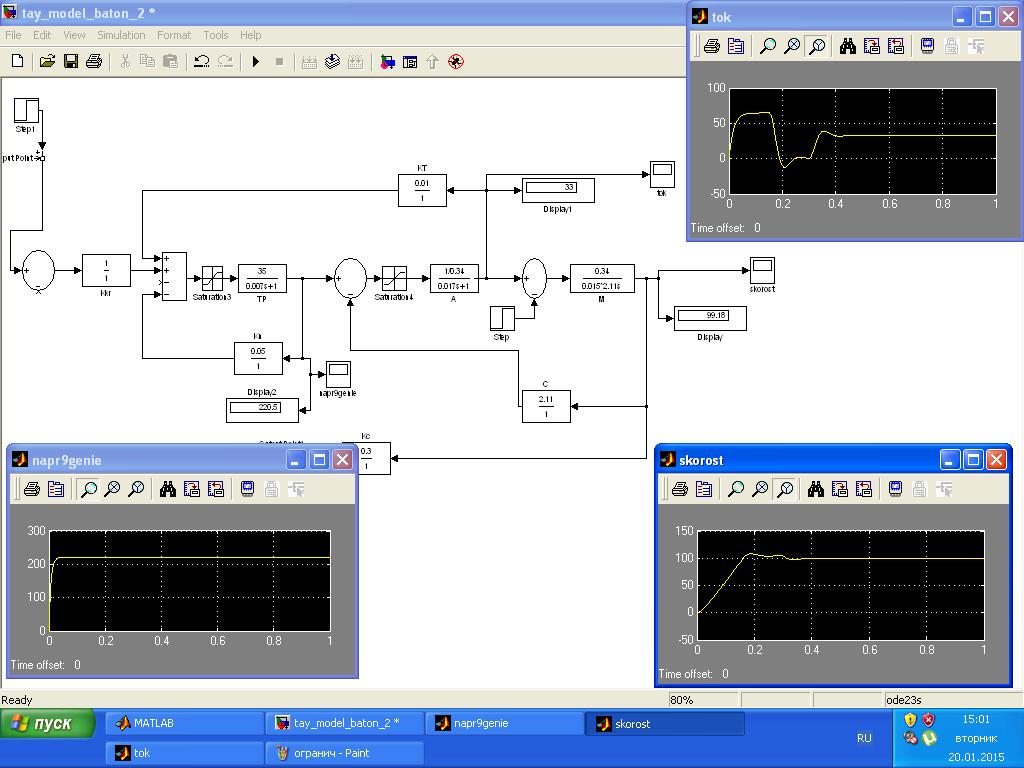

 - выполняется:
- выполняется:
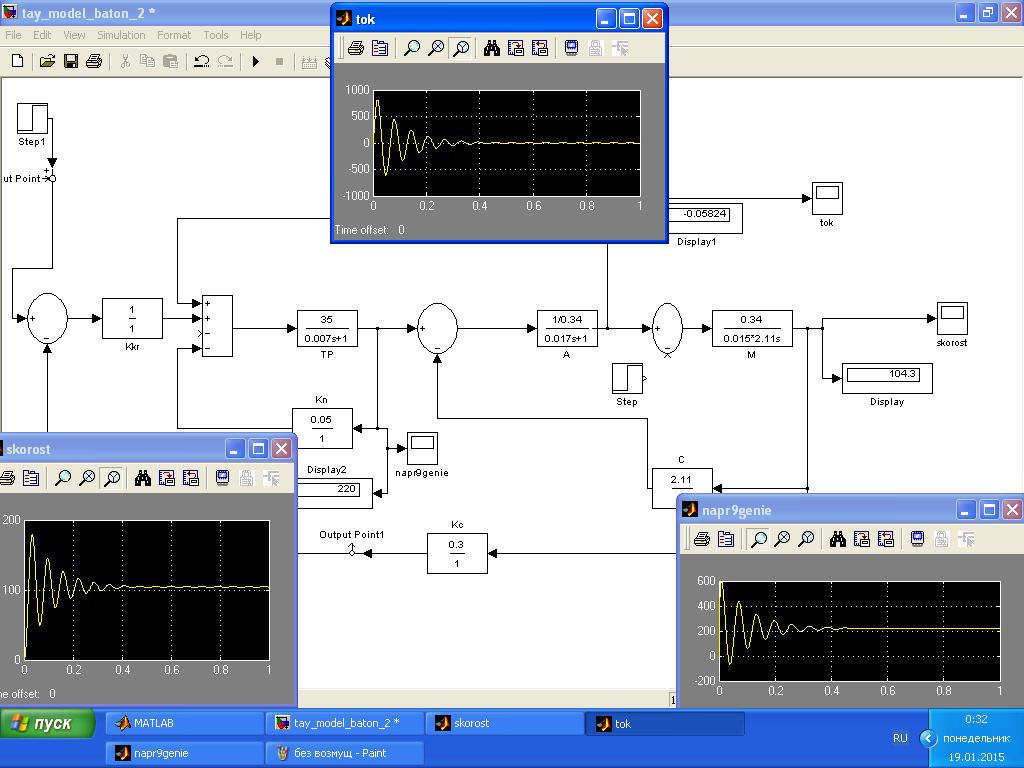
 - не укладываемся в допустимые пределы;
- не укладываемся в допустимые пределы; ;
;