Длительность τи принимаемых импульсов определяется путём сравнения ее с эталонными длительностями четырех временных стробов: τ1= 0,5 мкс; τ2=1,3 мкс; τЗ=2,1 мкс; τ4=5,3 мкс (рис. 14).
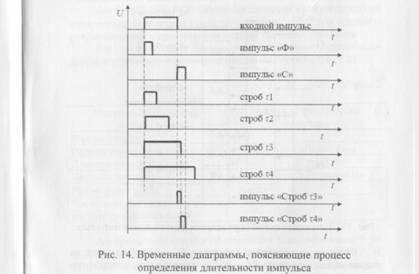
Длительность входного импульса характеризуется двумя импульсами («Ф» и «С»), которые соответствуют временному положению его фронта и среза. Фронт импульса «Ф» синхронизирован с фронтом временных стробов, а положение импульса «С» относительно стробов во времени сравнивается в логических элементах схемы, показанной на рис. 15.
Импульсы стробов поступают на вторые входы элементов «И» (&1 - &4), а на первые входы подается импульс «С». В зависимости от значения τи импульс «С» совпадает с одним или несколькими стробами, в результате чего на прямых выходах соответствующих элементов формируются сигналы совпадения (логической единицы). Наличие импульса совпадения на выходе элемента &1 (сигнал «Строб τ 1») означает, что τ и < 0,5мкс.
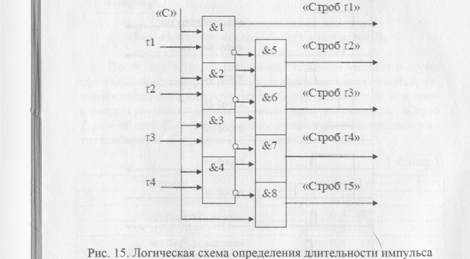
Сигналы совпадений с элементов &2 - &4 поступают на вторые входы элементов &5 - &7, на первые входы которых подаются сигналы запрета с инверсных выходов элементов &1 - &3. В результате логического сравнения на выходах элементов &5 - &7 формируются сигналы «Строб τ2» (0,5 мкс < τи < 1,3 мкс), «Строб τЗ» (1,3 мкс < τи < 2,1 мкс) и «Строб τ4» (2,1 мкс < τи < 5,3 мкс), соответственно. Сигнал «Строб τ5» вырабатывается на выходе элемента &8 при τи > 5,3 мкс.
Определение типов РЛС
Определение типов облучающих РЛС осуществляется в ходе циклического опроса азимутальных секторов. Опрос осуществляется коммутатором секторов с частотой 12,5 кГц. При наличии на выходе сектора сигналов «И» или «Н» опрос приостанавливается и производится определение типа РЛС по сигналам, принимаемым в данном секторе.
Тип импульсной РЛС определяется путем сравнения набора измеренных параметров принятого сигнала с набором параметров, записанных в программном устройстве блока обработки.
Для распознавания импульсных РЛС используются следующие параметры и соответствующие им сигналы (табл. 2).
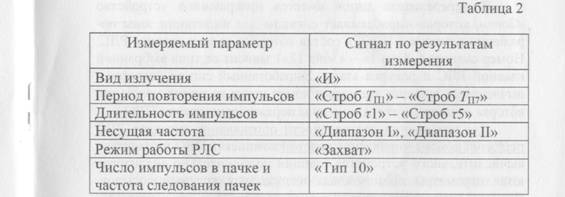
Алгоритм опознавания обеспечивает идентификацию 5 условных типов импульсных РЛС, обозначенных буквами: П, 3, Н, F, С. Так как параметры, по которым происходит опознавание, измеряются сравнительно грубо, к каждому из условных типов может быть отнесено несколько разных типов реальных РЛС вероятного противника, в том числе и средств нашей ПВО. Уточнение реального типа облучающей РЛС осуществляется экипажем на основании априорных разведанных о системе ПВО противника по маршруту полета (расположение средств, их типы, зоны обнаружения и т.п.).
Выявление соответствия конкретного набора сигналов одному из условных типов РЛС происходит в схемах совпадения, на которые подаются сигналы из программного устройства и сигналы, полученные в ходе обработки. Сначала анализируется соответствие сочетания длительности и периода следования импульсов одному из пяти условных типов. Если соответствие есть, то формируются сигналы «Импульс типа 1» - «Импульс типа 5», поступающие в схему определения типов, в которой дополнительно может учитываться информация о диапазоне несущих частот и режиме работы РЛС.
Когда разведанная информация не противоречит данным, заложенным в программу опознавания, определитель типа выдает один из сигналов «Тип1» - «Тип 5» на индикатор обстановки, где подсвечивается соответствующая зеленая метка: П, 3, Н, F, С.
В определителе типов имеется программное устройство «Зона», которое вырабатывает сигналы для индикации зоны поражения комплекса ПВО, в состав которого входит главная РЛС. Номер сигнала («Зона 1» - «Зона 12») зависит от типа выбранной главной РЛС и ракурса атаки. Выработанный сигнал подается в вычислитель времени, где задает номер метки на шкале мощности, которая соответствует границе зоны поражения комплекса ПВО.
Для повышения достоверности опознавания сигналов РЛСпередачи команд управления ракетой комплекса ПВО в селекторе вычислительного устройства станции дополнительно анализируются параметры принимаемых импульсных кодовых посылок. Для РЛС управления ракетой они состоят из двух пар импульсов, каждая длительностью 15 мкс с частотой повторения 500 Гц. При регистрации таких импульсных посылок селектор выдает сигнал «Тип 10», по которому на индикаторе обстановки подсвечивается метка условного типа «Н» и начинает мигать метка «Захват» с частотой 2 Гц.
РЛС с непрерывным излучением в алгоритме опознавания отнесены к одному условному типу «X», так как составляют значительно меньшую, по сравнению с импульсными РЛС, часть в составе средств ПВО. Поэтому единственным признаком для их определения служит сигнал «Н» на выходе любого приемного канала сектора. При этом на индикаторе обстановки сразу подсвечивается метка типа «X».
Для повышения достоверности опознавания обзорных РЛСс непрерывным излучением в селекторе вычислительного устройства дополнительно анализируется период обзора (скорость вращения антенны) РЛС. Это осуществляется путем регистрации совпадения принятых сигналов со стробами, задержанными относительно этих сигналов на Зс (скорость вращения антенны таких РЛС составляет порядка 20 ± 2 об/мин). Схема совпадения и графики, поясняющие её работу, показаны на рис. 16, где UH - напряжение сектора; Uзад - временной строб (задержанное на Зс напряжение UH); Uc - сигнал «Соответствие и» для условного типа РЛС «X».

Наборы данных по условным типам РЛС, хранимые в программном устройстве, могут быть изменены. Установка конкретного варианта данных осуществляется в соответствии с театром военных действий, разведданными о радиолокационной обстановке и средствах истребительной авиации. Сведения о вариантах данных указаны в паспорте станции, где приводится перечень РЛС, соответствующий каждому из 6 условных типов, высвечиваемых на индикаторе. Пример варианта данных (условный тип - конкретные типы РЛС) представлен в табл. 3.
Если облучающая РЛС не относится ни к одному из шести условных типов, то в устройство выбора главной РЛС из определителя типа выдается сигнал «Тип 7».
Таблица 3
| Услов
ный
тип
| Типы РЭС
|
| «П»
| Бортовые РЛС; РЛС АСУ корабельных ЗРК, имеющие режим одновременного сопровождения цели импульсной РЛС и подсвета ее передатчиком непрерывного излучения
|
| «3»
| РЛС АСУ наземных ЗРК и ЗСК
|
| «X»
| РЛС целеуказания на малых высотах и РЛС подсвета цели ЗРК
|
| «н»
| РЛС слежения за целью и управления ракетой
|
| «F»
| Бортовые РЛС, РЛС ЗСК и ЗРК, имеющие Fn > 8 кГц
|
| «С»
| Бортовые РЛС и корабельные РЛС ЗРК, работающие в режиме обзора
|





