Причины нелинейности уравнений, описывающих УР, определяющие невозможность прямого аналитического решения систем уравнений. Метод Ньютона для решения систем алгебраических уравнений. (С оглядкой на 1ый вопрос).

Метод Ньютона



Математические модели обобщенного узла и ветви схемы замещения ЭЭС. Виды узлов ЭЭС и параметры режима, которые должны быть заданы для расчёта УР.
Узел

Типы узлов:
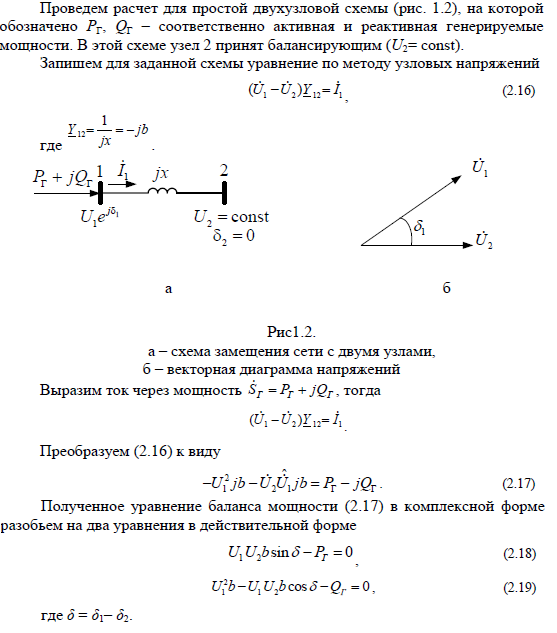
Балансирующий узел – это узел, балансирующий по мощности и базисный по напряжению. Для такого узла задаются модуль и фаза напряжения (фаза считается равной нулю) и рассчитываются активная и реактивная мощности.

Генераторный узел – имеет фиксированные модуль напряжения U и активную мощность Pг (PU-модель). Рассчитываемыми параметрами для него являются фаза напряжения и реактивная мощность Qг. Задание постоянного модуля напряжения при Qг = var соответствует реальным условиям работы генераторов, оборудованных регуляторами возбуждения, поддерживающими напряжение генератора примерно постоянным.

Нагрузочный узел – имеет фиксированные активную и реактивную мощности. Рассчитываемыми параметрами являются модуль и фаза напряжения узла.

Ветвь


Модели генераторов в расчетах УР: PU-модель и PQ-модель. Сравнительная оценка PU и PQ моделей. Причины, определяющие максимальную и минимальную реактивную мощности генератора. Учет ограничений по реактивной мощности в современных средствах для расчетов УР.
PU -модель
Генерирующий узел представляется постоянной активной мощностью (Pг) и модулем напряжения в узле (Uг). Активная мощность генератора постоянна и не зависит от режима сети (напряжения в узле). Для поддержания заданного модуля напряжения изменяется реактивная мощность генератора в пределах регулировочного диапазона (регулируемый генератор).
Независимыми (свободными) параметрами являются значение реактивной мощности (Qг) и угол напряжения в узле (δг). При выходе на ограничения по реактивной мощности фиксируется ее граничное значение, свободными параметрами режима становятся модуль и угол напряжения (переход к PQ-модели). PU-генераторы участвуют в сведении баланса реактивной мощности в схеме. Такие узлы называют балансирующими по реактивной мощности.
PQ -модель
Генерирующий узел представляется постоянной активной (Pг) и реактивной (Qг) мощностями. Реактивная мощность генератора постоянна и не зависит от режима сети (напряжения в узле), поэтому такой генератор называют нерегулируемым.
Независимыми (свободными) параметрами являются модуль (Uг) и угол напряжения в узле (δг).
Сравнительная оценка PU и PQ -моделей
Представление генератора постоянной по величине активной мощностью (Pг=const) соответствует реальным условиям работы генераторов в электрической системе; она может поддерживаться за счет регулирования частоты на генераторах.
Представление генератора постоянной по величине реактивной мощностью (Qг=const) не соответствует реальной модели генератора в электрической системе, т.к. изменение напряжение в узле приводит к изменению выработки/потреблению реактивной мощности генератора за счет действия автоматического регулятора возбуждения (АРВ).
PQ-модель может использоваться в тех случаях, когда необходимо принять предельное допустимое значение реактивной мощности генератора или в качестве показательной (характерной) модели генератора при обучении с теоретическим расчетом установившихся режимов работы.
Реальный режим работы генератора отражает PU-модель, т. к. можно считать, что Uг поддерживается почти неизменным за счет действия АРВ, а Pг определяется загрузкой турбины и от электрического режима не зависит.
PU-модель правильно отражает свойства реального генератора только до тех пор, пока не наступают ограничения по реактивной мощности и не происходит переход на РQ-модель. В свою очередь РQ-модель не отражает свойства реального объекта, так как фактически режим ограничивается не реактивной мощностью, а Eq на уровне Eqmin и Eqmax.
Генератор при этом в отличие от РQ-модели продолжает участвовать в балансировании реактивной мощности. В частности, реактивная мощность генератора будет изменяться, например, при изменении напряжения в сети.
Причины, определяющие Q г max и Q г min. Учёт ограничений.
При использовании PU-модели задаются Qг max и Qг min. Если в процессе расчета реактивная мощность достигает предельного значения по максимуму или минимуму, то автоматически происходит переход на PQ-модель с фиксацией реактивной мощности соответственно на уровне Qг max и Qг min. Достижение предельных значений по реактивной мощности означает, что заданное значение напряжения генератора не может поддерживаться при заданном значении активной мощности.
Практически, при эксплуатации, режим работы генератора контролируется не по реактивной мощности, а по току статора и ротора.
Располагаемая реактивная мощность турбогенератора при заданных активной мощности, напряжении статора и нормальной частоте – это максимальная реактивная мощность, которую турбогенератор может отдать в сеть без перегрузки по току статора и по току ротора.
Предельная реактивная мощность турбогенератора по току статора – это реактивная мощность, вычисленная из условия допустимой нагрузки статора турбогенератора, даже если бы при данных условиях для ее получения пришлось перегрузить ротор сверх допустимых пределов.
Предельная реактивная мощность турбогенератора по току ротору – это реактивная мощность, вычисленная из условий допустимой нагрузки ротора турбогенератора, даже если бы при данных условиях для ее получения пришлось перегрузить статор сверх допустимых пределов.
Располагаемая реактивная мощность турбогенератора определяется наименьшим из значений предельных реактивных мощностей.
Режим поддержания заданного напряжения при определенной активной мощности возможен лишь до тех пор, пока не будут достигнуты предельные значения:
– по току статора (IГ ≤ Iдоп),
– потокуротора (If min ≤ If ≤ If max).
Необходимость ограничения токов статора и ротора по максимуму определяется условиями охлаждения обмоток.
Ограничение тока ротора по минимуму необходимо по двум причинам:
– для предотвращения перегрева торцевых зон обмотки статора.
– для предотвращения нарушения устойчивости при глубоком снижении тока возбуждения по внутреннему пределу статической устойчивости генератора.
Асинхронной нагрузка
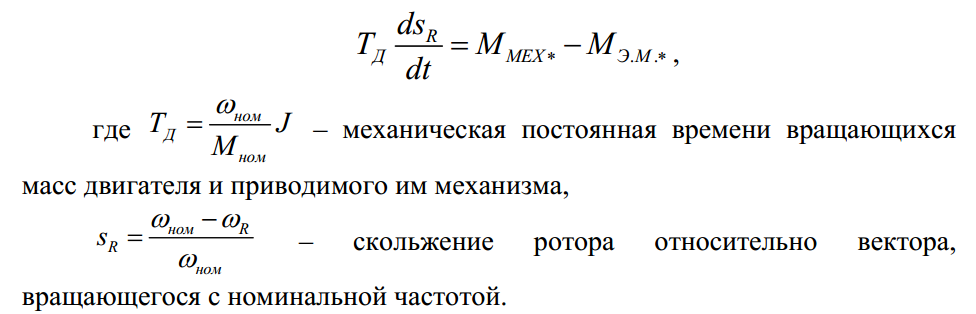
При анализе процессов в асинхронном двигателе используется обычно
не частота вращения, а скольжение, которое получается, если неподвижная
ось отсчета заменяется вектором, вращающимся с определенной частотой.
Эта замена целесообразна в связи с тем, что электромагнитный момент
определяется скольжением ротора относительно вектора напряжения,
приложенного к двигателю.
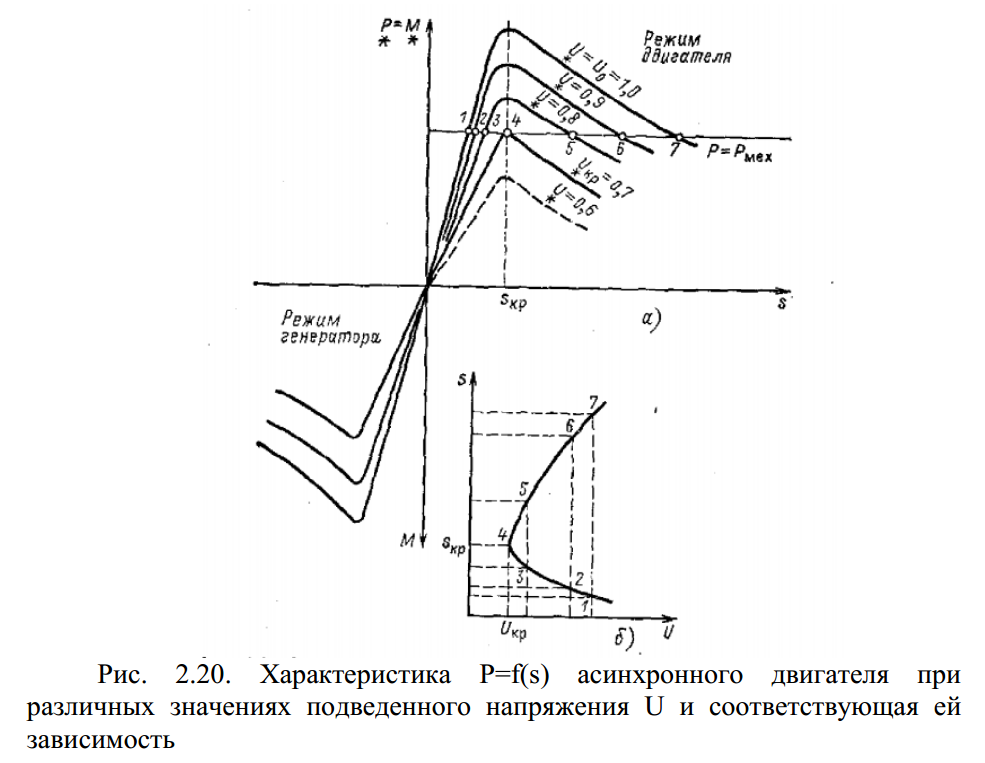
 В зоне устойчивых режимов активная мощность, потребляемая асинхронным двигателем, слабо изменяется при изменении напряжения:
В зоне устойчивых режимов активная мощность, потребляемая асинхронным двигателем, слабо изменяется при изменении напряжения:
В зоне неустойчивых режимов, когда двигатель затормаживается
вплоть до полной остановки, активная мощность снижается, так как при ω R =0 Р МЕХ = 0 и мощность, потребляемая асинхронным двигателем, определяется
только потерями
Зависимость реактивной мощности асинхронного двигателя от напряжения:
Реактивная мощность состоит из двух составляющих
Q Д = Q K + Q m(2.11)
Первая составляющая – реактивная мощность, выделяемая на
сопротивлении х К
Вторая составляющая Q m– реактивная мощность намагничивания.
Ветвь намагничивания асинхронного двигателя x mнелинейная.
С оставляющая Q K также пропорциональна току в
квадрате. Таким образом, характер изменения Q K и s одинаков. Зависимости
Q K (U) и s(U) показаны на рис. 2.21.


При снижении напряжения до U KP имеет место
лавинообразное увеличение потребляемой реактивной мощности.
Составляющая Q mв соответствии с (2.14) из-за нелинейности
характеристики холостого хода зависит от напряжения в степени выше
второй. Вид зависимости Q m(U) показан на рис. 2.22.
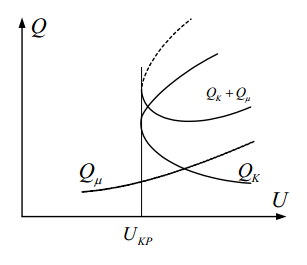
Здесь же приведен график суммарной реактивной мощности,потребляемой двигателем при изменении напряжения. Пунктиром выделенучасток неустойчивого режима, когда рост реактивной мощности вызываетдополнительное снижение напряжения и процесс приобретаетлавинообразный характер
Зависимость активной мощности асинхронного двигателяот частоты:
Зависимость активной мощности, потребляемой асинхроннымдвигателем, в основном определяется зависимостью механического моментаприводимого механизма от частоты вращения, так как без учета потерь в двигателе P Д = P МЕХ = М МЕХ w R.
Механический момент в свою очередь также может зависеть от частотыв степени выше первой. Если пренебречь изменением скольжения s приизменении частоты напряжения, приложенного к двигателю, то, как следуетиз (2.8), w R =w(1- s). Таким образом, можно принять, что активнаямощность, потребляемая двигателем,
P Д =w М МЕХ.
Зависимость реактивной мощности асинхронного двигателяот частоты:
 .
.
Составляющая Q m, как следует из (2.14), напротив, уменьшается сростом частоты и возрастает с уменьшением частоты
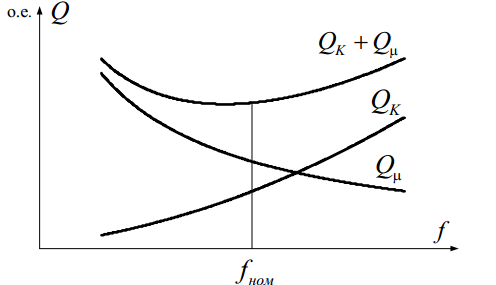
При их построении учтено обстоятельство, что характер изменениярезультирующей реактивной мощности при малых отклонениях частотыопределяется составляющей Q m, а при значительном росте частоты –составляющей QK.
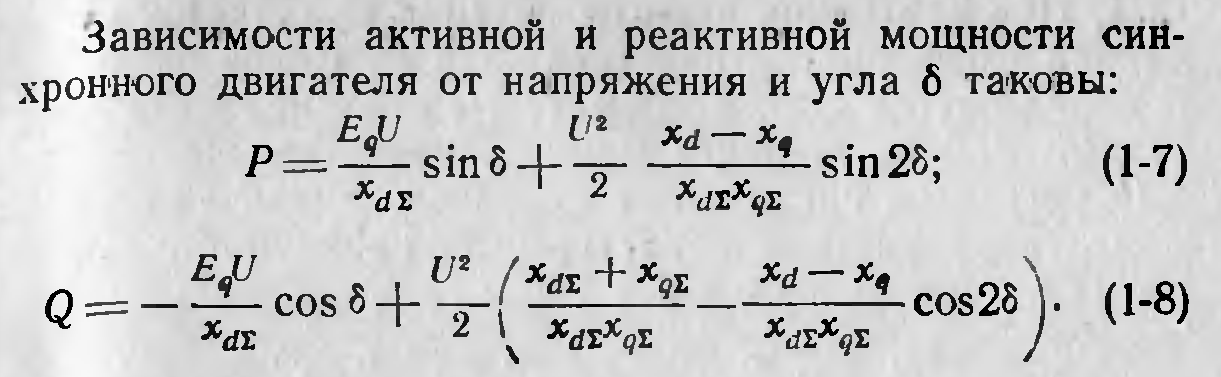
Статические характеристики синхронных генераторов:

Статические характеристики комплексной нагрузки:
Зависимость активной мощности комплексной нагрузки от
частоты и напряжения:
Зависимость активной мощности комплексной нагрузки от частоты обусловлена наличием в ее составе двигательной нагрузки!Степень зависимости активной мощности двигателей от частоты в свою очередь зависит от крутизны моментно-скоростных характеристик механизмов, вращаемых двигателями.
Зависимость активной мощности комплексной нагрузки от напряжения, напротив, определяется ее статической частью, так как активная мощность, потребляемая асинхронным двигателем, очень слабо зависит от частоты, а активная мощность синхронных двигателей от напряжения вообще не зависит. 
Требования к послеаварийному режиму после действия нормативных возмущений
Нормативные возмущения – наиболее тяжелые возмущения, которые учитываются в требованиях к устойчивости энергосистем. Делятся на:
1) КЗ с отключением элементов сети:
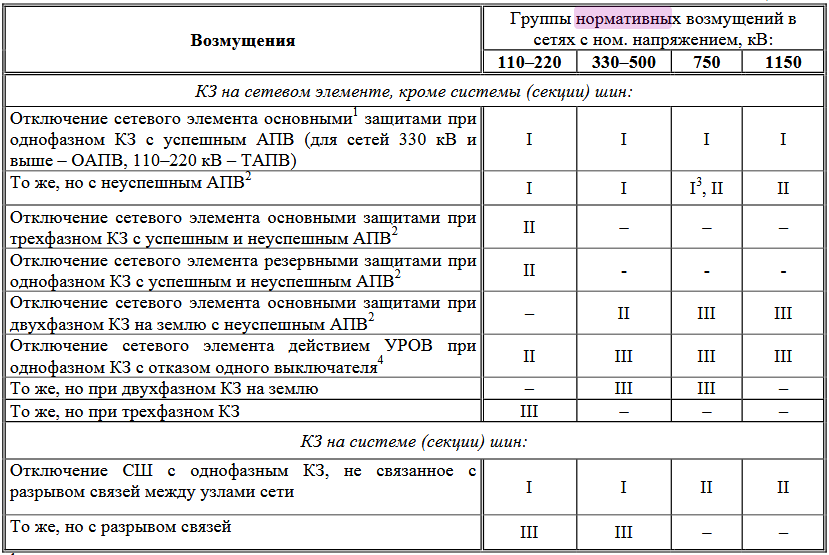
2) Скачкообразный аварийный небаланс активной мощности по любым причинам: отключение генератора или блока генераторов с общим выключателем, крупной подстанции, вставки постоянного тока или крупного потребителя и др.
Распределение небалансов о группам возмущений:
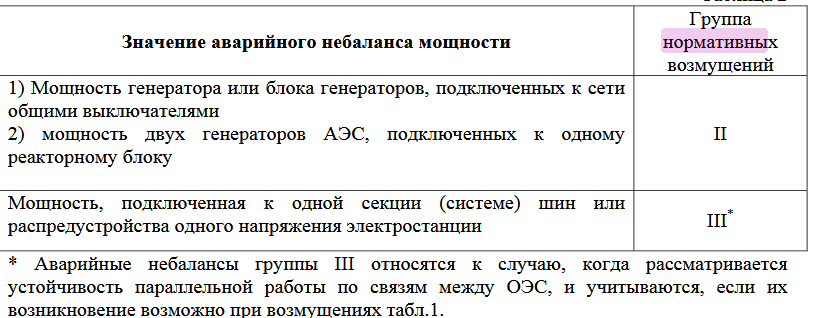
В III группу также включаются:
1) одновременное отключение двух ВЛ, расположенных в общем коридоре более, чем на половине длины более короткой линии, в результате возмущения группы I таблицы 1 (КЗ).
2) возмущения групп I и II отключением элемента сети или генератора, которые вследствие ремонта одного из выключателей, приводят к отключению другого элемента сети или генератора, подключенных к тому же РУ.
Если самозапуск двигателей крупного потребителя может вызвать значительное снижение U на ПС энергосистемы, то возмущение, приводящее к этому, относится к группе I.
П. 3.4.Послеаварийный режим после нормативных возмущений должен удовлетворять следующим требованиям:
- коэффициенты запаса по активной мощности - не менее 0,08;
- коэффициенты запаса по напряжению - не менее 0,1;
- токовые перегрузки сетевых элементов и генераторов не превышают значений, допустимых в течение послеаварийного режима.
Длительность послеаварийного режима определяется временем, необходимым диспетчеру для восстановления условий нормального режима, не большим 20 мин.
В течение этого времени возникновение дополнительных возмущений (т.е. наложение аварии на аварию) не учитывается.
Переток РМ должен быть таким, чтобы во всех послеаварийных схемно-режимных условиях, которые могут возникнуть в результате нормативных возмущений (ослабление сечения и/или аварийный небаланс мощности) с учетом действия ПА и/или первичного регулирования частоты, выполнялось первое требование п.3.4:


В каждом из нормативных послеаварийных режимов во всех узлах нагрузки коэффициент запаса по напряжению должен быть не менее 10%:

Переток РМ в послеаварийных режимах должен не приводить к токовым перегрузкам, превышающим допустимые значения:



Требования к уровням напряжений. Регулирование напряжения в распределительных сетях
Требование к уровням напряжений
Задача регулирования напряжения в электрических сетях – необходимо держать напряжение на шинах электростанций и у потребителей электрической энергии в определенных пределах.
Причинами отклонения напряжения являются:
а) потери напряжения, из-за нагрузочных токов, протекающими по элементам сети;
б) неправильный выбор сечений токоведущих элементов и мощности силовых трансформаторов;
в) неправильно построенные схемы сетей.
Нормально и предельно допустимые значения установившегося отклонения напряженияна выводах приемников электрической энергии, регламентируемые ГОСТ 32144-2013 равны 10%.
Наибольшие рабочие напряжения электрических сетей, определяемые надежностью работы изоляции, нормируются ГОСТ 721-77 в следующих пределах от номинального напряжения электрической сети
| Номинальное напряжение, кВ
| Максимальное отклонение
|
| 6,10
| 1.2Uном (7,2/12 кВ)
|
| 35,110
| 1,15Uном (40,5/126 кВ)
|
| 220,330
| 1,1Uном (252/363 кВ)
|
| 500 и выше
| 1,05Uном (525 кВ)
|
Минимально допустимые и аварийно-допустимые напряжения в узлах с мощными электродвигателями или с высокой долей электродвигательной нагрузки определяются нормируемыми коэффициенты запаса (Кзап) и критическими напряжениями (Uкр).
Uкр при отсутствии точных данных следует принимать равным 0,7Uном.
Коэффициенты запаса по напряжению в узлах электрической сети должны быть не менее:
– в нормальном режиме Кзап.норм = 1,15;
– в послеаварийном режиме: Кзап.п/ав =1,1.
При этом допустимые уровни напряжения составляют:
– минимально допустимое: Uмин.доп. = 1,15Uкр;
– аварийно допустимое: Uав.доп. = 1,1Uкр.
Наименьшие рабочие напряжения электрических сетей 110 кВ и выше, определяемые, главным образом, устойчивостью параллельной работы генераторов и узлов нагрузки, ограничиваются на уровне (0,8÷0,9)Uном.
Регулирование напряжения в распределительных сетях.
Регулирование напряжения – процесс изменения уровней напряжения в характерных точках электрической системы с помощью специальных технических средств - регулирующими устройствами. В распределительных сетях главная задача – это обеспечение у потребителя требуемых уровней напряжения, определяемых нормативными документами.
Причины нелинейности уравнений, описывающих УР, определяющие невозможность прямого аналитического решения систем уравнений. Метод Ньютона для решения систем алгебраических уравнений. (С оглядкой на 1ый вопрос).
Метод Ньютона
Математические модели обобщенного узла и ветви схемы замещения ЭЭС. Виды узлов ЭЭС и параметры режима, которые должны быть заданы для расчёта УР.
Узел
Типы узлов:
Балансирующий узел – это узел, балансирующий по мощности и базисный по напряжению. Для такого узла задаются модуль и фаза напряжения (фаза считается равной нулю) и рассчитываются активная и реактивная мощности.
Генераторный узел – имеет фиксированные модуль напряжения U и активную мощность Pг (PU-модель). Рассчитываемыми параметрами для него являются фаза напряжения и реактивная мощность Qг. Задание постоянного модуля напряжения при Qг = var соответствует реальным условиям работы генераторов, оборудованных регуляторами возбуждения, поддерживающими напряжение генератора примерно постоянным.
Нагрузочный узел – имеет фиксированные активную и реактивную мощности. Рассчитываемыми параметрами являются модуль и фаза напряжения узла.
Ветвь
Модели генераторов в расчетах УР: PU-модель и PQ-модель. Сравнительная оценка PU и PQ моделей. Причины, определяющие максимальную и минимальную реактивную мощности генератора. Учет ограничений по реактивной мощности в современных средствах для расчетов УР.
PU -модель
Генерирующий узел представляется постоянной активной мощностью (Pг) и модулем напряжения в узле (Uг). Активная мощность генератора постоянна и не зависит от режима сети (напряжения в узле). Для поддержания заданного модуля напряжения изменяется реактивная мощность генератора в пределах регулировочного диапазона (регулируемый генератор).
Независимыми (свободными) параметрами являются значение реактивной мощности (Qг) и угол напряжения в узле (δг). При выходе на ограничения по реактивной мощности фиксируется ее граничное значение, свободными параметрами режима становятся модуль и угол напряжения (переход к PQ-модели). PU-генераторы участвуют в сведении баланса реактивной мощности в схеме. Такие узлы называют балансирующими по реактивной мощности.
PQ -модель
Генерирующий узел представляется постоянной активной (Pг) и реактивной (Qг) мощностями. Реактивная мощность генератора постоянна и не зависит от режима сети (напряжения в узле), поэтому такой генератор называют нерегулируемым.
Независимыми (свободными) параметрами являются модуль (Uг) и угол напряжения в узле (δг).
Сравнительная оценка PU и PQ -моделей
Представление генератора постоянной по величине активной мощностью (Pг=const) соответствует реальным условиям работы генераторов в электрической системе; она может поддерживаться за счет регулирования частоты на генераторах.
Представление генератора постоянной по величине реактивной мощностью (Qг=const) не соответствует реальной модели генератора в электрической системе, т.к. изменение напряжение в узле приводит к изменению выработки/потреблению реактивной мощности генератора за счет действия автоматического регулятора возбуждения (АРВ).
PQ-модель может использоваться в тех случаях, когда необходимо принять предельное допустимое значение реактивной мощности генератора или в качестве показательной (характерной) модели генератора при обучении с теоретическим расчетом установившихся режимов работы.
Реальный режим работы генератора отражает PU-модель, т. к. можно считать, что Uг поддерживается почти неизменным за счет действия АРВ, а Pг определяется загрузкой турбины и от электрического режима не зависит.
PU-модель правильно отражает свойства реального генератора только до тех пор, пока не наступают ограничения по реактивной мощности и не происходит переход на РQ-модель. В свою очередь РQ-модель не отражает свойства реального объекта, так как фактически режим ограничивается не реактивной мощностью, а Eq на уровне Eqmin и Eqmax.
Генератор при этом в отличие от РQ-модели продолжает участвовать в балансировании реактивной мощности. В частности, реактивная мощность генератора будет изменяться, например, при изменении напряжения в сети.
Причины, определяющие Q г max и Q г min. Учёт ограничений.
При использовании PU-модели задаются Qг max и Qг min. Если в процессе расчета реактивная мощность достигает предельного значения по максимуму или минимуму, то автоматически происходит переход на PQ-модель с фиксацией реактивной мощности соответственно на уровне Qг max и Qг min. Достижение предельных значений по реактивной мощности означает, что заданное значение напряжения генератора не может поддерживаться при заданном значении активной мощности.
Практически, при эксплуатации, режим работы генератора контролируется не по реактивной мощности, а по току статора и ротора.
Располагаемая реактивная мощность турбогенератора при заданных активной мощности, напряжении статора и нормальной частоте – это максимальная реактивная мощность, которую турбогенератор может отдать в сеть без перегрузки по току статора и по току ротора.
Предельная реактивная мощность турбогенератора по току статора – это реактивная мощность, вычисленная из условия допустимой нагрузки статора турбогенератора, даже если бы при данных условиях для ее получения пришлось перегрузить ротор сверх допустимых пределов.
Предельная реактивная мощность турбогенератора по току ротору – это реактивная мощность, вычисленная из условий допустимой нагрузки ротора турбогенератора, даже если бы при данных условиях для ее получения пришлось перегрузить статор сверх допустимых пределов.
Располагаемая реактивная мощность турбогенератора определяется наименьшим из значений предельных реактивных мощностей.
Режим поддержания заданного напряжения при определенной активной мощности возможен лишь до тех пор, пока не будут достигнуты предельные значения:
– по току статора (IГ ≤ Iдоп),
– потокуротора (If min ≤ If ≤ If max).
Необходимость ограничения токов статора и ротора по максимуму определяется условиями охлаждения обмоток.
Ограничение тока ротора по минимуму необходимо по двум причинам:
– для предотвращения перегрева торцевых зон обмотки статора.
– для предотвращения нарушения устойчивости при глубоком снижении тока возбуждения по внутреннему пределу статической устойчивости генератора.






