Рис. 2. 13.
1. Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор.
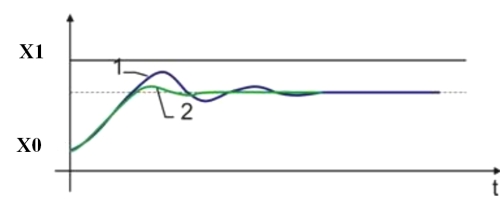
2. Предположим, что на этапе 1 настроена пропорциональная часть, соответствующая переходной характеристике типа 1 показанной на рис. 2.13, в которой присутствуют затухающие колебания. В этом случае следует так настроить дифференциальную часть, чтобы переходная характеристика имела вид кривой 2 на рис. 2.13. А если пропорциональная часть настроена как на характеристике типа 2, следует так настроить дифференциальную часть, чтобы переходная характеристика имела вид кривой 3. И так далее.
3. Мы настраиваем нашу систему по второму варианту, из-за требований по перерегулированию. На этом этапе начинаем учет не только значений входной переменной errs, но и znu – знака производной от ошибки errs. znu помогает нам учесть динамику ошибки, растет она, уменьшается или неизменна и дает возможность лучше настроить систему.
4. В нашем случае входная переменная znu имеет 3 функции принадлежности, поэтому для ее учета в общем случае требуется 5*3=15 правил (5- число функций пренадлежности входной переменной errs; а 3, соответственно, znu). Иногда число правил может быть уменьшено из-за того что нет необходимости учитывать некоторые комбинации функций принадлежности входных переменных.
5. Настройку пропорциональной составляющей необходимо производить так, чтобы при больших ошибках она была минимальна и не мешала системе быстро реагировать на изменение, а при малых ошибках наоборот, гасила колебания, т.е. была существенной и приводили переходной процесс к необходимому нам виду.
Вывод: Дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику более оптимальной. Это значит, что динамическая точность регулирования при наличии дифференциальной компоненты (ПД -регулятор) может быть выше, чем для П -регулятора.
Настраиваем систему под 4 тип как на рисунке 2.12. Все полученные настройки приведены в графической части.
Этап 3. Настройка интегральной части Ki
После настройки пропорциональной и, при необходимости и дифференциальной компоненты, получается переходная характеристика 1, показанная на рис. 2.10.
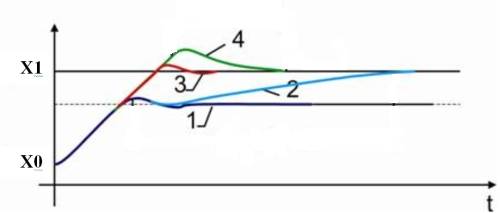
Рис. 2.14
Возможные варианты кривых приведены на рис. 2.14.
Переходная характеристика 2
Такая кривая получается при чрезмерно большой величине интегральной части. Выход на уставку оказывается затянутым. В этом случае рекомендуется уменьшить влияние интегральной части при малых ошибках. С помощью изменения ее функций принадлежности или правил.
Переходная характеристика 4
Получается при слишком малой величине интегральной части. Выход на уставку также длится долго. Если интегральной части уменьшить еще, то в системе могут возникнуть колебания. Следует увеличить значение интегральной части методами, противоположными методам в случае переходной характеристики №2.
Переходная характеристика 3
Значение интегральной части выбрано оптимально.
Вывод: Интегральная компонента позволяет минимизировать остаточное рассогласование между установившимся в системе значением регулируемого параметра и уставкой.

Рис. 2.15.
График переходного процесса системы с нечетким ПИД регулятором в тяжелом режиме, соответствующем максимальному углу переброски показан на Рис 2.15.
Переходный процесс исходной и полученной системы представлены на рис. 2.8 и 2.15 соответственно. По графику на рис. 2.15 оценим параметры полученного переходного процесса:
Перерегулирование:
Величина перерегулирования для САУ с регулятором составляет:

Эта величина больше перерегулирования для системы без регулятора. Это обусловлено тем, что регулятор изначально проектировался для уменьшения времени переходного процесса системы. Как видно из сравнения этих величин – результат достигнут.
Время переходного процесса:
Из оценки графика на рис. 11 видно, что время переходного процесса уменьшилось и составляет величину:

Уменьшение этой величины являлось основной задачей использования ПИД контроллера.
Нетрудно видеть, что введение в систему регулятора позволило достаточно сильно улучшить качество переходного процесса, а, вместе с тем, и всего процесса управления системой.






