Рассмотрим моделирование в среде SIMULINK на конкретных примерах.
1. Звенья могут задаваться и с помощью блока передаточной функции Transfer Fcn.
Назначение:
Блок передаточной характеристики Transfer Fcn задает передаточную функцию в виде отношения полиномов:
 где
где
nn и nd – порядок числителя и знаменателя передаточной функции,
num – вектор или матрица коэффициентов числителя,
den – вектор коэффициентов знаменателя.
Параметры:
- Numerator — вектор или матрица коэффициентов полинома числителя
- Denominator -вектор коэффициентов полинома знаменателя
- Absolute tolerance — Абсолютная погрешность.
Порядок числителя не должен превышать порядок знаменателя.
Входной сигнал блока должен быть скалярным. В том случае, если коэффициенты числителя заданы вектором, то выходной сигнал блока будет также скалярным (как и входной сигнал). На рис. 4 показан пример моделирования колебательного звена с помощью блока Transfer Fcn.
Рис. 4. Пример моделирования колебательного звена.
2.Изображение блока Scope и окно для просмотра графиков показаны на рис. 5

Рис. 5. Осциллограф Scope
Для того, чтобы открыть окно просмотра сигналов необходимо выполнить двойной щелчок левой клавишей “мыши” на изображении блока. Это можно сделать на любом этапе расчета (как до начала расчета, так и после него, а также во время расчета). В том случае, если на вход блока поступает векторный сигнал, то кривая для каждого элемента вектора строится отдельным цветом.
3.Блок ХУ Graph имеет два входа. Верхний вход предназначен для подачи сигнала, который является аргументом (X), нижний – для подачи значений функции (Y).
Графопостроитель можно использовать и для построения временных зависимостей. Для этого на первый вход следует подать временной сигнал с выхода блока Clock. Пример такого использования графопостроителя показан на рис. 6.
Рис. 6. Пример использования блока ХУ Graph для отображения временных зависимостей.
Частотные характеристики
Рассмотрим составление частотных характеристик на конкретном примере:
Составим передаточную функцию разомкнутой системы:
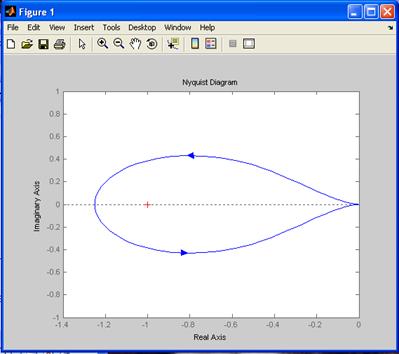
Исследуем устойчивость системы с помощью годографа Найквиста:
>> num=[5]
>> den=[2 4 -4]
>> sys=tf(num,den)
Transfer function:
5
--------------------------
2 s^2 + 4 s - 4
>> nyquist(sys),
где num - вектор или матрица коэффициентов числителя,
den– вектор коэффициентов знаменателя.
sys=tf(num,den) – вывод передаточной функции системы в среде MATLAB.
nyquist(sys) – функция вывода годографа Найквиста.
В результате получаем:
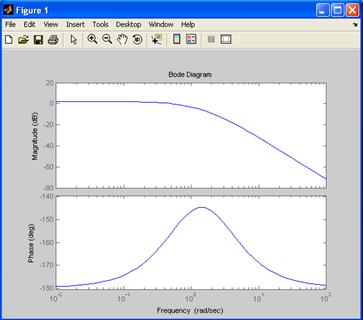
Определим устойчивость замкнутой системы по ЛАЧХ и ФЧХ разомкнутой САР:
>> bode(sys) – функция построения ЛАЧХ и ФЧХ
В результате, после нажатия клавиши «Enter» получим:
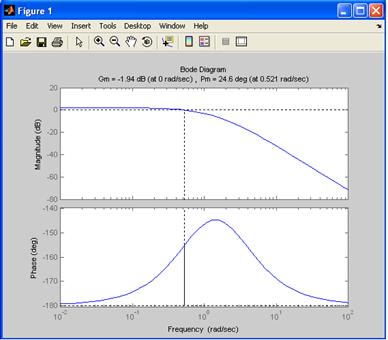
Исследуем функцию замкнутой системы, полученную, с помощью ALLMARGIN.
>>margin(sys)
Получим
Лабораторная работа № 1
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
Цель работы: исследование динамических свойств механической части электропривода на примере двухмассовых и эквивалентных одномассовых расчетных схем.
Общие сведения и рекомендации. Механическая часть реального электропривода представляет собой многомассовую упругую механическую систему, в которой наличие упругих связей накладывает определенные особенности на протекание в ней динамических процессов, отличающихся от процессов в одномассовом звене.
Для описания динамических свойств механической системы наиболее универсальными являются уравнения движения в обобщенных координатах, то есть уравнения Лагранжа [1, 3]
 , (1)
, (1)
где Wк – запас кинетической энергии системы, выраженный через обобщенные координаты qi (угловые и линейные перемещения) и обобщенные скорости  (угловые или линейные скорости);
(угловые или линейные скорости);
Qi = dАi/dqi – обобщенная сила (момент или усилие), определяемая суммой элементарных работ dАi всех действующих сил на возможном перемещении dqi.
Число обобщенных координат, как и число уравнений Лагранжа, описывающих динамические характеристики объекта моделирования, соответствует числу степеней свободы объекта, в данном случае – механической системы.
При наличии в кинематической схеме механической части электропривода передаточных устройств, обеспечивающих согласование форм или скоростей движения исполнительного органа с двигателем, целесообразно привести переменные и параметры механической системы к валу двигателя [1, 2, 3]. Это позволяет получить расчетную схему, дающую наглядное представление о реальном влиянии действующих масс, жесткостей на динамические свойства механический части электропривода (МЧ ЭП). Кроме того, в этом случае значительно проще составить систему уравнений Лагранжа, представляющую математическую модель исследуемого объекта.
На рис. 1 показана расчетная схема трехмассовой последовательной упругой системы, в которой обобщенными координатами являются угловые перемещения масс j1, j2, j3, и соответствующие им обобщенные угловые скорости w1, w2, w3. Статические моменты, обусловленные силами трения в элементах кинематической цепи первой (J1) и второй (J2) масс, ввиду их малости приняты равными нулю. В расчетной схеме действуют: М – момент двигателя, M12, М23 – моменты упругой деформации, Мс – статический момент исполнительного органа рабочей машины. Кроме того, на схеме приведены: C12, С23 – жесткости упругих связей между массами, b12, b23 – коэффициенты внутреннего вязкого трения. Согласно расчетной схеме с помощью уравнений Лагранжа по методике, изложенной в [1, 2, 3], составляется система дифференциальных уравнений, ко-
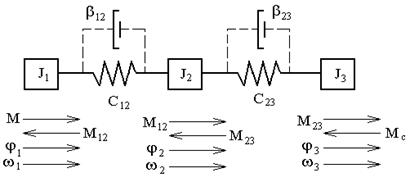
Рис. 1. Расчетная схема трехмассовой
последовательной упругой системы
торая является основой для составления структурной схемы системы и исследования динамических характеристик с помощью прикладных программ.
На практике чаще используют эквивалентную расчетную схему двухмассовой упругой системы (рис. 2), к которой приводят трехмассовую механическую систему, или одномассовую математическую модель, которая получается, если в двухмассовой модели положить  . Правила приведения изложены в [1, 2, 3]. Однако при получении эквивалентных расчетных схем теряются некоторые особенности исследуемого объекта, на что следует обратить внимание при моделирования механических систем [3].
. Правила приведения изложены в [1, 2, 3]. Однако при получении эквивалентных расчетных схем теряются некоторые особенности исследуемого объекта, на что следует обратить внимание при моделирования механических систем [3].
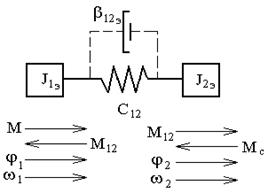
Рис. 2. Эквивалентная расчетная схема двухмассовой
упругой механической системы
Задание для домашней подготовки
1. Пользуясь данными в табл. 1 и номером бригады, выбрать двигатель постоянного тока независимого возбуждения для заданного механизма с учетом обеспечения допустимых технологических ускорений.
2. Составить математическое описание и структурную схему заданного механизма в абсолютных величинах.
3. Провести приведение исходной трехмассовой механической системы к эквивалентным двухмассовой и одномассовой моделям, составить для них математическое описание и структурные схемы в абсолютных единицах.
4. Ознакомиться с направленным нормированием структурных схем МЧ ЭП при наличии упругости [1, 3, 4].
5. Осуществить направленное нормирование математических моделей одномассовой и двухмассовой систем с упругостью первого рода.
6. Провести анализ устойчивости двухмассовой системы с учетом коэффициента соотношения масс  .
.
Задание к работе.
1. Набрать структурную схему эквивалентной двухмассовой механической части и снять частотные и временные характеристики w1(t), w2(t), М12(t), при ступенчатом управляющем воздействии.
2. Набрать нормированную модель двухмассовой системы с упругостью и выполнить работы, аналогичные п. 1.
3. Набрать структурную схему эквивалентной одномассовой механической части и снять частотную и временную характеристику w(t) при ступенчатом управляющем воздействии.
4. Набрать нормированную модель одномассовой системы с упругостью и выполнить работы, аналогичные п. 3.
5. Выполнить сравнительный анализ частотных и временных характеристик одно- и двухмассовой механических систем и выявить отличительные признаки между ними.
7. Осуществить варьирование параметров двухмассовой механической системы и выявить их влияние на частотные и временные характеристики объекта моделирования, изменяя параметры МЧ ЭП. J2 и C12 изменить в пределах (1..3)·J2 и (0.5...l.5)·C12 при числе исследуемых значений не менее трех.
Отчет должен содержать:
1. Цель работы.
2. Расчетную и структурную схемы (математическую модель) трехмассовой механической системы. Приведение параметров трехмассовой расчетной схемы к эквивалентной двухмассовой. Математические модели двухмассовой механической системы в абсолютных и нормированных единицах.
3. Частотные и временные характеристики двухмассовой эквивалентной механической системы. Анализ характеристик и выводы.
4. Приведение параметров двухмассовой расчетной схемы к эквивалентной одномассовой. Математические модели одномассовой механической системы в абсолютных и нормированных единицах.
5. Частотные и временные характеристики одномассовой эквивалентной механической системы. Анализ характеристик и выводы.
6. Сравнительный анализ частотных и временных характеристик одно- и двухмассовых систем, отличительные признаки.
7. Исследование влияния параметров двухмассовой механической системы на ее частотные и временные характеристики.
8. Анализ устойчивости двухмассовой системы.
9. Выводы по работе.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Назначение, виды и отличительные признаки расчетных схем механической части электропривода.
2. Понятие о математической модели объекта; требования, предъявляемые к математической модели.
3. С какой целью осуществляется направленное нормирование структурных схем?
4. Как выбираются базовые величины при направленном нормировании структурных схем?
5. Какая связь существует между частотными и временными характеристиками моделируемого объекта? Пояснить на примере проведенного моделирования.
6. Как влияют параметры двухмассовой упругой механической части электропривода на частотные и временные характеристики моделируемого объекта?
7. Принципиальные отличия частотных характеристик двух- и одномассовых механических систем.
Лабораторная работа № 2
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Цель работы: исследование динамических свойств двигателя постоянного тока независимого возбуждения, выявление влияния параметров двигателя и нагрузки на динамику электродвигателя, получение навыков построения динамических характеристик при ненулевых начальных условиях.
Общие сведения и рекомендации. Электрические машины постоянного тока представляют собой электромеханические преобразователи (ЭМП) электрической энергии в механическую и наоборот и подчиняются общим законам электромеханического преобразования энергии [2, 3]. Принципиальная электрическая схема двигателя изображена на рис. 3, где показаны: обмотка дополнительных полюсов (ДП), компенсационная обмотка (КО), являющиеся вспомогательными в машине, поэтому при математическом описании принимаются во внимание только их электрические параметры. Влияние вихревых токов в крупных машинах при изменении магнитного потока учитывается обмоткой ОВТ. К числу основных обмоток, участвующих в электромеханическом преобразовании энергии, относятся: обмотка якоря (ОЯ) и обмотка возбуждения (ОВ).

Рис. 3. Принципиальная электрическая схема двигателя постоянного тока независимого возбуждения
Физические процессы, протекающие в цепи якоря, описываются уравнением
 , (2)
, (2)
где  = Rя+Rдп + Rko – активное сопротивление цепи якоря, Ом;
= Rя+Rдп + Rko – активное сопротивление цепи якоря, Ом;
 = Lя+Lдп+Lко – индуктивность цепи якоря, Гн;
= Lя+Lдп+Lко – индуктивность цепи якоря, Гн;
Ф – магнитный поток обмотки возбуждения, Вб;
 – конструктивный коэффициент, где pп – число пар полюсов, N – число активных проводников, а – число пар параллельных ветвей обмотки якоря;
– конструктивный коэффициент, где pп – число пар полюсов, N – число активных проводников, а – число пар параллельных ветвей обмотки якоря;
w – угловая скорость якоря, с-1.
Уравнение механического движения электродвигателя (ЭД) имеет вид
 , (3)
, (3)
где М, Мc – соответственно момент двигателя и статический момент, приведенный к валу двигателя, Н·м;
J – момент инерции двигателя, кг·м2.
По уравнениям (2) и (3) составляется структурная схема двигателя постоянного тока независимого возбуждения, которая позволяет исследовать его динамические свойства при Ф = const [1, 2, 3].
В процессе исследования необходимо выявить влияние параметров двигателя и нагрузки на характер протекающих процессов. Этому способствует знание динамической механической характеристики двигателя [3], которую целесообразно исследовать путем введения периодической составляющей в нагрузку, поскольку в этом случае динамическая механическая характеристика для каждого цикла установившихся колебаний одинакова, а форма ее всецело зависит от параметров двигателя. Важным показателем при исследовании динамических свойств двигателя является также динамическая жесткость его механической характеристики. Динамическая жесткость позволяет оценить отклонение динамической характеристики от статической при изменении нагрузки скачком или в установившихся колебательных режимах.
Динамические механические характеристики представляют собой параметрический график зависимостей ω = f(t) и M = f(t), построенной в осях ω (ось Y – ось ординат) и М (ось X – ось абсцисс), соответственно, где время t является параметром.
Задание для домашней подготовки
1. Для выбранного двигателя постоянного тока независимого возбуждения (см. п. 1 задания для домашней подготовки к лабораторной работе № 1) составить математические модели, описывающие динамику двигателя в режимах пуска, реверса и наброса нагрузки.
2. По математическим моделям выполнить структурные схемы ДПТ НВ, рассчитав соответствующие параметры.
3. Изучить теоретический материал по математическому моделированию двигателя постоянного тока независимого возбуждения, по динамической механической характеристике ДПТ НВ и динамической жесткости [2, 3].
4. Определить параметры системы и выполнить необходимые преобразования Лапласа для построения динамических механических характеристик (см. задание к лабораторной работе, п. 2, 3).
5. Провести анализ устойчивости ДПТ НВ с помощью критерия Найквиста, представленного в форме диаграмм Боде. Определить условия представления математической модели ДПТ НВ апериодическим звеном второго порядка.
Задание к работе
1. Набрать структурную схему двигателя постоянного тока независимого возбуждения и снять частотные и временные характеристики для ступенчатого управляющего и возмущающего воздействий.
2. Используя значение полученного в лабораторной работе № 1 суммарного момента инерции  , построить для одномассовой механической части следующие динамические механические характеристики:
, построить для одномассовой механической части следующие динамические механические характеристики:
2.1. Пуск двигателя при активном статическом моменте Мс = const.
2.2. Плавный пуск ЭД с ускорением  .
.
2.3. Реверс ЭД при активном статическом моменте с ускорением  .
.
3. Исследовать временные характеристики двигателя при его работе на естественной механической характеристике (ЕМХ) и введении в статическую нагрузку периодической составляющей различной частоты, то есть  , где
, где  , Mc = Мн. В качестве W целесообразно взять частоту собственных колебаний двигателя Wсв, а две другие должны отличаться наполовину от Wсв в большую и меньшую сторону как на ЕМХ, так и при варьировании величин активного сопротивления резистора или индуктивности в цепи якоря двигателя. Число значений параметров активных резисторов, включаемых в цепь якоря, должно быть не менее трех и обеспечивать изменение жесткости статической характеристики в три раза по отношению к естественной. Дополнительные индуктивности в цепи якоря следует выбирать стандартными, удовлетворяющими условиям нагрева. Значение суммарной индуктивности цепи якоря
, Mc = Мн. В качестве W целесообразно взять частоту собственных колебаний двигателя Wсв, а две другие должны отличаться наполовину от Wсв в большую и меньшую сторону как на ЕМХ, так и при варьировании величин активного сопротивления резистора или индуктивности в цепи якоря двигателя. Число значений параметров активных резисторов, включаемых в цепь якоря, должно быть не менее трех и обеспечивать изменение жесткости статической характеристики в три раза по отношению к естественной. Дополнительные индуктивности в цепи якоря следует выбирать стандартными, удовлетворяющими условиям нагрева. Значение суммарной индуктивности цепи якоря  следует увеличить в два и в три раза, относительно индуктивности обмотки якоря .
следует увеличить в два и в три раза, относительно индуктивности обмотки якоря .
Отчет должен содержать:
1. Математическое описание и структурную схему двигателя постоянного тока независимого возбуждения. Анализ модели ДПТ НВ согласно п. 5 задания для домашней подготовки.
2. Предварительные расчеты для построения структурной схемы и проведения лабораторных исследований.
3. Результаты исследований динамических характеристик ДПТ НВ и анализ влияния параметров на динамику двигателя.
4. Динамические механические характеристики двигателя для проведенных исследований и их анализ.
5. Выводы по работе.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Как влияет соотношение постоянных времени Тм/Та на частотные и временные характеристики ДПТ НВ?
2. Что определяет собственная частота колебаний двигателя?
3. Охарактеризуйте каналы управления ДПТ НВ на основе полной структурной схемы двигателя и при Ф = const.
4. Понятие о динамической механической характеристике двигателя и ее назначении. Каким образом осуществляется ее построение?
5. Как влияют параметры цепи якоря на динамическую механическую характеристику?
6. Как влияет частота вынужденных колебаний нагрузки на динамическую механическую характеристику?
7. Понятие о динамической жесткости механической характеристики и ее назначении.
8. Как влияют параметры цепи якоря на динамическую жесткость механической характеристики ДПТ НВ?
9. Как влияет изменение статической жесткости на частотные характеристики двигателя?
10. Проанализируйте устойчивость ДПТ НВ.
Лабораторная работа № 3
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ С ЛИНЕЙНОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ
Цель работы: исследование динамических свойств электропривода по системе тиристорный преобразователь – двигатель постоянного тока независимого возбуждения, работающего по разомкнутому циклу.
Общие сведения и рекомендации. Для реализации указанной цели лабораторной работы нужно, прежде всего, ознакомиться с математическим описанием и структурными схемами разомкнутых электромеханических систем (ЭМС), изложенными в [1, 2, 3], обратив особое внимание на обобщенную ЭМС с линеаризованной механической характеристикой.
В структурную схему исследуемой электромеханической системы входит двигатель постоянного тока независимого возбуждения (ДТП НВ), двухмассовая упругая механическая часть, рассмотренные ранее, и тиристорный преобразователь в качестве регулируемого источника напряжения.
Тиристорный преобразователь характеризуется своими регулировочными и внешними характеристиками в режимах непрерывного и прерывистых токов, коэффициентом усиления, динамическими характеристиками в переходных процессах. Входной координатой тиристорного преобразователя (ТП) является напряжение управления (Uy), выходной координатой – выпрямленная ЭДС, величина которой обозначается в установившемся режиме (Ed), а в переходных процессах (ed). Управляющие свойства ТП определяются характеристиками управления Ed = f(Uy). Внутренняя координата ТП – угол отпирания α определяется характеристикой системы импульсно-фазового управления (СИФУ) в виде математического описания α = fy(Uy), а внешняя координата – математическим описанием характеристики вентильной группы Ed = fвг(α). Результирующая характеристика управления ТП представляет собой функцию Ed = fвг[fy(Uy)] = f(Uy). Поскольку для всех ТП характеристики управления вентильных групп одинаковы, то вид результирующей характеристики ТП будет зависеть от характеристики СИФУ, которая определяется формой опорного напряжения: косинусоидальной или пилообразной [1, 2].
Динамические свойства тиристорного преобразователя определяются неполной управляемостью тиристоров и параметрами сети, ведущей преобразователь. В зависимости от исполнения СИФУ и его инерционности тиристорный преобразователь для линейного участка характеристики управления представляется передаточными функциями вида:
 , (4)
, (4)
 , (5)
, (5)
 , (6)
, (6)
где kп, Тп – соответственно, коэффициент усиления и постоянная времени тиристорного преобразователя, Тп = 0,01…0,015 с;
τп – чистое запаздывание, τп = 0,007…0,015 с.
Математическое описание динамических процессов, протекающих в управляемом выпрямителе, является многовариантным, зависящим от требуемой степени адекватности, определяемой задачами конкретного исследуемого электропривода. Для выбора типа математической модели ТП вводится показатель Кр, равный отношению длительности переходного процесса в системе автоматического управления к длительности проводимости отдельного вентиля.
При Кр < 10 применяют импульсные модели (6), при Кр < 30 – непрерывные нелинейные модели (5) и при Кр > 30 – упрощенные непрерывные модели (4). Чем большее значение имеет показатель Кр, тем менее точной моделью ТП можно воспользоваться при исследовании динамических процессов электропривода. Учитывая значения Кр для промышленных электроприводов, чаще применяют непрерывные модели тиристорных преобразователей.
Полагая первоначально механические связи абсолютно жесткими ( ), следует получить передаточные функции системы по управляющему и возмущающему воздействиям. Поскольку корни характеристического уравнения системы зависят от соотношения постоянных времени, то целесообразно при домашней подготовке определить характер переходных процессов, подлежащей исследованию ЭMC, сравнив позднее эти расчеты с результатами лабораторных исследований согласно п. 2.
), следует получить передаточные функции системы по управляющему и возмущающему воздействиям. Поскольку корни характеристического уравнения системы зависят от соотношения постоянных времени, то целесообразно при домашней подготовке определить характер переходных процессов, подлежащей исследованию ЭMC, сравнив позднее эти расчеты с результатами лабораторных исследований согласно п. 2.
Задание для домашней подготовки
1. Подготовить математическое описание и структурную схему тиристорного преобразователя.
2. Подготовить математическую модель и структурную схему регулируемого электропривода постоянного тока с одномассовой механической частью.
3. Подготовить математическую модель и структурную схему регулируемого электропривода постоянного тока с двухмассовой упругой механической частью.
4. Изучить теоретический материал по анализу устойчивости нелинейных систем при наличии звеньев чистого запаздывания, руководствуясь методами теории автоматического управления [5].
Задание к работе
1. Набрать структурную схему регулируемого электропривода, состоящую из тиристорного преобразователя, электродвигателя и одномассовой механической части (МЧ), и исследовать частотные и временные характеристики по управляющему и возмущающему воздействиям по каналам ω, Iя, Етп.
2. Набрать структурную схему регулируемого электропривода с двухмассовой упругой механической частью и снять частотные и временные характеристики при ступенчатом управляющем и возмущающем воздействиях по каналам Етп, Iя, M12, ω1, ω2.
3. Построить временные характеристики для двух- и одномассовой МЧ по каналам, указанным в пп. 1 и 2, при наличии периодической составляющей в нагрузке (по аналогии с п.3 лабораторной работы № 2, только в качестве W целесообразно взять собственную частоту колебаний двухмассовой системы W12).
4. Исследовать временные характеристики Iя, M12, ω1, ω2 при линейном изменении во времени управляющего воздействия, обеспечивая допустимое ускорение εmax в период пуска до заданной скорости привода при отсутствии и наличии периодической составляющей в Mc на валу исполнительного органа (см. п.3 задания к данной лабораторной работе).
Отчет должен содержать:
1. Цель работы.
2. Математическое описание и структурную схему тиристорного преобразователя. Частотные и временные характеристики ТП при ступенчатом управляющем и возмущающем воздействиях. Анализ характеристик и выводы.
3. Математическое описание и структурную схему электропривода по системе ТП-ДПТ НB с одномассовой механической частью. Частотные и временные характеристики системы TП-ДТП НВ с одномассовой МЧ по каналам Iя, ω, Етп при ступенчатом управляющем и возмущающем воздействиях. Анализ характеристик и выводы.
4. Математическое описание и структурную схему системы ТП - ДТП НВ с двухмассовой упругой механической частью. Частотные и временные характеристики системы ТП-ДПТ НВ двухмассовой упругой механической частью по каналам Етп, Iя, M12, ω1, ω2 при ступенчатом управляющем и возмущающем воздействиях. Анализ характеристик и выводы.
5. Временные характеристики координат при гармоническом возмущающем воздействии (п.3 задания к данной лабораторной работе).
6. Временные характеристики Iя, M12, ω1, ω2 при линейном изменении во времени управляющего воздействия при отсутствии и наличии периодической составляющей в статическом моменте на валу исполнительного органа. Анализ характеристик и выводы.
7. Общие выводы по работе.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Как выглядят частотные и временные характеристики тиристорного преобразователя при ступенчатом управляющем и возмущающем воздействиях?
2. Какие математические модели существуют для описания тиристорного преобразователя постоянного тока? Охарактеризуйте критерии выбора той или иной модели.
3. Как влияют электромагнитная и электромеханическая постоянные времени на динамические характеристики электропривода с одномассовой механической частью?
4. Физический процесс демпфирования механических колебаний электроприводом с линейной механической характеристикой в двухмассовой механической части.
5. Как влияет периодическая составляющая в статическом моменте на динамику электропривода с двухмассовой механической частью?
6. Способы снижения амплитуды механических колебаний в электроприводе с двухмассовой частью.
7. Что понимается под прямой оценкой колебательности системы и как она вычисляется?
8. Косвенная оценка демпфирующей способности электропривода при упругих колебаниях и ее определение.
Лабораторная работа № 4
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА
Цель работы: исследование динамических свойств электропривода по системе тиристорный преобразователь – двигатель постоянного тока независимого возбуждения (ТП-ДПТ НВ) при наличии обратных связей.
Общие сведения и рекомендации. В автоматизированных электроприводах для обеспечения большого диапазона регулирования при формировании статических и динамических характеристик электропривода применяются различные обратные связи. В данной лабораторной работе будут рассмотрены наиболее часто применяемые из них в системах стабилизации скорости электропривода постоянного тока, основным назначением которых является минимизация отклонений скорости от заданного значения, вызванных воздействием на систему различного рода возмущений в виде колебаний напряжения сети, дрейфа параметров, изменения нагрузки на валу двигателя и другими причинами.
Объектом исследований остается электромеханическая система (ЭМС), рассмотренная ранее, при введении положительной обратной связи (ОС) по току и отрицательной обратной связи по скорости.
Исследованию на первом этапе подлежит одномассовая ЭМС, в которой упругие колебания между элементами системы отсутствуют. Это упрощение при расчетах реальной системы характерно, как правило, для малоответственных ЭП.
Системы, замкнутые отрицательной обратной связью по скорости, являются простыми в техническом исполнении, хорошо стабилизируют скорость двигателя и, как это следует из механической характеристики замкнутой системы, обеспечивают в пределе нулевой статизм [1, 2].
Положительная ОС по току, как показано в [1, 3, 4], позволяет достичь не только полной стабилизации скорости, но и получить характеристику, статизм которой отрицателен. Однако в динамике такие системы неустойчивы [1, 3, 4], поэтому чаще всего применяют комбинированные обратные связи, например, положительную по току и отрицательную по скорости.
Для введения в систему управления автоматизированного ЭП сигналов обратных связей о состоянии параметров объекта применяют различные измерительные датчики. В исследуемой системе автоматизированного электропривода применяются датчики угловой скорости и тока.
К числу распространенных датчиков угловой скорости относится тахогенератор постоянного тока (ТГ) с независимым возбуждением или с возбуждением от постоянных магнитов.
Входной координатой ТГ является угловая скорость ω, выходной – напряжение Uвых, выделяемое на сопротивлении нагрузки Rh. Напряжение Uвых рассчитывается по формуле
 , (7)
, (7)
где k, Ф, Rтг – соответственно, конструктивная постоянная, магнитный поток, сопротивление якорной обмотки и щеточного контакта тахогенератора;
kтг – передаточный коэффициент ТГ, В·с/рад.
При работе тахогенератора возникают низкочастотные оборотные и полюсные пульсации, составляющие до 1 % выходного напряжения. В ряде случаев для снижения пульсаций к выходу ТГ подключают конденсатор емкости С.
Динамические характеристики тахогенератора связаны с инерционностью электромагнитных переходных процессов, происходящих в цепи якоря.
Передаточная функция тахогенератора постоянного тока для схемы с конденсатором
 , (8)
, (8)
где  – постоянная времени фильтра.
– постоянная времени фильтра.
При отсутствии фильтра ввиду малости постоянной времени тахогенератора (Ттг  0.001 с) его принимают в ряде случаев звеном с передаточной функцией Wтг(p) = kтг.
0.001 с) его принимают в ряде случаев звеном с передаточной функцией Wтг(p) = kтг.
В электроприводах постоянного тока находят применение датчики тока (ДТ), в которых сигнал о величине тока снимается в виде напряжения с шунта, включенного в цепь якоря. Выходное напряжение датчика Uдт max = ± 10 В, коэффициент усиления может меняться от 53 до 135. Напряжение на входе (0...75) мВ, чувствительность 2 мВ, кратность измеряемых токов 1...2.5, полоса пропускания не менее 2 кГц.
Передаточная функция датчика тока описывается апериодическим звеном с постоянной времени Тдт 0.001 с. Если считать ДТ безынерционным, то тогда его передаточная функция примет вид
 , (9)
, (9)
где Uнш – номинальное падение напряжения на сопротивлении шунта Rш при протекании тока якоря, равного номинальному току шунта Iнш, А;
kудт – коэффициент усиления ячейки датчика тока.
При определении коэффициентов ОС датчиков тока Кот и угловой скорости Кос следует учитывать, что максимальное значение задающего сигнала управления Uз mах = 10 В.
Тогда коэффициент Кос = Uз mах/ω0 max, где ω0 max – максимальная угловая скорость идеального холостого хода электропривода. При выборе тахогенератора постоянного тока целесообразно, чтобы его угловая скорость, приведенная в паспорте, составляла  .
.
Коэффициент обратной связи по току можно определить по формуле Кот =  , где коэффициент передачи шунта Кш = Uнш/Iнш, а Кудт = Uдт мах/Uнш. В результате получаем Кот = Uдт мах/Iнш. Необходимо обеспечить такой коэффициент усиления ячейки датчика тока, чтобы Uдт мах = Uз mах.
, где коэффициент передачи шунта Кш = Uнш/Iнш, а Кудт = Uдт мах/Uнш. В результате получаем Кот = Uдт мах/Iнш. Необходимо обеспечить такой коэффициент усиления ячейки датчика тока, чтобы Uдт мах = Uз mах.
Более подробную информацию и справочные материалы о датчиках угловой скорости и тока можно получить в [1, 2].
На втором этапе выполнения лабораторной работы, связанном с исследованием двухмассовой ЭМС, необходимо проследить влияние обратных связей на демпфирующие свойства электропривода. С этой целью следует поварьировать величиной коэффициентов обратных связей. Важно установить также, какое действие оказывают на демпфирующую способность электропривода знаки обратных связей при выбранных ранее значениях коэффициентов.
Задание для домашней подготовки
1. Подготовить математические описания и структурные схемы для системы ТП-ДПТ НВ с положительными и отрицательными обратными связями при одномассовой механической части электропривода.
2. Подготовить структурные схемы для системы ТП-ДПТ НВ с положительными и отрицательными обратными связями при двухмассовой упругой МЧ электропривода.
3. Изучить теоретический материал о влиянии обратных связей на статические и динамические характеристики регулируемого электропривода постоянного тока с одно- и двухмассовой механической частью [1, 2].
4. Рассчитать значения коэффициентов обратных связей.
5. Изучить структурные схемы и передаточные функции датчиков тока и скорости [1, 2].
Задание к работе.
1. Для одномассовой электромеханической системы ТП-ДПТ НВ:
1.1. Набрать структурную схему с положительной обратной связью по току двигателя и иссле