При проектировании механизма положение оси вращения кулачка выбирают таким образом, чтобы любое из текущих значений угла давления  не превышало заданного допустимого значения
не превышало заданного допустимого значения  ,
,  . Для этого строят фазовый портрет, т.е. зависимость
. Для этого строят фазовый портрет, т.е. зависимость  и в каждой i -й позиции через конец отрезка кинематической передаточной функции скорости
и в каждой i -й позиции через конец отрезка кинематической передаточной функции скорости  луч под углом к перпендикуляру вектора скорости в этой точке.
луч под углом к перпендикуляру вектора скорости в этой точке.
Мы получаем  , из ряда нормальных размеров выбираем ближайшее наибольшее значение
, из ряда нормальных размеров выбираем ближайшее наибольшее значение 

Рис. 10 Диаграмма кинематических отношений кулачкового механизма.
Отсюда мы определяем r0, но так получилось значение, не входящее в ряд нормальных размеров, мы берем ближайшее большее значение r0 (берем большее, потому что должно входить в ОДР)Р
6.4. Определение формы профиля кулачка
Для построения профиля кулачка применяем метод обращения движения: всем звеньям механизма условно сообщаем угловую скорость, равную -w. При этом кулачок остается неподвижным, а остальные звенья вращаются с угловой скоростью, равной по величине, но противоположной по направлению угловой скорости кулачка.
Принимаем масштаб построения ml = 6000 мм/м. Строим окружность радиусом r0 = 45, который равен расстоянию от точки O1, точки пересечения лучей, до точек B0, B13 на фазовом портрете. Угол рабочего профиля кулачка (110°) разбиваем на 13 частей по 8.5°. Фиксируем точки пересечения лучей проведенных через 8.5° из точки O1 и окружности радиусом r0. Вдоль лучей от точек пересечения откладываем отрезки, соответствующие перемещениям толкателя в соответствующем масштабе. Соединяя полученные точки плавной кривой, получаем теоретический профиль кулачка.
Для получения рабочего профиля кулачка строим эквидистантный профиль, отстоящий от теоретического на величину радиуса ролика.
Для этого из концов отложенных отрезков перемещений проводим дуги окружностей радиусом ролика. Радиус ролика выбирают из ряда стандартных размеров и по соотношению

Принимаем 

График угла давления
Для проверки условия отсутствия заклинивания в каждом положении механизма строится график изменения угла давления от угла поворота кулачка.
Построение графика производится для фазы удаления ( ) толкателя, так как только для этой фазы существует угол давления, и только на фазе удаления, данный кулачковый механизм может заклинить.
) толкателя, так как только для этой фазы существует угол давления, и только на фазе удаления, данный кулачковый механизм может заклинить.
Однако, т.к. кулачок реверсивный, то фаза удаления при одном направлении вращения кулачка становится фазой сближения при его обратном направлении вращения. Соответственно, при обратном направлении вращения фазой удаления будет фаза сближения прямого направления. Поэтому для обратного направления вращения следует строить свой график углов давления, ограничиваясь только фазой удаления обратного направления вращения.
Как видно из графика при любом положении кулачка, текущий угол давления меньше или равен максимально допустимому углу давления  , следовательно, заклинивания не произойдёт.
, следовательно, заклинивания не произойдёт.
7.Дополнительное задание
Как изменится динамика машины, если выйдет из строя один из цилиндров?
Все результаты приведены в Приложении 6.
Заключение
В ходе выполнения курсового проекта получены следующие результаты:
1. Спроектирована кинематическая схема и определены длины звеньев механизма:
 ; определены угловая скорость, закон движения
; определены угловая скорость, закон движения 

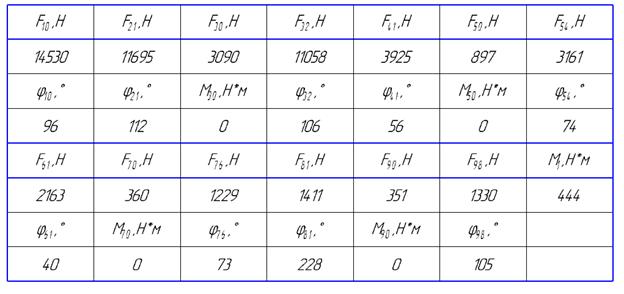
2. Определены силовые воздействия на звенья механизм, рассчитаны усилия в кинематических парах.
Результаты силового расчета (силы в Н, момент в Н*м) представлен в таблице:
3. Спроектирована эвольвентная зубчатая передача:  с числом зубьев колес z1=16 и z2=23, модулем m=4.5 мм, коэффициентами смещения х1=0.4 и х2=-0.11.
с числом зубьев колес z1=16 и z2=23, модулем m=4.5 мм, коэффициентами смещения х1=0.4 и х2=-0.11.
Спроектирован однорядный планетарный редуктор с передаточным отношением  с числами зубьев колес z5 =19, z6 =47, z7 =113.
с числами зубьев колес z5 =19, z6 =47, z7 =113.
4.
5. Спроектирован кулачковый механизм с поступательно движущимся роликовым толкателем. Определены основные размеры кулачка: радиус кулачка 
 эксцентриситет
эксцентриситет  радиус ролика
радиус ролика 
Список литературы
1. Теория механизмов и машин. Курсовое проектирование: учеб. пособие для вузов / Кузенков В.В., Самойлова М.В., Тарабарин В.Б. [и др.]; ред. Тимофеев Г.А., Умнов Н.В. - 2-е изд., перераб. и доп. - М.: Изд-во МГТУ им. Н. Э. Баумана, 2012. - 169 с.: ил. - Библиогр.: с. 167. - ISBN 978-5-7038-3569-2.
2. Попов С.А., Тимофеев Г.А. Курсовое проектирование по теории механизмов и механике машин: учеб. пособие для втузов / Попов С.А., Тимофеев Г.А.; ред. Фролов К.В. - 6-е изд., стер. - М.: Высш. шк., 2008. - 456 с.: ил. - ISBN 978-5-06-005952-6.






