

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Интересное:
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
(РКН)
Задачей баллистического анализа РКН является получение соотношений, установливающих взаимосвязь между координатами точки старта, азимутом прицеливания, параметрами целевой орбиты (или траектории назначения) и ПБП. Эти зависимости могут быть получены в виде дифференциальных уравнений движения, а также в виде аналичических соотношений, полученных на основании обработки результатов интегрирования уравнений движения. При этом переменные, входящие в систему уравнений движения, должны быть выражены в функции параметров баллистического подобия ПБП.
В общем случае, когда выведение ПН на целевую орбиту предполагается осуществлять путем формирования промежуточных орбит, баллистическую задачу можно представить в виде двух самостоятельных задач:
– задачу движения РН на участке прямого выведения орбитального блока на низкую опорную орбиту (НОО);
– задачу движения орбитального блока (ОБ) по промежуточным орбитам с выходом на целевую (или траекторию назначения).
Проектирование ракеты-носителя, как любой сложной технической системы, представляет собой длительный многоэтапный итерационный процесс. В связи с этим на начальном этапе разработок возникает потребность в универсальных проектировочных методиках баллистических расчетов, обеспечивающих совместно с уравнениями массового анализа выбор наилучшего сочетания ПБП, которые в дальнейшем используются в качестве исходных данных в задачах оптимизации более высокого уровня. Под проектно-баллистическими параметрами следует понимать минимальную совокупность относительных параметров, однозначно определяющих траекторию движения ракеты.
В предлагаемой работе конечные результаты предлагается представить в аналитической форме, поскольку подобные методики более эффективны в сравнении с высокоточными методами на ранних этапах разработок. Это объясняется следующими причинами: во-первых, несмотря на высокое быстродействие современных компьютеров, применение программных средств и алгоритмов высокого уровня может привести к неоправданным временным и материальным затратам; во-вторых, использование методов численного интегрирования в сложном алгоритме оптимизации может привести к потере контроля проектантом за процессом выбора наиболее рационального решения. Таким образом, методика проектно-баллистического расчёта должна, не прибегая к громоздким выкладкам и численному интегрированию, обеспечивать в аналитической форме взаимосвязь параметров движения с ПБП двухступенчатых и в общем случае многоступенчатых РН.
|
|
Для первых ступеней имеем пять независимых ПБП.
1. Относительную конечную массу первой ступени:
где  – конечная масса первой ступени;
– конечная масса первой ступени;  – стартовая масса ракеты.
– стартовая масса ракеты.
2. Удельный импульс тяги двигательной установки в пустоте:
где  – суммарная пустотная тяга двигательной установки первой ступени с учётом потерь характеристической скорости на управление;
– суммарная пустотная тяга двигательной установки первой ступени с учётом потерь характеристической скорости на управление;  – абсолютная постоянная величина массового секундного расхода топлива.
– абсолютная постоянная величина массового секундного расхода топлива.

Здесь  – относительная текущая масса первой ступени; t – время полёта.
– относительная текущая масса первой ступени; t – время полёта.
3. Коэффициент увеличения удельного импульса тяги в пустоте:
где  – суммарная тяга двигательной установки первой ступени у поверхности Земли с учётом потерь на органы управления;
– суммарная тяга двигательной установки первой ступени у поверхности Земли с учётом потерь на органы управления;  — земной удельный импульс тяги.
— земной удельный импульс тяги.
4. Стартовую нагрузку на тягу или коэффициент тяговооруженности:

где  – осреднённое по поверхности Земли ускорение свободного падения.
– осреднённое по поверхности Земли ускорение свободного падения.
5. Баллистический коэффициент
 =
=  /
/  .
.
где  – площадь миделева сечения ракеты, проходящая по корпусу силового блока; =
– площадь миделева сечения ракеты, проходящая по корпусу силового блока; =  / – нагрузка на мидель; – максимальное значение коэффициента силы лобового сопротивления ракеты при нулевом угле атаки, числе
/ – нагрузка на мидель; – максимальное значение коэффициента силы лобового сопротивления ракеты при нулевом угле атаки, числе  и высоте
и высоте 
|
|
Для вторых ступеней РН имеем три независимых ПБП.
1. Относительная конечная масса второй ступени:
где  – конечная масса второй ступени;
– конечная масса второй ступени;  – стартовая масса второй ступени.
– стартовая масса второй ступени.
2. Удельный импульс тяги двигательной установки в пустоте:

где  – суммарная пустотная тяга двигательной установки второй ступени с учётом потерь характеристической скорости на управление;
– суммарная пустотная тяга двигательной установки второй ступени с учётом потерь характеристической скорости на управление;  – массовый секундный расхода топлива
– массовый секундный расхода топлива

3. Стартовую нагрузку на тягу или коэффициент тяговооруженности второй ступени:
В качестве ПБП будем также рассматривать характеристическую (идеальную) скорость соответственно для первой и верхних ступеней РН
 .
.
Аналогичные зависимости можно получить для любой ступени многоступенчатой ракеты.
Задачей баллистического анализа ракеты космического назначения является установление зависимостей, связывающих координаты точки старта с параметрами целевой орбиты (или траектории назначения) и проектно-баллистическими параметрами. Данные зависимости являются одним из граничных условий при решении более общей задачи – задачи баллистического проектирования.
В общем случае, когда выведение полезной нагрузки на целевую орбиту предполагается осуществлять путем формирования промежуточных орбит, задачу баллистического анализа можно представить в виде двух самостоятельных задач:
– анализа движения ракеты-носителя на участке прямого выведения орбитального блока на низкую опорную орбиту;
– анализа движения орбитального блока по промежуточным орбитам с выходом на целевую или траекторию назначения.
Первоначально остановимся на решении первой задачи.
Уравнения движения ракет-носителей на активном участке траектории
При выводе уравнений движения ракет-носителей используем следующие общепринятые допущения.
Земля – сферическая, поле ее тяготения – центральное.
Движение относительно центра масс ракеты не рассматривается.
Управление – идеальное, а управляющие усилия по сравнению с силой тяги – пренебрежимо малы. Ракета на активном участке траектории совершает строго программный полет.
Траектория движения ракеты при выведении полезной нагрузки на низкую базовую орбиту лежит в плоскости орбиты выведения, проходящей через центр Земли.
|
|
Влияние атмосферы на траекторию движения учитывается только на активном участке первой ступени.
При выводе уравнений движения суточное вращение Земли не рассматривается. Учет влияния окружной скорости Земли на траекторные переменные осуществляется введением поправок к интегралам уравнений движения в конце активного участка полёта ракеты-носителя.
При формировании системы уравнений движения воспользуемся следующими системами координат [1…5].
1) стартовой –с началом на поверхности Земли в точке старта ракеты-носителя; ось  , проходит через центр Земли
, проходит через центр Земли  и противоположна направлению силы тяжести; ось
и противоположна направлению силы тяжести; ось  лежит на пересечении плоскостей стартового горизонта и низкой опорной орбиты.
лежит на пересечении плоскостей стартового горизонта и низкой опорной орбиты.
2) сферической – с началом в центре Земли (точка F); линейная координата центра масс ракеты обозначается через  , а угловая, отсчитываемая от вертикали
, а угловая, отсчитываемая от вертикали  , – через
, – через  (рис. 1).
(рис. 1).
3) связанной –с началом в центре масс ракеты; ось  направлена по продольной оси ракеты, ось
направлена по продольной оси ракеты, ось  перпендикулярна ей и лежит в плоскости орбиты выведения (рис. 1).
перпендикулярна ей и лежит в плоскости орбиты выведения (рис. 1).
4) скоростной – начало системы совпадает с началом связанной системы координат; ось  направлена по вектору скорости, ось
направлена по вектору скорости, ось  перпендикулярна ей и лежит в плоскости траектории (рис. 1).
перпендикулярна ей и лежит в плоскости траектории (рис. 1).
В полёте на ракету действует следующая система сил:
– сила тяги двигательной установки  , вектор которой направлен по продольной оси ракеты;
, вектор которой направлен по продольной оси ракеты;
– сила тяжести  направленная к центру масс Земли, где
направленная к центру масс Земли, где  – текущая масса ракеты в рассматриваемый момент времени;
– текущая масса ракеты в рассматриваемый момент времени;  – ускорение свободного падения,
– ускорение свободного падения, 
 – константа поля тяготения Земли, принятая равной 398600 км3/c2);
– константа поля тяготения Земли, принятая равной 398600 км3/c2); 
 радиус-вектор;
радиус-вектор;
– сила аэродинамического сопротивления  , действующую в направлении, обратном направлению вектора скорости.
, действующую в направлении, обратном направлению вектора скорости.
Угловое положение ракеты характеризуется углом тангажа  , углом между линией стартового горизонта и осью ракеты. Угол тангажа также называют программным углом
, углом между линией стартового горизонта и осью ракеты. Угол тангажа также называют программным углом

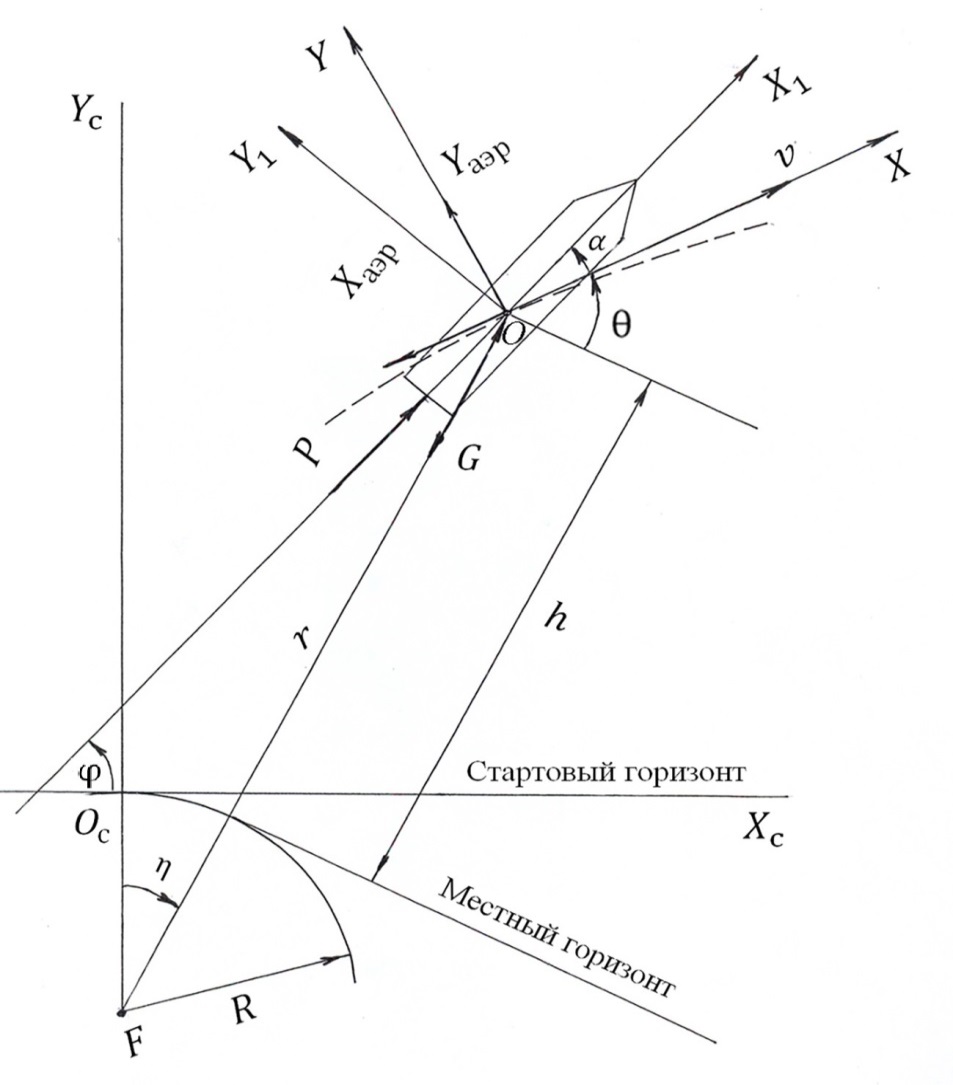
Рис. 1. Движение ракеты-носителя на активном участке траектории:
XcOcYc – стартовая система координат; XOY –скоростная система координат; X1OY1 – связанная система координат
|
|
Поскольку в общем случае продольная ось ракеты не совпадает с направлением вектора скорости, то справедливо соотношение

где  – угол наклона вектора скорости к местному горизонту;
– угол наклона вектора скорости к местному горизонту;  – угол атаки (угол между направлением вектора скорости и осью ракеты); – полярный угол (угол между стартовой вертикалью и направлением из центра Земли на центр масс ракеты); угол тангажа (угол между осью ракеты и стартовым горизонтом).
– угол атаки (угол между направлением вектора скорости и осью ракеты); – полярный угол (угол между стартовой вертикалью и направлением из центра Земли на центр масс ракеты); угол тангажа (угол между осью ракеты и стартовым горизонтом).
Если спроецировать все силы, действующие на ракету, на направление касательной к траектории и нормали к ней в скоростной системе координат, получим

 /
/  =
= 
где  – скорость полета ракеты, – мгновенный радиус кривизны траектории.
– скорость полета ракеты, – мгновенный радиус кривизны траектории.
Уравнение, необходимое для определения высоты полета  , получаем, спроецировав вектор скорости на направление текущего радиуса ,
, получаем, спроецировав вектор скорости на направление текущего радиуса ,

где  ;
;  – средний радиус Земли ( = 6371 км).
– средний радиус Земли ( = 6371 км).
Заданноое изменение угла тангажа  принимаем как программу полета. Программу выбирают из большого количества предъявляемых к ней требований, основным из которых является получение оптимальной траектории выведения, обеспечивающее экстремум критерия эффективности.
принимаем как программу полета. Программу выбирают из большого количества предъявляемых к ней требований, основным из которых является получение оптимальной траектории выведения, обеспечивающее экстремум критерия эффективности.
На рис. 2 приведена одна из возможных программ  , а также
, а также  и
и  для двухступенчатой ракеты-носителя (
для двухступенчатой ракеты-носителя ( – время активного участка первой ступени;
– время активного участка первой ступени;  – суммарное время активного участка траектории). Программа и траектория выведения условно разделены на ряд характерных участков в зависимости от условий полёта и требований, предъявляемых к программе.
– суммарное время активного участка траектории). Программа и траектория выведения условно разделены на ряд характерных участков в зависимости от условий полёта и требований, предъявляемых к программе.
I – участок вертикального полета. На этом участке ракета уходит от стартового стола и разворачивается по углу крена таким образом, чтобы плоскости стабилизации ракеты I и III совпадали бы с азимутом пуска. Его продолжительность около 7...13 с, что соответствует высоте вертикального участка h = 100…250 м, которая обычно задаётся из условий безопасности эксплуатации наземных сооружений стартового комплекса. В проектных расчётах для определения вертикального участка можно использовать зависимость [1]
 = 0,05
= 0,05  / (
/ ( ·
· 
II – участок разворота, где ракета летит с отрицательными углами атаки. Их абсолютное значение, как правило, не превышает  .
.
III – участок прохождения скорости звука и максимума скоростных напоров.
IV – участок гравитационного разворота, когда искривление траектории происходит в основном за счёт сил гравитации.
V – участок полёта второй ступени. На этом участке, после разделения ступеней, углы атаки, как правило, начинают монотонно возрастют (их абсолютное значение может достигать 20°). Напомним, что движение ракеты, начиная с этапа полёта второй ступени осуществляется практически в безвоздушном пространстве. Для двухступенчатой РН приблизительно половину продолжительности активного участка второй ступени ракета движется с углами атаки, близкими к максимальному значению, а затем углы атаки уменьшаются и могут принимать отрицательные величины. Для второй ступени трёхступенчатой ракеты-носителя максимальное значение угла атаки сохраняется практически до конца активного участка траектории (АУТ) второй ступени.
|
|
Рис. 2. Программа изменения углов тангажа, наклона траектории и угла атаки на участке выведения для двухступенчатой ракеты-носителя. Римскими цифрами обозначены характерные участки траектории
VI – участок наведения, где обеспечиваются расчетные значения траекторных переменных, соответствующих концу АУТ двухступенчатой РН. На этом участке тяга двигательной установки уменьшается либо за счет дросселирования маршевого ЖРД, либо за счет его полного отключения с переходом на тягу рулевых двигателей.
Теперь постараемся объяснить причину появления положительных углов атаки при движении верхних ступеней ракет-носителей. Будем считать, что выведение на низкую опорную орбиту является лишь этапом доставки полезного груза на целевую орбиту или отлётную траекторию. Как известно, программа движения ракеты выбирается из условия получения оптимальной траектории, обеспечивающей требуемые параметры орбиты при экстремальном значении критерия эффективности. Напомним, что минимум потерь характеристической скорости имеет место тогда, когда тяга двигательной установки на активном учасстке полёта направлена по касательной к траектории (движение с нулевыми углами атаки), а ее искривление достигается только за счет нормальной к траектории проекции гравитационных сил. Такой закон управления возможен. Он называется гравитационным разворотом. На первый взгляд может показаться, что данный закон является оптимальным для любого случая полёта, включая внеатмосферный участок траектории. Тем не менее, гравитационный закон управления является строго оптимальным лишь в том случае, если при выборе программы полета не учитывается влияние стартовой нагрузки на тягу верхеней  ступени
ступени  на массовые и стоимостные характеристики ракеты. При гравитационном развороте значения параметров
на массовые и стоимостные характеристики ракеты. При гравитационном развороте значения параметров  многоступенчатого носителя, обеспечивающие движение ракеты с нулевыми углами атаки, оказываются явно заниженными, а габариты и масса двигательной установки неоправданно велики в сравнении с соответствующими значениями, полученными из условия экстремума более комплексного критерия эффективности, например, удельной стоимости пуска.
многоступенчатого носителя, обеспечивающие движение ракеты с нулевыми углами атаки, оказываются явно заниженными, а габариты и масса двигательной установки неоправданно велики в сравнении с соответствующими значениями, полученными из условия экстремума более комплексного критерия эффективности, например, удельной стоимости пуска.
Как показывает опыт при выведении полезных нагрузок на целевые орбиты основная масса грузопотока проходит через низкую опорную орбиту. Высота опорной орбиты в первом приближении равна 180… 200 км. Оптимальное значение параметра  двухступенчатой РН из условия минимума стоимости пуска равно 1,15...1,5. Это больше соответствующего значения гравитационного разворота.
двухступенчатой РН из условия минимума стоимости пуска равно 1,15...1,5. Это больше соответствующего значения гравитационного разворота.
Теперь проведём анализ влияния параметра на критерий эффективности в окрестности значений, соответствующих движению с нулевами углами атаки. При увеличении параметра  снижаются масса и стоимость двигательной установки при одновременном увеличении времени полета, которое приводит к движению по более настильной траектории (рис. 3) в сравнении с траекторией гравитационного разворота.
снижаются масса и стоимость двигательной установки при одновременном увеличении времени полета, которое приводит к движению по более настильной траектории (рис. 3) в сравнении с траекторией гравитационного разворота.

Рис. 3. Выбор оптимальной программы полета и оптимального значения стартовой нагрузки на тягу второй ступени двухступенчатой ракеты-носителя:
 – значение коэффициента тяговооруженности, обеспечивающее движение по траектории гравитационного разворота;
– значение коэффициента тяговооруженности, обеспечивающее движение по траектории гравитационного разворота;
 – оптимальное значение коэффициента тяговооруженности из условия минимума стоимости.
– оптимальное значение коэффициента тяговооруженности из условия минимума стоимости.
При этом выведение на низкую опорную орбиту может быть обеспечено только благодаря дополнительной, нормальной к траектории, составляющей силы тяги, направленной вверх за счет положительного угла атаки. При дальнейшем увеличении параметра до определённого значения, равного  , снижение массы и стоимости ДУ оказывается превалирующим во влиянии на критерий эффективности в сравнении с потерями характеристической скорости на углы атаки. При
, снижение массы и стоимости ДУ оказывается превалирующим во влиянии на критерий эффективности в сравнении с потерями характеристической скорости на углы атаки. При  потери скорости, несмотря на снижение массы и стоимости ДУ, теперь уже приводят к увеличению удельной стоимости пуска за счёт увеличения потерь характеристической скорости. Отметим, что для трёхступенчатой ракеты наибольшие положительные углы атаки имеет место на участке полёта вторых ступеней.
потери скорости, несмотря на снижение массы и стоимости ДУ, теперь уже приводят к увеличению удельной стоимости пуска за счёт увеличения потерь характеристической скорости. Отметим, что для трёхступенчатой ракеты наибольшие положительные углы атаки имеет место на участке полёта вторых ступеней.
Методы определения скорости и высоты полёта в конце активного участка первых ступеней ракет-носителей
Проектирование новых образцов ракет-носителей представляет собой длительный многоэтапный итерационный процесс. В связи с этим на начальном этапе разработок возникает потребность в универсальных проектировочных методиках баллистических расчетов, определяющих допустимые границы значений основных проектных параметров ракеты и обеспечивающих выбор их оптимальных сочетаний с учетом требований Технического задания. Эти параметры в дальнейшем используются в качестве граничных условий при решении частных задач баллистического проектирования.
Ниже предлагается методика проектировочного баллистического расчета первых ступеней ракет-носителей, предназначенных для доставки полезной нагрузки на базовую околоземную орбиту. Расчетные зависимости представлены в аналитической форме. Как уже говорилось, применение высокоточных численных методов, с использованием численного интегрирование уравнений движения, на данном этапе разработок малоэффективно. Таким образом, методика проектировочного баллистического расчета должна быстро, не прибегая к громоздким вычислениям и численному интегрированию, определять траекторные переменные ракеты по её проектным параметрам. Одним из необходимых условий при разработке подобных методик является представление окончательных расчетных зависимостей в аналитической форме, т.к. использование аналитических соотношений позволяет на несколько порядков сократить время решения краевых задач [1, 2, 5]. Кроме того, аналитические методы весьма наглядны, что особенно ценно с точки зрения педагогического процесса.
Говоря о преимуществах приближенных аналитических методов, автор ни в коей мере не умаляется роль баллистических расчетов с использованием программных средств и алгоритмических языков высокого уровня. Напротив, результаты баллистических расчетов, полученных методом численного интегрирования уравнений движения, использовались в работе при построении аналитических соотношений.
Проведем анализ составляющих, входящих в систему уравнений движения и представим их в функции ПБП. Ввиду специфики условий полета, которые отличаются для первой и последующих ступеней, анализ системы уравнений будем проводить отдельно, соответственно для первой ступени и для верхних ступеней ракет-носителей. Первоначально остановимся на анализе составляющих системы уравнений движения активного участка первой ступени (атмосферного участке траектории).
1. Сила тяги

где  – суммарная тяга ДУ в пустоте;
– суммарная тяга ДУ в пустоте;  – суммарная тяга ДУ у поверхности Земли;
– суммарная тяга ДУ у поверхности Земли;  – атмосферное давление на высоте ;
– атмосферное давление на высоте ;  – атмосферное давление у поверхности Земли.
– атмосферное давление у поверхности Земли.
В полете за счет управления вектором тяги суммарная тяга уменьшается. Это уменьшение незначительно. Оно, как правило, для первых ступеней не более 0,3%, но его желательно учитывать либо введением так называемой эффективной суммарной тяги  , либо введением дополнительных потерь на органы управления
, либо введением дополнительных потерь на органы управления  . В дальнейшем под тягой
. В дальнейшем под тягой  будем понимать так называемую эффективную тягу
будем понимать так называемую эффективную тягу  суммарную тягу двигательной установки с учётом потерь на органы управления.
суммарную тягу двигательной установки с учётом потерь на органы управления.
Суммарную пустотную тягу можно представить как

где  – постоянный секундный массовый расход рабочего тела:
– постоянный секундный массовый расход рабочего тела:

Теперь выразим тягу в функции параметра 

2. Время полета определяем из дифференциального уравнения


где – время активного участка первой ступени. Напомним, что это выражение получено в предположении, что массовый секундный расход постоянен. Обычно на этапах проектной баллистики такое допущение вполне справедливо.
3. Сила лобового сопротивления

где  – аэродинамический коэффициент силы лобового сопротивления;
– аэродинамический коэффициент силы лобового сопротивления;  – плотность воздуха, которая является функцией высоты полета .
– плотность воздуха, которая является функцией высоты полета .
Типовая зависимость от  представлена на рис. 4, где
представлена на рис. 4, где  – число Маха. На рис. 5 приведены зависимости и
– число Маха. На рис. 5 приведены зависимости и  от времени полета.
от времени полета.
Рис. 4. Зависимость  от числа М.
от числа М.
Рис. 5. Изменение  и
и  активном участке траектории.
активном участке траектории.
Характерным является то, что при прохождении плотных слоёв атмосферы первоначально имеет максимум коэффициента , далее силы лобового сопротивления, а затем максимум скоростного напора. При решении задач проектной баллистики аэродинамический коэффициент силы лобового сопротивления удобно представить в следующем виде
=  .
.
В табл. 1 представлена универсальная зависимость  = (М), построенная в результате обработки результатов аэродинамических расчётов конкретных ракет-носителей, таких как: «Протон-К», «Протон-М», «Рокот», Ангара А-1.2, Ангара А5 с различными головными обтекателями.
= (М), построенная в результате обработки результатов аэродинамических расчётов конкретных ракет-носителей, таких как: «Протон-К», «Протон-М», «Рокот», Ангара А-1.2, Ангара А5 с различными головными обтекателями.
Таблица 1.
Универсальная зависимость  в функции числа Маха
в функции числа Маха
| M | 0,3 | 0,8 | 1,0 | 1,07 | 1,2 | 2,0 | 3,0 | 5,0 | 10 |
|
| 0,47 | 0,62 | 0,92 | 1,0 | 0,96 | 0,65 | 0,5 | 0,35 | 0,34 |
При интегрировании системы уравнений движения вводим дополнительное допущение: пренебрегаем влиянием подъёмной силы  на траекторные переменные. При этом, исключая подъёмную силу, мы не теряем требуемую точность вычислений, поскольку влияние
на траекторные переменные. При этом, исключая подъёмную силу, мы не теряем требуемую точность вычислений, поскольку влияние  на траекторию всегда можно компенсировать эффективным углом атаки
на траекторию всегда можно компенсировать эффективным углом атаки  , который входит в программу управления. При интегрировании системы дифференциальных уравнений движения численным методом в качестве программы предлагается закон измениния программного угла атаки, предложенный в работах [2, 4, 6]:
, который входит в программу управления. При интегрировании системы дифференциальных уравнений движения численным методом в качестве программы предлагается закон измениния программного угла атаки, предложенный в работах [2, 4, 6]:
где  – максимальное значение угла атаки,
– максимальное значение угла атаки,  ,
,  – число Маха, соответствующее моменту времени , где Для определения предлагаем использовать универсальное соотношение, полученное из условия
– число Маха, соответствующее моменту времени , где Для определения предлагаем использовать универсальное соотношение, полученное из условия  = 0.95 [1].
= 0.95 [1].
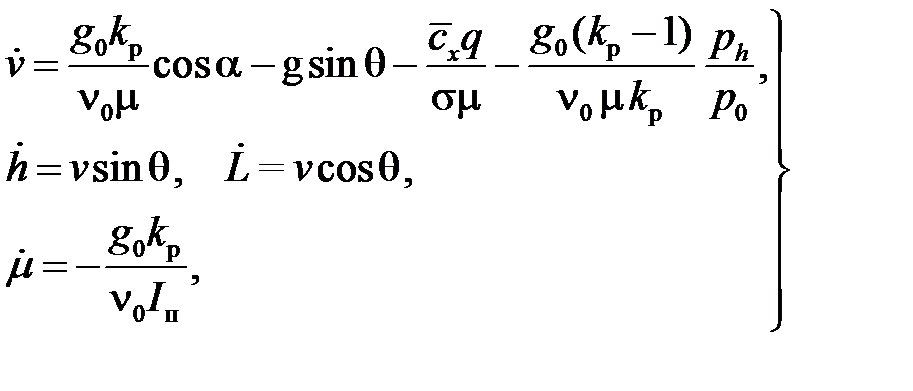
Теперь, выразив правые части системы уравнений движения через проектно-баллистические параметры, получаем дифференциальные уравнения движения, удобные для для интегрирования при проведении проектировочных баллистических расчётов
 (1)
(1)
где 
Система уравнений движения может быть решена методом численного интегрирования. При этом, как правило, отдельно интегрируются гравитационные и аэродинамические потери, а также потери на противодавление, а запас характеристической скорости определяется аналитически. Такой подход позволяет использовать более простые и менее затратные методы. Предложенная методика баллистического расчёта обычно используется в проектных отделах конструкторских бюро на ранних этапах разработок.
В зависимости от заданных требований при проведении проектировочных баллистических расчётов могут встречаться самые разнообразные задачи. Среди них наиболее часто встречаются задачи, связанные с выбором наиболее рационального сочетания проектных параметров и характеристик ракеты. Решение подобных задач связано с анализом влияния различных факторов на её лётно-технические характеристики. Подобный анализ подразумевает проведение колоссального объёма преварительных баллистических расчётов. Таким образом, в арсенале проектировщика должны быть не только математические модели и программы, опирающиеся на численное интегрирование систем дифференциальных уравнений движения, но также расчётные приближенные методики, позволяющие, не прибегая к громоздким вычислениям и численному интегрированию, быстро определять лётные характеристики ракеты по её конструктивным параметрам, решая задачу анализа. А также, обратно, по заданным лётно-техническим характеристикам рассчитывать конструктивные параметры ракеты [1, 2], решая задачу синтеза. Эта методика должна также позволять оценивать влияние изменения проектных параметров на лётно-технические характеристики с тем, чтобы иметь возможность выбрать их наивыгоднейшее сочетание.
Анализ характера изменения траекторных переменных атмосферного участка траектории позволил выявить две общие закономерности, которые в дальнейшем были реализованы при формировании расчетных аналитических формул.
Во-первых, движение первых ступеней носителей на атмосферном участке траектории, независимо от их класса, конструктивно-компоновочных схем и проектно-баллистических параметров, осуществляется с вертикальным ускорением  близким к постоянной величине. Этому есть объяснение. В полёте вертикальное ускорение изменяется обратно пропорционально относительной массе µ и прямо пропорционально синусу угла θ. При этом значения
близким к постоянной величине. Этому есть объяснение. В полёте вертикальное ускорение изменяется обратно пропорционально относительной массе µ и прямо пропорционально синусу угла θ. При этом значения  , также как и µ, уменьшается от единицы до величины
, также как и µ, уменьшается от единицы до величины  , близкой по значению параметру µк. Таким образом значение ускорения
, близкой по значению параметру µк. Таким образом значение ускорения  в полёте колеблется относительно некоторого осреднённого значения.
в полёте колеблется относительно некоторого осреднённого значения.
Во-вторых, максимум скоростного напора  имеет место приблизительно на одной и той же высоте
имеет место приблизительно на одной и той же высоте  м, независимо от ПБП, граничных условий и программы полёта.
м, независимо от ПБП, граничных условий и программы полёта.
На рис. 6 приведены типовые зависимости  и
и  , а на рис. 7 ускорения от времени полёта, а также потери характеристической скорости, о которых более подробно поговорим позже.
, а на рис. 7 ускорения от времени полёта, а также потери характеристической скорости, о которых более подробно поговорим позже.
Рис. 6. Закон изменения угла атаки, угла наклона вектора скорости
к местному горизонту и скоростного напора на АУТ первой ступени РН.
Рис. 7. Изменение вертикального ускорения центра масс ракеты и потерь
характеристической скорости на активном участке траектории первой ступени ракеты-носителя
Анализ результатов баллистических расчётов, проведённых методом численного интегрирования, позволил построить структуру универсальной формулы осреднённого вертикального ускорения на временном интервале от момента старта до момента максимума скоростного напора  :
:
 .
.
На рис. 8. показан характер изменения  для РН с различными топливными парами, углом
для РН с различными топливными парами, углом  и
и  . На рис. 9 показан характер изменения для ракет с параметрами
. На рис. 9 показан характер изменения для ракет с параметрами  , равными соответственно: 0,65, 0,7, 0,75 и топливом кислород+керосин (
, равными соответственно: 0,65, 0,7, 0,75 и топливом кислород+керосин ( м/с). Значения углов
м/с). Значения углов  были выбраны из условия построения близкой к оптимальной траектории выведения.
были выбраны из условия построения близкой к оптимальной траектории выведения.

Рис. 8. Зависимость скоростного напора от высоты полёта первых ступеней РН
с различными топливными парами при фиксированных значениях
параметра и угла  .
.

Рис. 9. Зависимость скоростного напора от высоты полёта первых ступеней РН
топливом «кислород+ керосин» при различных значениях параметра и угла
1 — = 0,65, = 50,5°; 2 — = 0,7, = 52,0°; 3 — = 0,75, = 53,5°
Момент времени  и параметр
и параметр  , соответствующие максимальному скоростному напору, согласно гипотезе движения с постоянным вертикальным ускорением, можно представить в следующем виде
, соответствующие максимальному скоростному напору, согласно гипотезе движения с постоянным вертикальным ускорением, можно представить в следующем виде
 .
.
При построении расчётных зависимостей приближенной методики баллистического расчета первых ступеней удобно вместо программы  использовать более упрощённую
использовать более упрощённую  . Тогда система уравнений движения запишется как
. Тогда система уравнений движения запишется как
 ,
,
где 
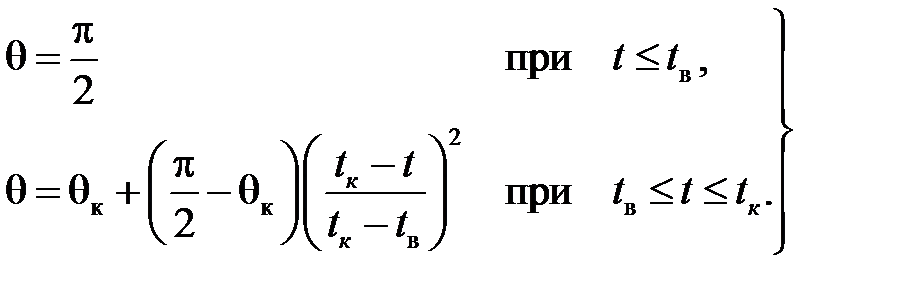
В работах [1] применительно к первым ступеням ракет рекомендуется использовать в качестве управляющей функции зависимость  в виде квадратичной параболы
в виде квадратичной параболы
 .
.
Однако, как показал анализ результатов баллистических расчётов, проведённых методом численного интегрирования, характер изменения  применительно к первым ступеням ракет-носителей отличается от параболического. В частности угол
применительно к первым ступеням ракет-носителей отличается от параболического. В частности угол  не выдерживается постоянным в конце активного участка первой ступени, а непрерывно убывает вплоть до момента разделения ступеней. Вследствие этого, использование квадратичной аппроксимации в качестве управляющей функции приводит к заниженному значению гравитационных потерь (до 15%). Кроме того, параболический закон управления не учитывает влияния параметров
не выдерживается постоянным в конце активного участка первой ступени, а непрерывно убывает вплоть до момента разделения ступеней. Вследствие этого, использование квадратичной аппроксимации в качестве управляющей функции приводит к заниженному значению гравитационных потерь (до 15%). Кроме того, параболический закон управления не учитывает влияния параметров

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!