Факультет информатика и управление (ИУ)
Кафедра Информационные системы и телекоммуникации (ИУ-3)
По курсу лекций «Основы теории управления
и цифровая обработка сигналов», 3-й курс, 5-й семестр.
Отчет
По домашнему заданию №1 (ДЗ-1, 2016)
“Проектирование системы управления алгебраическим методом”
Группа ИУ3-51, вариант № 14, d 0 = 500, A ж = (p2+2ηp+4η2) (p2+4ηp+8η2)
Выполнил: Сёмин К.А.
Дата получения задания: 13.09.17
Дата готовности:
Проверил: Коновалов А. В.
.
2017
Оглавление
Оглавление. 1
1. Цель работы. 2
2. Техническое задание. 2
Содержание работы.. 4
1. Определение структуры фильтра с учетом статических требований. 4
2. Вывод передаточной функции разомкнутой системы в общем виде. 6
3. Вывод передаточных функций замкнутой системы. 7
4. Характеристическое уравнение замкнутой системы. 8
5. Желаемое характеристическое уравнение замкнутой системы. 9
6. Расчет параметров фильтра. 9
7. Переходные процессы передаточных функций замкнутой системы. 10
8. АЧХ W1(p). 16
9. АЧХ W2(p). 17
10. ЛАХ и ЛФХ разомкнутой системы. 18
11. Сопоставление результатов. 19
12. Выводы: 20
Цель работы.
Освоение алгебраического метода теоретического проектирования автоматических систем управления и регулирования с заданными статическими и динамическими свойствами.
В зависимости от требований Технического задания необходимо выбрать:
· Выбрать структурную схему системы управления.
· Выбрать структуру и параметры фильтра.
· Исследовать статические и динамические свойства системы и доказать их соответствие требованиям Технического задания.
2. Техническое задание.
1. Назначение системы управления.
Система управления предназначена для поддерживания выходного параметра U вых равным (пропорциональным) управляющему сигналу U вх и нейтрализации внешних возмущений f, приложенных к объекту.
2. Передаточная функция объекта управления.

3. Структурная схема системы управления.
|
|
|
Рис. 1 Структурная схема системы управления.
|
4. Передаточная функция фильтра произвольного порядка:

Здесь kи v– порядки знаменателя и числителя фильтра соответственно. Структурой фильтра будем называть совокупность этих величин.
5. Суммирующие блоки
Суммирующие блоки в структурной схеме описываются соотношениями:
∆ = U вх – U вых (уравнение отрицательной обратной связи).
x = y + f (3)
Совокупность приведенных выше уравнений полностью описывает работу системы управления.
6. Статистические требования к системе управления.
При ступенчатых воздействиях по U вх и f установившееся значение ошибки ∆ должно быть равно нулю.
7. Динамические требования к системе.
Длительность Т переходных процессов должна быть порядка T ≈ (3…5)/η, где η – степень устойчивости системы (наименьшая вещественная часть среди корней характеристического уравнения).
8. Исходные данные, вариант № 14.
b0 = 2; d0 = 500; η = 10.
Содержание работы
1. Определим структуру фильтра (величины v и k) с учётом статических требований:
Передаточная функция W о (p) задана – неизменная часть системы

Здесь mи n –порядки полиномов числителя и знаменателя передаточной функции объекта (4) соответственно;
 и
и  – известные коэффициенты, причём
– известные коэффициенты, причём 
Последовательно с объектом включен корректирующий фильтр с передаточной функцией:
Здесьvиkпорядки полиномов числителя и знаменателя  соответственно
соответственно
giи ri– неизвестные коэффициенты, подлежащие определению из статических и динамических требований к системе управления, причём 
При заданном объекте попытаемся подобрать такой фильтр, который обеспечивал бы произвольное расположение корней характеристического уравнения замкнутой системы, то есть обеспечивал бы произвольное качество и длительность переходных процессов.
В соответствии со структурной схемой Рис. 1


Характеристическое уравнение замкнутой системы – знаменатель передаточной функции, приравненный к нулю:
 (7)
(7)
 (8),
(8),
где  – корни характеристического уравнения
– корни характеристического уравнения 
Порядок Nэтого уравнения равен сумме порядков полиномов знаменателей передаточных функций объекта ( ) и фильтра(
) и фильтра( )
)
Коэффициенты ajхарактеристического уравнения (7) связаны с корнями pjизвестными формулами Виета
 (10)
(10)
Отсюда (10) видно, что,задав желаемое расположение корней pjможно вычислить желаемое значение коэффициентов ajхарактеристического уравнения (7) замкнутой системы
В характеристическом уравнении (7) неизвестными являются коэффициенты полиномов  и
и  , соответственно, знаменатель и числитель передаточной функции фильтра (2)
, соответственно, знаменатель и числитель передаточной функции фильтра (2)
Приравнивая коэффициенты при одинаковых степенях p,можно получить систему для определения коэффициентов  и
и  фильтра.
фильтра.
Согласно статическим требованиямпри ступенчатых воздействиях по U вх и f установившееся значение ошибки ∆(t) должно быть равно нулю, значит передаточная функция  должна содержать интегратор (нулевой полюс) с передаточной функцией
должна содержать интегратор (нулевой полюс) с передаточной функцией  , то есть должна иметь следующий вид:
, то есть должна иметь следующий вид:
Если передаточная функция объекта  не содержит интегратора, значит интегратор должна содержать передаточная функция корректирующего фильтра
не содержит интегратора, значит интегратор должна содержать передаточная функция корректирующего фильтра  . Для выполнения этого условия необходимо равенство
. Для выполнения этого условия необходимо равенство  , тогда
, тогда

Необходимым условием разрешимости системы уравнений(10) является равенство числа уравнений  и числаNф неизвестных (свободных) коэффициентов фильтра, т. е.
и числаNф неизвестных (свободных) коэффициентов фильтра, т. е. 
В нашем случае  (12)
(12)
Из равенства  получим необходимый минимальный порядок
получим необходимый минимальный порядок  числителя фильтра:
числителя фильтра: 
Порядок  знаменателя фильтра произволен, но с учётом реализуемости фильтра:
знаменателя фильтра произволен, но с учётом реализуемости фильтра: 
Выберем фильтр наименьшего порядка:
 (13)
(13)
Исходя из выше сказанного, запишем передаточную функцию фильтра в общем виде:
 (14)
(14)
Объект, заданный выражением  имеет m = 0 и n = 2–порядки числителя и знаменателя соответственно, тогда
имеет m = 0 и n = 2–порядки числителя и знаменателя соответственно, тогда
 (15)
(15)
Для заданного объекта Wo(p) запишем выражение для передаточной функции корректирующего фильтра:

Расчет параметров фильтра.
Рассчитаем параметры фильтра при помощи характеристического уравнения.
Запишем характеристическое уравнение замкнутой системы и желаемое характеристическое уравнение.


Приравняем коэффициенты при соответствующих степенях p и составим систему уравнений, зависящих от параметров фильтра.
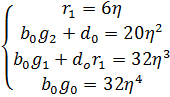
В данной системе неизвестны r 1, g 0, g 1 и g 2, а b0, d0и η заданы вариантом.
b0 = 2; d0 = 500; η = 10.
Решим данную системуи получим:
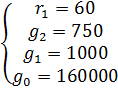
Запишем передаточную функцию фильтра.


Передаточная функция разомкнутой системы:


Сопоставление результатов
Сопоставим в одной таблице параметры переходных процессов и параметры частотных характеристик
11. Выводы:
Была спроектирована астатическая система управления, отслеживающая входное воздействие и нейтрализующая возмущающее воздействие. передаточная функция фильтра была выбрана исходя из статических и динамических требований системы управления. Теоретически и при моделировании в Simulink:
 и
и 
Из этого следует, что статические требования к системе управления выполнены.
В работе приведены графики переходных процессов, на основании каждого графика было подсчитано время переходного процесса и перерегулирование. Длительность переходных процессов в системе управления является одного порядка с заданным (T ≈ (3…5)/η=0,3…0,5 c), значит качество переходных процессов считаем удовлетворительным.
Также былпроведён анализ построенных амплитудно-частотных характеристик передаточных функций замкнутых систем W1(p) и W2(p) и логарифмические характеристик передаточных функций разомкнутой системы Wраз(p). Начальные и конечные значения АЧХ передаточных функций полностью соответствуют теоретическим расчётам, а наклон в области частоты среза передаточной функции разомкнутой системы составляет -20 дБ/дек. Последнее означает, что замкнутая система стабильна, и переходной процесс в ней близок к апериодическому.
Факультет информатика и управление (ИУ)
Кафедра Информационные системы и телекоммуникации (ИУ-3)












