В штормовых условиях сопротивление движению судна возрастает, вследствие движения ветра, волнения и течения. При этом потеря скорости является следствием совокупности следующих причин:
-увеличение воздушного сопротивления (до 10% и более общего, против 2-3% обычно);
-дополнительного сопротивления, обусловленного килевой и бортовой качкой;
-увеличение сопротивления вследствие движения судна с углом дрейфа под воздействием ветра и волнения;
-увеличение сопротивления за счет рыскливости судна (вследствие частых перекладок руля для удержания судна на заданном курсе, увеличивается тормозящее действие руля);
-понижения пропульсивных качеств системы корпус-движетель из-за килевой качки и работы ГВ в косом потоке.
Сопротивление движению судна на взволнованном море возрастает с увеличением высоты волны и коэффициента полноты корпуса и имеет относительно большее значение при малых скоростях хода.

Рис. 12 Зависимости температур выпускных газов ( ) и стенки цилиндра (
) и стенки цилиндра ( ) от частоты вращения.
) от частоты вращения.

Рис. 13 Поля устойчивой и допустимий работы СДВС: 1 - линия  ; 2 - ограничительная характеристика
; 2 - ограничительная характеристика  ; 3 – номинальная внешняя характеристика: 4 –ограничительная по теплонапряженности; 5 – ограничительная регуляторная характеристика; 6 – нижняя внешняя характеристика холостого хода.
; 3 – номинальная внешняя характеристика: 4 –ограничительная по теплонапряженности; 5 – ограничительная регуляторная характеристика; 6 – нижняя внешняя характеристика холостого хода.
В балласте потеря скорости значительнее, чем в грузе. Наибольшее влияние волнения имеет место при отношениях длины поперечной волны к длине судна  ÷1,2. Вышеуказанные факторы приводят к возрастанию момента и упора на ГВ, кН·м, кН,
÷1,2. Вышеуказанные факторы приводят к возрастанию момента и упора на ГВ, кН·м, кН,



Изменение нагрузки на двигатель при плавании в штормовых условиях иллюстрируется графиками, приведенными на рис. 14 и построенными применительно к двум случаям регулирования: ручному с сохранением постоянной цикловой подачи топлива и автоматическому с помощью всережимного регулятора.
Графики построены в предположении, что двигатель работает по некоторой утяжеленной винтовой характеристике  ; винтовая характеристика
; винтовая характеристика  оценивает изменение нагрузки при всходе судна на волну, а характеристика
оценивает изменение нагрузки при всходе судна на волну, а характеристика  при сходе с волны. В первом случае при всходе на волну нагрузка на ГД будет изменятся по участку частичной внешней характеристики 5-1-4, а при сходе – по участку 4-1-5. При автоматическом регулировании нагрузка изменяется по регуляторной характеристике
при сходе с волны. В первом случае при всходе на волну нагрузка на ГД будет изменятся по участку частичной внешней характеристики 5-1-4, а при сходе – по участку 4-1-5. При автоматическом регулировании нагрузка изменяется по регуляторной характеристике  ; участок 3-1-2 соответствует всходу на волну, а 2-1-3 – сходу с волны. Сопоставляя характеристики, видим, что при ручном регулировании имеет место значительное колебание частоты вращения, а нагрузка на двигатель изменяется мало. При автоматическом регулировании, напротив, обеспечивается незначительное изменение частоты вращения при весьма широких колебаниях нагрузки, вплоть до внешней характеристики.
; участок 3-1-2 соответствует всходу на волну, а 2-1-3 – сходу с волны. Сопоставляя характеристики, видим, что при ручном регулировании имеет место значительное колебание частоты вращения, а нагрузка на двигатель изменяется мало. При автоматическом регулировании, напротив, обеспечивается незначительное изменение частоты вращения при весьма широких колебаниях нагрузки, вплоть до внешней характеристики.
Таким образом, при ручном регулировании может возникнуть опасность разноса двигателя (например, при оголении винта) либо двигатель может заглохнуть (если судно движется с малой скоростью и частота вращения не превышает 0,4  ).
).
Всережимный регулятор обеспечивает незначительные колебания частоты вращения, однако существенные изменения нагрузки пагубно сказываются на надежности и долговечности двигателя.
По опытным данным, утяжеления винтовой характеристики и увеличения нагрузки на двигатель при состоянии моря 4-5 баллов достигает 1,13-1,16 (при n=const) по сравнению с условиями плавания в штилевую погоду. Пределы колебания нагрузки при всходе на волну и сходе с волны составляют 1,25-0,90. Таким образом, при плавании в штормовую погоду во избежании перегрузки ГД (при сохранении ) скорость хода должна быть снижена до  . Кроме того, необходимость существенного снижения скорости судна на взволнованном море вызывается стремлением уменьшить ударные силы, действующие на корпус судна, т.е. уменьшить вероятность ударов носовой оконечности о воду ― слеминга.
. Кроме того, необходимость существенного снижения скорости судна на взволнованном море вызывается стремлением уменьшить ударные силы, действующие на корпус судна, т.е. уменьшить вероятность ударов носовой оконечности о воду ― слеминга.
В каждом случаи снижение мощности ГД зависит от скорости, размеров и коэффициента полноты корпуса судна, загрузки, периода килевой и бортовой качки и др.
При плавании в условиях переменного ветра и волнения возникает проблема рационального управления ГД и движением судна, которое, в сущности, сводится к решению двух задач:
-регулирование среднего уровня мощности ГД в зависимости от постепенно изменяющихся условий плавания;
-регулирование мгновенных значений мощности и частоты вращения ГД при быстрых изменениях нагрузки на винты происходящих от изменения крена и дифферента судна при ходке на волнении.

Рис. 14 Взаимодействие ГВ и ГД в штормовых условиях: I – номинальная внешняя характеристика; II – частичная внешняя характеристика.
В первом случае рациональное управление ГД (обеспечивающее допустимую нагрузку по среднему эффективному давлению  или вращающему моменту
или вращающему моменту  ) обеспечивается при условии, что за сет изменения мощности и частоты вращения ГД упор винта (или его тормозной момент) остается постоянным независимо от интенсивности волнения. При этом под словами «упор» и «момент» ГД подразумеваются значения упора и момента осредненные в интервале 1-2 мин.
) обеспечивается при условии, что за сет изменения мощности и частоты вращения ГД упор винта (или его тормозной момент) остается постоянным независимо от интенсивности волнения. При этом под словами «упор» и «момент» ГД подразумеваются значения упора и момента осредненные в интервале 1-2 мин.
Таким образом, поддержание постоянного упора или момента на ГВ не приходит в противоречие с требованиями безопасности плавания, согласно которым при сильном волнении следует снижать мощность ГД и скорость хода.
Что касается второй задачи, то ее решение сводится к следующему: управление ГД при быстрых изменениях нагрузки на ГВ заключается в поддержании постоянства скорости вращения гребного вала (винта).
Итак, при медленных изменениях погодных условий следует сохранить,  регулируя частоту вращения гребного вала (n = var), а при быстрых колебаниях нагрузки на ГВ от волны к волне необходимо регулировать уровень мощности ГД таким образом, чтобы поддерживать n = const (M е = var). Указанное различие в принципах рационального регулирования уровня мощности ГД в штормовых условиях обусловлено инерционностью корпуса судна: при медленных изменениях условий плавания, исчисляемых часами и сутками, инерция судна не мешает тому, чтобы его скорость следовала за изменением сопротивления движению; при быстрых же изменениях сопротивления от волны к волен, скорость движения центра тяжести судна не успевает существенно изменится и остается постоянной.
регулируя частоту вращения гребного вала (n = var), а при быстрых колебаниях нагрузки на ГВ от волны к волне необходимо регулировать уровень мощности ГД таким образом, чтобы поддерживать n = const (M е = var). Указанное различие в принципах рационального регулирования уровня мощности ГД в штормовых условиях обусловлено инерционностью корпуса судна: при медленных изменениях условий плавания, исчисляемых часами и сутками, инерция судна не мешает тому, чтобы его скорость следовала за изменением сопротивления движению; при быстрых же изменениях сопротивления от волны к волен, скорость движения центра тяжести судна не успевает существенно изменится и остается постоянной.
Для установок с ГТЗА проблема реализации управления мощностью на волнение не возникает: большая инерционность вращающих масс обеспечивает незначительные колебания частоты вращения ГВ т.е. необходимый в данном случае закон управления n = const осуществляется автоматически. Для установок с ДВС поддержание n = const осуществляется всережимным регулятором; при движении на волнении при условиях  = var, он обеспечивает меньший расход топлива, чем предельный. Всережимный регулятор обеспечивает не только регулирование мощности и частоты вращения при быстрых колебаниях нагрузки на ГВ от волны к волне, но и регулирование при медленных изменениях условий плавания. По сравнению с предельным при ходе на волнении он снижает колебание частоты вращения ГВ за счет увеличения колебаний в подаче топлива.
= var, он обеспечивает меньший расход топлива, чем предельный. Всережимный регулятор обеспечивает не только регулирование мощности и частоты вращения при быстрых колебаниях нагрузки на ГВ от волны к волне, но и регулирование при медленных изменениях условий плавания. По сравнению с предельным при ходе на волнении он снижает колебание частоты вращения ГВ за счет увеличения колебаний в подаче топлива.
Режимы буксировки воза
При наличии ВФШ часть потенциальной энергии ГД может быть использована для буксировки воза (толкание состава), если частота вращения при этом будет ниже номинальной.
Упор гребневого винта, как известно:
 (9),
(9),
а полезная тяга одновинтового судна определятся через упор с поправкой на коэффициент засасывания t;
 кН (10)
кН (10)
При свободном ходе (воз отсутствует) полезная тяга ГВ равна и противоположна силе сопротивления судна, т.е. Ре= R, а при его наличии Ре > R. В этом случаи тяга на гаке определяется разностью:  (11).
(11).
Графические зависимости сопротивления воды движению судна R = f 1 ( ) и полезной тяги Ре= f 2 () от скорости судна представлены на рис. 15.
) и полезной тяги Ре= f 2 () от скорости судна представлены на рис. 15.
Путем наложения кривых R = f 1 ( ) и Ре= f 2 () получают режимы совместной работы корпуса судна и ГВ. Кривые 1-5 показывают зависимости сопротивления судна от скорости хода при различных условиях плавания (1-в балласте, 2-в полном грузу при расчетных условиях работы, 3-при обросшем корпусе судна, 4-при буксировке одного воза, 5-при буксировке двух возов), а кривые 6-10 зависимости полезной тяги ГВ при различных, но постоянных частотах вращения гребного вала.
) и Ре= f 2 () получают режимы совместной работы корпуса судна и ГВ. Кривые 1-5 показывают зависимости сопротивления судна от скорости хода при различных условиях плавания (1-в балласте, 2-в полном грузу при расчетных условиях работы, 3-при обросшем корпусе судна, 4-при буксировке одного воза, 5-при буксировке двух возов), а кривые 6-10 зависимости полезной тяги ГВ при различных, но постоянных частотах вращения гребного вала.
 =
= 
 (12)
(12)
Тяга на гаке буксирующего судна возрастает с увеличением скорости, а при одной и той же скорости с увеличением количества возов.
Из рис. 16 видно, что при буксировке воза, для поддержания Ме= const необходимо снижать скорость движения судна, следовательно, и частоту вращения двигателя.
При ВРШ появляется возможность использования полной мощности двигателя при любом сопротивлении (скорости) судна, что особенно важно для судов, сопротивление которых изменяется в широких пределах (буксиры―траулеры, ледоколы). Таким судам присуще две характеристики режима работы―свободный ход и буксировка воза. При этом ВФШ, рассчитанный для режима свободного хода, оказывается тяжелым для хода с возом, а винт, спроектированный для режима воза―легким для свободного хода.
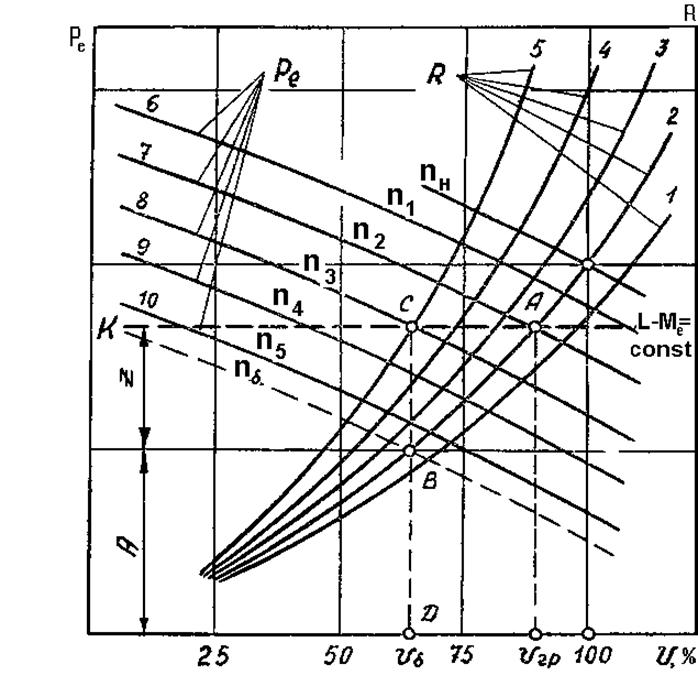
Рис. 15. К выбору режима движения при буксировке воза 1…5 – R = f (); 6…10 – R =  () при n = const; KL – ограничение по Ме.
() при n = const; KL – ограничение по Ме.
В первом случае не используется полная мощность двигателя при ходе с возом, во втором―при свободном ходе. Установка ВРШ на данных судах позволяет получить выигрыш в тяге на гаке либо в скорости свободного хода, что видно из рис. 17. Здесь кривая 1 относится к ВРШ, спроектированному на свободный ход, кривая–2 к ВРШ, предназначенному для буксировки воза, а кривая 3 к ВРШ.
Пример 2.
Судно, потерявшее способность двигаться самостоятельно, необходимо взять на буксир. Каковы должны быть мощности и частота вращения главного двигателя (МОД) буксирного судна, а также скорость хода каравана.
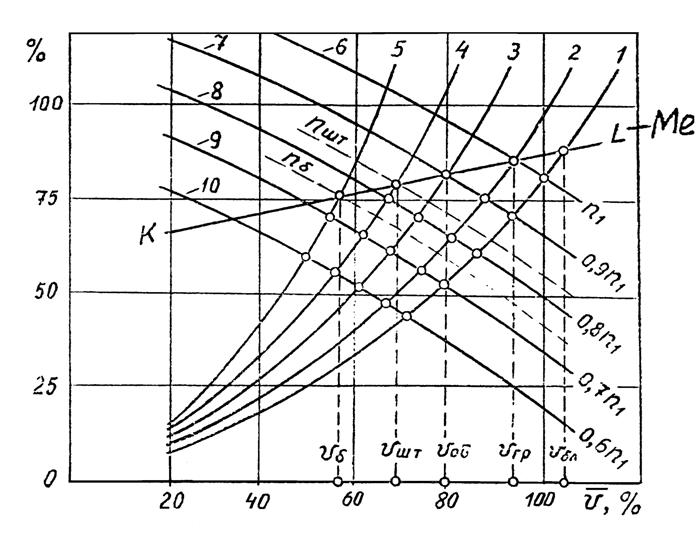
Рис. 16 Взаимодействие ГВ и ГД: 1…5 – зависимости; 2,3,4,5 – чистый т обросший корпус судна, работа в шторм, буксировка воза; 6..10 – кривые при
Промежуточные задачи
1. Определение относительной поступи ГВ, коэффициентов упора и момента.
2. Расчет полезной тяги ГВ и момента на винте.
3. Расчет скорости хода, мощности и частоты вращения ГД.
Исходные данные:
- эксплутационная мощность ГД N е =6500вВт;
- частота вращения гребного винта nн =120мин-1;
- скорость хода судна  узл;
узл;
- КПД валопровода  0,96;
0,96;
- плотность заборной воды  =1025кг/м3;
=1025кг/м3;
- коэффициент попутного потока  =0,28;
=0,28;
- коэффициент засасывания t =0,174;
- тяга на гаке Z =220кН;
- коэффициент воза =0.32.

Рис. 17 Зависимости тяги на Гане от скорости хода судна при ВФШ и: 1 – ВФШ для свободного хода; 2 – ВФШ для швартового режима; 3 – ВРШ.
Элементы гребного винта:
-диаметр Дв =5,3м;
-дисковое отношение  ;
;
-шаговое отношение Н/Д=0,94;
-число лопастей Z =4.
Решение:
1. Вначале определяется относительная поступь гребного винта при свободном ходе


Затем по кривым действия гребного винта за корпусом судна находим коэффициенты К1и К2.. В данном случае при  =0,635, К1=0,18, К2 =0,029.
=0,635, К1=0,18, К2 =0,029.
2. Полезная тяга винта кН

Момент на гребном винте; кН·м

.
При свободном ходе сопротивление среды движению судна равно полезной тяге, т.е.

При буксировке R б =Ре- Z =485-220=265кН
3. Учитывая, что R =  , из соотношения; получим скорость буксировки
, из соотношения; получим скорость буксировки

Мощность на гребневом винте при буксировке
Nвб=  ,
,
а эффективная мощность ГД соответственно

Учитывая то обстоятельство, что как при свободном ходе, так и при буксировке воза момент на ГВ, должен оставаться неизменным (во избежание механических перегрузок системы ГВ-ГД должно соблюдаться условие Мв= const) определяем частоту вращения ГВ при буксировке.

Швартовный режим работы ПУ
Режим работы пропульсивного комплекса судна при снятии с мели (швартовый режим) характерен тем, что относительная поступь винта  , а коэффициенты упора К1 и момента К2 имеют максимальное значение. Это означает, что при данном режиме возникает опасность механических (для всех типов двигателей) и тепловых (для дизелей) перегрузок. Следовательно, при снятии с мели, как и при других нерасчетных режимах необходимо, прежде всего, обеспечить допустимые значения нагрузочных параметров. К таким параметрам относятся мощность двигателя, вращающий момент, частота вращения вала и др.
, а коэффициенты упора К1 и момента К2 имеют максимальное значение. Это означает, что при данном режиме возникает опасность механических (для всех типов двигателей) и тепловых (для дизелей) перегрузок. Следовательно, при снятии с мели, как и при других нерасчетных режимах необходимо, прежде всего, обеспечить допустимые значения нагрузочных параметров. К таким параметрам относятся мощность двигателя, вращающий момент, частота вращения вала и др.
Пример 3
Определить допустимые параметры работы ГД (мощность и частота вращения) при снятии судна смели (при швартовом режиме).
Промежуточные задачи:
1. Определение относительной поступи гребного винта, коэффициентов упора и момента на винте на нормальном эксплутационном режимах.
2. Определение момента ГВ при нормальном и швартовном режимах.
3. Определение частоты вращения, упора ГВ и мощности ГД при швартовном режиме.
Исходные данные:
Длительная эксплуатационная мощность ГД N е =6500кВт
Частота вращения вала n н =120мин-1
Скорость хода судна узл
Параметры гребного винта:
-шаговое отношение Н/Д=0,94;
-дисковое отношение ;
-диаметр винта Д =5,3;
-число лопастей Z =4.
-коэффициент попутного потока =0,28
Решение:
1. В нормальных условиях эксплуатации  , а коэффициенты упора и момента (определяемые по кривым действия винта) К1=0,18; К2=0,029.
, а коэффициенты упора и момента (определяемые по кривым действия винта) К1=0,18; К2=0,029.
2. В данном случае упор и момент на винте равны:

 (12)
(12)
При снятии с мели момент равен:
 (13)
(13)
При этом полагаем, что  , определяем по кривым действия винта К1м=0,4, К2м=0,054. Учитывая, что
, определяем по кривым действия винта К1м=0,4, К2м=0,054. Учитывая, что  , после преобразований получим допустимое значение частоты вращения:
, после преобразований получим допустимое значение частоты вращения:  мин-1
мин-1
Зная момент и частоту вращения винта, определим допустимую мощность при снятии с мели

Таким образом, частота вращения и мощность ГД при соблюдении условий Мв= const составляет около 66% нормальных значений. Упор гребного винта при снятии с мели:
 относительная величина упора
относительная величина упора

5.6 Режим работы ГД при старте и разгоне судна
При страгивании и разгоне судна кроме сопротивления воды, необходимо преодолеть еще силу инерции массы судна. Поэтому упор и момент винта при этом будет больше, чем при установившемся движении с заданной скоростью.
В момент страгивания скорость судна равна нулю, следовательно, и  ; поэтому К2 стремится к максимальному значению т.к. ГД и ГВ судна работают с некоторой частотой вращения n стр . Момент
; поэтому К2 стремится к максимальному значению т.к. ГД и ГВ судна работают с некоторой частотой вращения n стр . Момент
 (13)
(13)
в случае высоких n стр,  может оказаться, как и при работе на швартовах, чрезмерно большим и двигатель будет перегружен. При разгоне судна, в зависимости от интенсивности нарастания частоты вращения, устанавливается и характер изменения момента на ГВ во времени. Уравнение движения судна в период разгона имеет вид:
может оказаться, как и при работе на швартовах, чрезмерно большим и двигатель будет перегружен. При разгоне судна, в зависимости от интенсивности нарастания частоты вращения, устанавливается и характер изменения момента на ГВ во времени. Уравнение движения судна в период разгона имеет вид:
 (14)
(14)
где Мс - масса судна, кг;
 - присоединенная масса воды, кг.
- присоединенная масса воды, кг.
При разгоне судна  , следовательно,
, следовательно,  >0.
>0.
Уравнение равенства моментов на ГВ имеет вид:  (15);
(15);
где Ме, Мв, Мтр - соответственно крутящий момент ГД, момент ГВ и момент трения в валопроводе, Н·м;
 приведенный к оси ГВ момент инерции вращения масс системы ГД – ГВ с учетом присоединенной массы воды Н·м·с2.
приведенный к оси ГВ момент инерции вращения масс системы ГД – ГВ с учетом присоединенной массы воды Н·м·с2.
Наибольшее влияние на величину оказывает момент, потребляемый ГВ Мв, а величина  имеет существенное значение на переходных режимах и в значительной мере определяет время разгона;
имеет существенное значение на переходных режимах и в значительной мере определяет время разгона;
 (16)
(16)
На рис.18 показана зависимость N е = f (n) при разгоне судна.
Наиболее опасным является начальный период работы после пуска, т. к. в начальный момент, примерно через 10с, в днище поршня возникает наибольшие напряжения (для МОД «Зульцер» около 45·106 Па). По мере прогревания стенки (примерно через 2мин) они достигают значения 107 Па и через 5мин практически стабилизируются. Обычно ввод в режим следует начинать с частоты вращения, соответствующей малому ходу судна с постепенным прибавлением топлива. Характер изменения частоты вращения при вводе двигателя, в режим, показан на рис. 19.

Рис. 18 Изменение нагрузки на ГД в период разгона судна: I-внешняя характеристика; II-винтовая характеристика; 1-2-3-4-5…14 – нормальный разгон; 1-2-3-4-15-14 – экстренный разгон.
Из этого графика видно, что в начале частота вращения увеличивается относительно быстро, а затем снижается. Так для МОД ДКРН 74/160-2БМ3, 74VТ, 2ВF-160B  W, RД 76 «Зульцер» общее время ввода двигателя в режим составляет не более 2-х часов, если ввод производится с малого хода и один час, если со среднего хода.
W, RД 76 «Зульцер» общее время ввода двигателя в режим составляет не более 2-х часов, если ввод производится с малого хода и один час, если со среднего хода.
В каждом конкретном случае время ввода в режим обуславливается инструкцией по эксплуатации и зависит главным образом от металлоемкости двигателя.
Если нет специальных рекомендаций завода-строителя, то согласно ПТЭ выводить двигатель на режим полного хода в порядке указанном в разделе 7.1 (стр.15-16) ПТЭ морских и речных судов, дизели КНД 31.002.03-96.
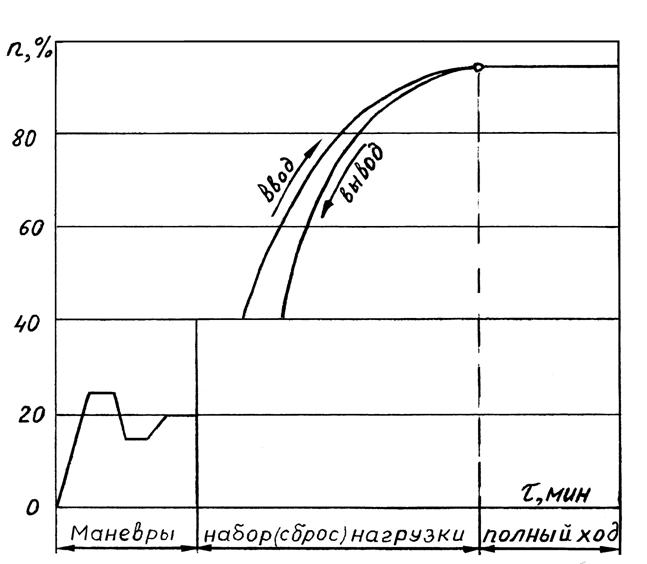
Рис. 19 График ввода и вывода ГД из действия.





